
Fターム[5H004KC02]の内容
フィードバック制御一般 (10,654) | 制御部 (1,337) | 最適制御、最適化制御 (306) | 評価基準が明確なもの (146)
Fターム[5H004KC02]の下位に属するFターム
Fターム[5H004KC02]に分類される特許
1 - 20 / 31
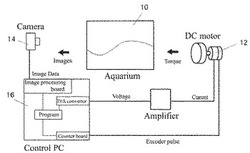
移動体の動作制御装置及びこれを用いたスロッシング制御装置
【課題】 移動体の状態を反映する画像情報をもとに、特徴量を抽出する手法を用いることはなく移動体を的確に制御することを可能にする移動体の動作制御装置を提供する。
【解決手段】 水を収容した水槽10と、水槽10を一方向に往復動させる駆動部12と、水槽10を視認するカメラ14と、カメラ14により取得された画像情報に基づき駆動部12により水槽10を制御して水槽10内の水を揺動状態から静止状態へ整定する制御部16とを備えるスロッシング制御装置であって、制御部16は、カメラ14から所定周期にしたがって順次取り込まれる水槽10中の水の画像情報を、数ベクトル空間を除くヒルベルト空間における1点と解釈して、安定化制御方法により、水槽10内の水を揺動状態から静止状態へ整定するようにモータ12を制御することを特徴とする。
(もっと読む)
プラントの運転条件最適化システム、プラントの運転条件最適化方法、プラントの運転条件最適化プログラム

【課題】安価かつ容易にモデル化でき、人が制御・設定できる変数を用いることにより現実にプラントに実装でき、取得したデータが示していた変数間の相関性を保った範囲で最適な運転条件が得られるプラントの運転条件最適化システム等を提供する。
【解決手段】計測データ記録部43は、運転状態データ取得部41により取得された運転状態データS−DATAと運転指標データ取得部42により求められた運転指標データI−DATAとを所定の項目に基づき関連させた一連の計測データとして計測DBに記録する。回帰モデル作成部44は、運転状態データS−DATA側を表す運転状態変数を説明変数とし、運転指標データI−DATA側を表す運転指標変数を目的変数として所定の多変量解析を行って回帰モデルを作成する。運転指標変数最適化部45は、回帰モデルに基づき運転指標変数を最適化する運転状態変数を求める。
(もっと読む)
企業最適化のために、計画、スケジューリング、及び制御を統合する装置及び方法
方法は、第1の入力データを1又は複数の第1のプロセス制御システムのコンポーネント(210〜212)から受信するステップ(502)を含む。方法はさらに、第2の入力データを1又は複数のプロセス制御システムのコンポーネント(202a〜202o、204a〜204n、206a〜206p、208a〜208m)から受信するステップを含む。さらにまた、方法は、反復プロセスを実行するステップを含み、該ステップは、第1の入力データを用いて少なくとも1つの目標数量への1又は複数の調整を特定するステップ(506)と、1又は複数の調整を用いて1又は複数の寄与値を特定するステップ(508)と、1又は複数の寄与値及び第2の入力データを用いて、1又は複数の推定される生産収率を特定するステップ(510)とを含む。各目標数量は、製造される少なくとも1つの中間製品又は最終製品に関連する。各寄与値は、各最終製品に対する中間製品の寄与に基づく。各推定される生産収率は、製造される中間製品及び最終製品の1つの期待数量に関連する。  (もっと読む)
(もっと読む)
制御装置のパラメータ調整法
【課題】特性が変動する制御対象のモデルを制御系に組み込み、最適化手法を用いて制御演算パラメータを調整する方法を提供する。
【解決手段】制御対象の特性の標準値に基づく位置決め制御演算に、制御対象の特性変動を模擬する定数倍の演算を追加し、制御対象の特性の標準値と変動した特性の値との比を、前記追加した定数倍の演算の定数として設定し、前記定数倍の演算の定数が設定された位置決め制御演算において、所定の評価関数の値を収束させる制御パラメータを、最適化手法を用いて求める。
(もっと読む)
多目的最適解集合算出装置及び多目的最適解集合算出方法及び多目的最適解集合算出プログラム
【課題】所定の駆動基準を充足する全体最適解の集合を算出すること。
