
Fターム[5H115PU22]の内容
車両の電気的な推進・制動 (204,712) | 走行用駆動源 (21,653) | エンジン (11,973) | ハイブリッド型 (11,939) | クラッチにより切換るもの (976)
Fターム[5H115PU22]に分類される特許
101 - 120 / 976
ハイブリッド車両の制御装置
【課題】第1締結要素を解放する際に、第2締結要素の発熱量を抑制しつつ、エンジンの吹き上がりを抑制することができるハイブリッド車両の制御装置を提供すること。
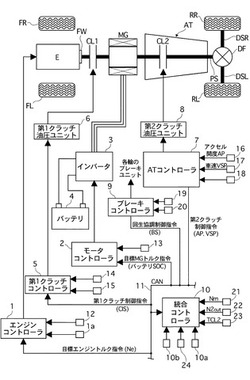
【解決手段】エンジンEを駆動しつつ、第1締結要素CL1を締結し、第2締結要素CL2をスリップ制御している状態から、第1締結要素CL1を解放する際に、目標エンジントルクが設定値以下となってから第1締結要素CL1を解放するまでの待ち時間を、第2締結要素CL2の温度が高いほどおよび/または目標駆動トルクが大きいほど短く設定するようにした。
(もっと読む)
ハイブリッド車両のモード切り替え時モータ回転数制御装置

【課題】油温や電源温度にかかわらず、モード切り替え時のモータトルク制御変化と第2クラッチトルク容量制御変化とを調時させて、空吹けやエンジンストールを防止する。
【解決手段】油温が設定温度未満の低油温時や、バッテリ温度が設定温度未満の電源低温時は、電気(EV)走行モードまたはハイブリッドHV走行モードの間に、EVモードおよびHEVモード間のWSCモードで行うモータ回転数制御で用いる目標モータ回転数として、低油温時用目標モータ回転数または電源低温時用目標モータ回転数をWSCモータ回転数制御マップにセットして学習する(S16,S18)。WSCモードである間に、S16またはS18で学習した低油温時用目標モータ回転数または電源低温時用目標モータ回転数に基づき、モータの回転数制御を行う。
(もっと読む)
電動車両の制御装置
【課題】モータジェネレータと駆動輪との間に設けられた締結要素のスリップ締結とロックアップとのハンチングの発生を抑制できる電動車両の制御装置を提供することこと。
【解決手段】車体速に対応したロックアップ判定閾値に基づいて、車体速がロックアップ判定閾値を越えると、第2クラッチをロックアップ状態とし、車体速がロックアップ判定閾値以下で、第2クラッチをスリップ締結状態とする締結要素制御部を備え、ロックアップ判定閾値としてのTCS時第1切替線L1tcsは、車体速がVset1以下の低速の領域では、車体速がVset2以上の高速の領域に比べて高く設定されていることを特徴とする電動車両の制御装置とした。
(もっと読む)
ハイブリッド車両の制御装置
【課題】演算に必要な構成の簡略化が可能なハイブリッド車両の制御装置を提供すること。
【解決手段】アクセル開度と自動変速機3の入力回転毎に設定されたエンジン用の目標定常トルクマップとモータジェネレータ用のアシストトルクマップとを備え、これら2つのトルクマップの合計を車両の目標駆動トルクとする演算を行う統合コントローラ20を備えたハイブリッド車両の制御装置であって、統合コントローラ20は、エンジン効率とモータ効率を合わせたシステム効率が最適となるトルクを基準として設定した最適発電トルクマップとアシストトルクマップとを1つのマップとしたアシスト・発電統合トルクマップを備え、このアシスト・発電統合トルクマップを用いてアシストトルクおよび発電トルクを演算するとともに、アシストトルクを演算する場合は0トルクで下限制限し、前記発電トルクを演算するときは0トルクを上限制限するようにした。
(もっと読む)
車両用走行制御装置
【課題】コースト状態においてエンジンの始動と変速の制御とをより適切に行うこと。