【解決手段】複数の駆動状態の複数の組み合わせ毎に基づいて算出されたトレードオフ関係にある複数の目的関数の組み合わせを最小化又は最大化する設計変数の部分最適解の集合と、複数のステップから構成されステップ毎に前記駆動対象の駆動条件が異なる駆動基準のステップ毎の駆動条件の値を入力する入力部1と、複数の駆動状態の複数の組み合わせ毎に抽出される部分最適解に基づいて、駆動状態の範囲内の部分最適解を予測可能な達成値マップを作成する達成値マップ作成部201と、駆動状態の項目毎に作成される達成値マップから達成値を抽出する達成値抽出部202と、達成値を前記駆動基準のステップ毎に積算して算出される総和達成値から全体最適解の集合を算出する全体最適解算出部21とを備える。
(もっと読む)
PID調整装置およびPID調整プログラム
【課題】PID調節器の調整方法等に関して、広く現場のエンジニアに普及させることが可能となり、且つ調整労力と時間とを著しく短縮できるPID調整装置30等を提供する。
【解決手段】伝達関数パラメータ取得部32は、制御対象10に入力する操作量MVの時系列データと操作量MVに応じて制御対象10から出力される制御量PVの時系列データとに基づき制御対象10を表現する複数の伝達関数のパラメータを求める。適合性取得部34は当該パラメータを有する各伝達関数が出力した推定制御量と実際の制御量との適合率を求める。最良伝達関数選択部36は当該適合率に基づき、最良の適合性を有する伝達関数を選択する。最適PIDパラメータ探索部38は、選択された伝達関数11等を対象として設定値SVに対する設定値応答及び外乱dに対する外乱応答の結果から予め決めておいた評価指標を満たすようにPID調節器20のPIDパラメータを探索する。
(もっと読む)
機器制御装置、機器制御システム、機器制御方法およびプログラム
【課題】機器を快適かつ省エネとなるように制御することのできる機器制御装置を提供する。
【解決手段】環境情報取得部101は、被制御機器4の周囲の状態を表す環境情報を取得する。快適性判断部5は、離散化された環境情報で表される環境状態ごとの、ユーザの嗜好情報に基づいて、そのユーザの環境状態ごとの快適値を算出する。パス決定部は、環境状態ごとの離散化された情報と、ルール記憶部102の被制御機器4を作動する際の制御の目標であるルールとの組で表される機器状態ごとに、被制御機器4のエネルギ消費率の補数または逆数である省エネ値を取得し、現在の機器状態からユーザの快適値が最大となる環境状態に到る機器状態の経路の候補の中から、その経路における各機器状態の快適値と各機器状態の省エネ値とから所定の演算方法で算出される評価値が最大の最適パスを選択する。ルール実行部103は、最適パスに従って被制御機器4を作動させる。
(もっと読む)
自律移動ロボットの動作計画装置、方法、プログラム及び記録媒体並びに自律移動ロボットの動作制御装置及び方法
【課題】より安全で、より動作計画が破綻しづらい自律移動ロボットの動作計画を行う。
【解決手段】衝突判定部4が、互いに異なる複数の一時的な流れが生じた場合に、各状態にある上記自律移動ロボットが各行動に基づいて移動した場合に障害物に衝突するかどうかを判定する。衝突確率計算部6が、衝突すると判定された一時的な流れが生じる確率の総和である衝突確率を計算する。報酬決定部7が、衝突確率を考慮して報酬を決定する。動的計画部2が、報酬に基づいて動的計画を行う。
(もっと読む)
自走式移動体の制御システム
【課題】実時間制御において、複合的な目的を達成するとともに作業時間を短縮することが可能な自走式移動体の制御システムを提供する。
【解決手段】自走式掃除機100の制御システム1は、変位可能な本体110と、本体110に取り付けられ、本体110に対して変位可能なアーム120と、本体110を駆動するための車輪駆動用モータユニット133と、アーム120を駆動するための第1のサーボ127と第2のサーボ128と、コンピュータ200とを備え、コンピュータ200は、本体110の変位に関する因子とアーム120の変位に関する因子との両方の因子に基づいて本体110の挙動とアーム120の挙動とを評価する評価関数を利用して、本体110の挙動とアーム120の挙動とを制御するように車輪駆動用モータユニット133と第1のサーボ127と第2のサーボ128とを最適制御する。
(もっと読む)
車両の駆動力制御装置
【課題】未来の運転者操作量(換言すれば運転負担)と未来の燃料消費量を予測し、状況の変化に応じてそれらを同時に最小化あるいは最適化することを可能とするようにした車両の駆動力制御装置を提供する。