【解決手段】駆動源となるエンジンおよびモータと、駆動源からの駆動力を異なるギヤ比で車輪に伝達する変速機と、エンジンの始動を制御するエンジン始動制御手段と、変速機の変速を制御する変速制御手段と、自車両がモータのみを駆動源として走行し、かつ、コースト状態であるときに、エンジンの始動要求と変速機の変速要求とが発生しているか否かを判定する始動判定手段と、を備え、始動判定手段が、自車両が前記モータのみを駆動源として走行し、かつ、コースト状態であるときに、エンジンの始動要求と変速機の変速要求とが発生していると判定した場合に、エンジン始動制御手段は、変速制御手段が現在の変速段から目標変速段に掛け替えを完了するまでエンジンの始動を禁止し、該掛け替えの完了後に、エンジンを始動させる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】急減速時にエンストを防止するハイブリッド車両の制御装置を提供する。
【解決手段】エンジン又はモータジェネレータが出力する回転を自動変速機によって変速して出力することにより走行し、モータジェネレータを発電機として動作させてバッテリに蓄電可能なハイブリッド車両において、エンジン及びモータジェネレータの動作を制御する制御装置であって、自動変速機は、第1及び第2の摩擦要素の少なくとも一つの締結状態を変更することによって変速を実現し、ハイブリッド車両が急減速状態となったときに、急減速に伴って変速が行われるときに締結状態が変化する第1の摩擦要素とは異なる第2の摩擦要素を解放状態に制御する。
(もっと読む)
前後輪駆動車両
【課題】車両後進時における車両エネルギ効率の悪化を抑制可能な前後輪駆動車両を提供する。
【解決手段】後輪駆動装置1と前輪駆動装置6とを備えた車両3であって、後輪駆動装置1は、車両3の駆動力を発生する電動機2A、2Bと、電動機2A、2Bと後輪Wrとの動力伝達経路上に設けられ、解放又は締結することにより電動機2A、2B側と後輪Wr側とを遮断状態又は接続状態にする油圧ブレーキ60A、60Bと、電動機2A、2Bを制御するとともに油圧ブレーキ60A、60Bを制御するECU45と、電動機2A、2Bと後輪Wrとの動力伝達経路上に油圧ブレーキ60A、60Bと並列に設けられる一方向クラッチ50と、を備える。車両後進時には、少なくとも後輪駆動装置1に後進駆動力を発生させて後進させ、後輪駆動装置1に後進駆動力を発生させるときに、ECU45は油圧ブレーキ60A、60Bを締結して電動機2A、2B側と後輪Wr側とを接続状態にし、電動機2A、2Bを逆方向の回転動力が発生するよう駆動する。
(もっと読む)
車両の変速制御装置
【課題】自動変速機の変速過程のイナーシャフェーズにおける変速ショックの低減と応答性の向上との両立を図る。
【解決手段】モータを有する駆動源と駆動輪との間に有段式の自動変速機を介装する。この自動変速機による変速時には、摩擦締結要素の掛け替えを行うとともに、イナーシャフェーズでは、モータを目標回転数へ向けて回転数制御する。車速変化により変速が行われる第1変速パターンでは、変速ショックを低減するように、目標回転数の変化率を低く制限し(ステップS17,S19)、運転者のアクセル操作により変速が行われる第2変速パターンでは、応答性を重視して、第1変速パターンよりも目標変化率の変化率を高くする(ステップS18,S20,S21)。
(もっと読む)
ハイブリッド車両の制御装置
【課題】モータジェネレータによるアシスト頻度が多くなったときの運転性の悪化を抑制する。
【解決手段】動力源としてエンジン及びモータジェネレータを備えるハイブリッド車両の制御装置であって、通常走行時よりも駆動力が要求される走行時であるかを判定する判定手段(S1)と、モータジェネレータを電動機として機能させるアシスト時間を算出するアシスト時間算出手段(S2,S4,S5)と、を備え、アシスト時間算出手段は、通常走行時よりも駆動力が要求される走行時であると判定されたときに、アシスト時間を通常走行時よりも短くする。
(もっと読む)