【解決手段】エンジンでフューエルカットが実行されるときと否とに分けてモデリングされると共に、状態方程式で記述された、エンジンから車体までを制御対象として変速比とエンジン回転数を車速に基づいて算出される代表目標変速比と燃費最適作動線に従って算出される目標エンジン回転数にフィードバック制御する変速比制御系とを備え、アクセルペダル開度とブレーキペダル開度の現時刻からnステップ未来までの運転者操作量の総和を評価する運転者操作量評価関数などに従って状態xの変化が最適となるように予めオフラインで生成された最適解群を検索して代表変速比を修正し、操作量として制御対象に加える。
(もっと読む)
制御器、制御方法および制御プログラム
【課題】計算量を減少させて、実タスクへ適用可能な方策勾配法のアルゴリズムを利用した制御器を提供する。
【解決手段】制御信号を制御対象に与える処理を行って、制御対象の状態量を観測器(たとえば、位置センサ、角度センサ、加速度センサ、角加速度センサなど)で観測し、この観測結果により定常分布の対数の偏微分を推定することで、方策の勾配を推定し、推定結果に基づいて、方策を更新する。そして、更新された方策により、さらに、制御対象が制御される。
(もっと読む)
自律的に適応する半導体製造
生物学に基づく自律学習ツールシステムと、生物学に基づく自律学習ツールシステムが学習と分析とに用いる方法とを提供する。生物学に基づく自律学習ツールシステムは、(a)1つ以上のツールシステムと、(b)相互作用マネージャと、(c)生物学的な学習原理に基づく自律学習システムとを含む。1つ以上のツールシステムは、特定のタスク又はプロセスのセットを実行して、アセットと、アセットに関するデータとを生成する。アセットと、アセットに関するデータは、様々なプロセス及び関連するツールの性能を特徴付ける。相互作用マネージャは、データを受信して、フォーマットする。このようなシステムは、メモリプラットフォームと処理プラットフォームとを含む。メモリプラットフォームと処理プラットフォームは、再帰的に定義され、ネットワークを通して通信する。次第に複雑化する自律ツールをアセンブルするために、自律ツールシステムは、再帰的に配備され得る。個々の又はアセンブルされた複雑な自律ツールに関連する自律学習システムにおいて生成され蓄積された知識は、意味ネットワークにキャストされ得る。意味ネットワークは、コンテキストに基づいてツールの目標を学習して進めるために用いられ得る。 (もっと読む)
制御システムのための制御パラメータを確定する方法
【課題】制御システムを同調する方法を改良することによって、用いるのに容易で且つ最小の実際のプラント動作しか必要としない方法及びシステムを提供する。
【解決手段】コントローラ(14)及びプラント(10)を有する制御システムのための制御パラメータを確定する方法は、プラントのモデル(70)及びコントローラのモデル(64)を確立するステップ、及び閉ループ・システムに関する性能指数を、選択された安定余裕を説明するコントローラ・パラメータの関数として計算するステップを含む。
(もっと読む)
プラント最適運転制御システム
【課題】プラントの運転を安定に保ったまま運転コストを最小化することのできるプラント最適運転制御システムを提供すること。
【解決手段】自家用発電プラント20の運転コストを最小化する最適運転点を計算する最適運転点計算手段3と、前記最適運転点計算手段の計算により求めた前記最適運転点に応じて最適化モデルに基きプラントを自動制御する自動制御手段9と、入力に応じて前記自動制御手段による前記自家用発電プラントの自動制御運転を開始する自動制御投入手段5と、前記自動制御投入手段が自動制御運転を行うに際し、前記最適化モデルにおける前記自家用発電プラントの最適化対象の変数を選択する最適化変数選択手段6とを備えたことを特徴とするプラント最適運転制御システム。
(もっと読む)
自動適合装置及び方法
【課題】効率的且つ効果的に適合値を決定する。
【解決手段】自動適合システム100において、次善最適解決定処理が実行される。当該処理においては、パラメータx1及びx2に応じて変化する目的関数F1及び制約関数F2相互間のパレート解が、適合範囲内のパラメータ値について導出され、目的関数F1及び制約関数F2により規定される座標平面上で、パレート解に対応する座標点を繋げて得られるパレート解曲線PRF_Pが設定される。一方、当該適合範囲でパラメータを変化させた場合の、目的関数F1及び制約関数F2各々における最大値と最小値との偏差DOPT及びDLIMに基づいて規定される傾きkに、更にエンジン200の定常比率Aに応じて定まる補正係数αを乗じてなる傾きk’の直線が設定される。この直線とパレート解曲線との接点に対応するパレート解が、次善的な最適解として抽出される。
(もっと読む)
複数入力/出力制約を有する複数入力/出力システム用の多変数コントローラの設計方法