プラグインハイブリッド電気自動車及び該プラグインハイブリッド電気自動車の制御方法
【課題】プラグインハイブリッド電気自動車において、単位時間あたりに充電可能な電力量が制限される状況下で排気浄化のための還元剤たる尿素水溶液の凍結防止とバッテリの充電量の確保の両立を図る。
【解決手段】プラグインハイブリッド電気自動車(1)は、還元剤たる尿素水溶液を加熱する手段(24)と、外気温度を検出する手段(17)と、バッテリ(11)の充電量を検出する手段(26)と、バッテリ(11)の充電モードを判定する手段(26)と、外気温度が所定温度未満である場合に、バッテリの充電量が所定充電量未満であり、且つ、第1の充電モード(通常充電モード)が選択されている場合には、充電モードを第2の充電モード(急速充電モード)に切り替えると共に、加熱手段を作動する手段(26)とを備える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジントルクばらつきがあるような場合でも、エンジン回転数変動を抑制しつつ所望の発電量を実現することである。
【解決手段】統合コントローラ20は、モータ回転数制御を行いつつモータジェネレータにより発電を行う場合には、min{(モータ下限トルク+エンジントルクばらつき),0}<目標発電トルク<max{(モータ上限トルク−エンジントルクばらつき),0}で示される関係式の範囲に設定する。そして、統合コントローラ20は、この関係式が成立しないことを条件に、モータ回転数制御からエンジン回転数制御に切り替える。
(もっと読む)
車両用走行制御装置
【課題】クルーズ走行などの自動走行に移行する際に、運転者に与える違和感を抑えることを可能とする。
【解決手段】運転者によるステアリングスイッチ28の操作によって定速走行に移行する際に、エンジン停止の処理中若しくはエンジン停止処理に移行したと判定すると、EVモードに移行することなく、エンジンを運転状態に復帰させる処理を行う。
(もっと読む)
ハイブリッド車両の制御装置
【課題】モータジェネレータの回転数低下を抑制することができるハイブリッド車両の制御装置を提供すること。
【解決手段】モータスリップ走行制御とエンジン使用スリップ走行制御とを切り換える際に、モータジェネレータMGの出力可能トルクの上限値から第2締結要素CL2のスリップ締結を維持するための差分トルクを差し引いた値を第2締結要素CL2の目標伝達トルク容量に設定するようにした。
(もっと読む)
車両の駆動力制御装置
【課題】車両の駆動力制御装置において、運転者によるアクセル操作の負担を軽減してドライバビリティの向上を可能とすると共に燃費の悪化を抑制可能とする。
【解決手段】エンジン11とモータジェネレータ14との駆動力を駆動輪16に伝達可能なハイブリッド車両にて、エンジン11の駆動力により車両を走行可能なエンジン走行モードとモータジェネレータ14の駆動力により車両を走行可能なEV走行モードとを切替可能であり、また、アクセル開度に基づいてモータジェネレータ14が駆動力を出力する力行区間と回生制動させる回生区間と駆動力及び回生制動のない惰性走行区間とに切替可能であり、運転者による惰性走行区間への切替意図を検出してから惰性走行区間を通過して力行区間または回生区間へ移行した頻度に基づいて惰性走行区間の領域を変更する。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】ハイブリッド車両の自動走行制御時において、エンジンの駆動力による発電時の発電量の急激な変動によって発生する速度変動を抑えることを可能とする。
【解決手段】駆動輪7L,7Rに駆動力を伝達する駆動源としてエンジン1及びモータジェネレータ2を有するハイブリッド車両の走行状態を、ステアリングスイッチで設定された目標走行状態で維持するように自動調整する制御であるオートクルーズ制御を行っているときに、モータジェネレータ2による発電においてエンジン1に要求する要求エンジン発電トルクの変化率の上限値を、通常走行制御時の上限値よりも小さい値に制限する制御を行う。