【課題】 複数入力及び/又は出力制約を有する複数入力/出力システム用の多変数コントローラの設計方法を提供する。
【解決手段】 複数の入力及び出力制約を有する複数入力複数出力(MIMO)システム(208)を動的に制御するための方法であって、本方法が備えられる。本方法は、入力及び出力制約が無い状態でシステム(208)の複数の制御参照入力の閉ループトラッキングを実装するようにMIMOトラッキングコントローラ(202)を構成する段階と、複数の制御参照入力に適用される参照修正値を生成することによってMIMOシステム(208)の入力及び出力制約を実現するようにMIMO制約コントローラ(210)を構成する段階とを含む。
(もっと読む)
制御マップ最適化装置
【課題】制御対象の特性に依拠せず制御マップの最適化を行うことが可能な汎用的な制御マップ最適化装置を提供する。
【解決手段】制御マップ最適化装置1は、入力された引数x、yに対応する格子点(xi,yj)に設定された制御パラメータPi,jまたは引数x、yに対応するマップ位置(xE,yE)の近傍の格子点に設定された制御パラメータPi,jから補間により算出した制御パラメータPEを出力する制御マップMと、制御パラメータが取るべき値に関する情報Qと出力された制御パラメータPEとに基づいて制御マップMの制御パラメータPi,jの最適化を行う最適化手段3とを備え、最適化手段3は、最急降下法により情報Qと制御パラメータPEとから作成された単峰性関数の誤差関数Errorに基づいて制御マップMにおけるマップ位置(xE,yE)の近傍の格子点に設定された制御パラメータPi,jの値を更新し、この更新処理を繰り返す。
(もっと読む)
ボイラプラントの制御装置
【課題】制御対象を模擬したモデルと実際の制御対象との挙動との間に誤差がある場合でも、局所最適解に陥るリスクを極力排除して制御対象を安全で安定に運転制御して最適解を探索できるボイラプラントの制御装置を提供する。
【解決手段】ボイラプラントの計測データを入力してプラント運転特性を模擬したプラントモデルに基づいてボイラプラントへの運転操作指令値を演算して運転を行うボイラプラントの制御装置に、運転データを蓄積した運転実績データベースと、蓄積した運転データから操作量の変化傾向を演算してボイラプラントの状態を判定する運転状態判定手段と、プラントモデルで計算したプロセス値とボイラプラントの計測値との誤差を計算するモデル誤差評価手段と、蓄積された過去のデータを含むプロセス値と操作指令値との相関関係をモデル化する運転データモデル化手段と、前記誤差値を用いて操作指令候補値を計算する探索点決定手段とを備えた。
(もっと読む)
運転支援装置及びプログラム
【課題】オンラインでの一定周期繰り返し計算を行え、随時ケーススタディのようなオフラインの計算も行うことである。
【解決手段】外部からプラントの運転データをデータ入力伝送手段16で取得し、入力切替手段21は、データ入力伝送手段16から運転データと定数データとに基づき構成される複数の入力データのうちどのデータを利用するか切り替える。最適化演算手段22は、入力データに基づき予め定められた演算を実行し、出力切替手段23は最適化演算手段22の計算結果をどの出力データとして出力するかを切り替える。実行管理手段24は入力切替手段16及び出力切替手段19の切り替え及び最適化演算手段22の実行を制御し、マンマシン表示手段18は出力切替手段23で切り替えられ出力された出力データのうち表示すべき出力データを表示する。
(もっと読む)
移動体等の制御装置及び方法
【課題】外乱状況によらず制御内容の評価を適正に行い、以って適切に制御パラメータを最適化する。
【解決手段】挙動検出部50により判断される所定挙動の時間範囲毎に、基準制御パラメータ記憶部70から読み出される基準制御パラメータに所定の変更を加え、変更が加わった基準制御パラメータに従って制御対象に関する制御量を制御する。特徴ベクトル算出部52は、各時間範囲内の制御量に基づいて、該時間範囲における制御の特徴を示す特徴ベクトルPnを算出する。そして、算出される特徴ベクトルに基づいて、特徴ベクトルデータベース58の記憶内容を更新する。また、特徴ベクトル抽出部56は、算出される特徴ベクトルPnとの類似度に基づいて、特徴ベクトルデータベース58に記憶される特徴ベクトルのうち1つである特徴ベクトルPwinを選出する。そして、それら特徴ベクトルが特徴を示す制御の評価値En,Ewinに基づいて制御の改善量ΔEnを算出し、該改善量ΔEnに応じて基準制御パラメータK0を更新する。
(もっと読む)
1 - 20 / 31
[ Back to top ]