(もっと読む)
車両の駆動力制御装置
【課題】 アクセルオフによりドライブ走行からコースト走行へ移行する際のショックの緩和と空走感の抑制とを両立できる車両の駆動力制御装置を提供する。
【解決手段】 目標駆動力tFoを算出する目標駆動力演算部30と、推定駆動力Fo^を算出する実駆動力推定手段と、目標駆動力tFoと推定駆動力Fo^との偏差である駆動力偏差ΔFoが減少方向に変化している場合、目標駆動力tFoが所定のトルク閾値Fo_th未満のときには目標駆動力tFoがトルク閾値Fo_th以上のときよりも目標駆動力tFoの変化率を大きく制限する駆動力変化率制限部61と、を備えた。
(もっと読む)
ハイブリッド車両の制御装置自動車の発電制御
【課題】強制発電モードでありかつ減速コースト運転中である場合において特定の条件ではエンジンをフュエルカットすることとして燃費を向上させる。
【解決手段】強制発電モードでありかつ減速コースト運転中であると判定された場合に、エンジンをフュエルカットしたときバッテリから放電されるフュエルカット時バッテリ放電条件であるのか、それともエンジンをフュエルカットしたときバッテリに充電されるフュエルカット時バッテリ充電条件であるのかを判定し(S3)と、この判定結果よりフュエルカット時バッテリ放電条件であると判定された場合に作動状態のエンジンでモータジェネレータを連れ回しての発電を行わせ(S7、S8)、フュエルカット時バッテリ充電条件であると判定された場合にエンジンをフュエルカットする(S5、S6)。
(もっと読む)
ハイブリッド車両の制御装置
【課題】走行シーンにかかわらずエンジントルクを最良燃費点に維持して燃費の悪化を抑制する。
【解決手段】動力源としてエンジン及びモータジェネレータを備えるハイブリッド車両の制御装置であって、ドライバの要求駆動トルクを実現するように目標エンジントルク及び目標モータジェネレータトルクを算出する目標トルク算出手段(S1、S2)と、目標モータジェネレータトルクに遅れ処理を施して、エンジントルクの変化速度に従うようにモータジェネレータトルクの変化速度を所定の上限値に制限する遅れ処理手段(S7、S10)と、要求駆動トルクが増加し、発電量を減少させる方向へ目標モータジェネレータトルクが変化したときは、上限値を大きくする遅れ処理補正手段(S8)と、を備えることを特徴とする。
(もっと読む)
車両の制御装置
【課題】摩擦係合要素状態のばらつきに拘らず、駆動源回転数の吹け上がりを抑制することができる車両の制御装置を提供する。
【解決手段】本発明の車両の制御装置は、駆動源制御手段(図11)により、駆動源(エンジン)1からの出力トルクを制御するトルク指令値を、伝達容量検出手段(CL1ストロークセンサ)16により検出された摩擦係合要素(第1クラッチ)4における伝達トルク容量を超えない値に設定する。
(もっと読む)
車両用エンジン始動制御装置
【課題】エンジン始動要求から所定時間でエンジン始動を完了させるために過不足のない最適なエンジン始動トルクを、エンジン始動開始直前におけるエンジンの回転停止位置毎のばらつきを考慮して最適に設定することができる車両用エンジン始動制御装置を提供する。
【解決手段】電動機走行中のエンジン始動時に電動機12から出力されるエンジン始動トルクTSを、そのエンジン始動トルクTSがエンジン14を始動させるための必要最小限の値となるように、エンジン始動開始直前におけるエンジン回転停止位置PBTDCに基づいて算出され、電動機走行中においては電動機12がエンジン始動トルクTS分の余力を残した状態で作動するように、電動機12の回転速度NMGに応じて出力トルク範囲が定められた電動機走行作動領域Aが設定される。
(もっと読む)
101 - 120 / 976
[ Back to top ]