
Fターム[5H115PU22]の内容
車両の電気的な推進・制動 (204,712) | 走行用駆動源 (21,653) | エンジン (11,973) | ハイブリッド型 (11,939) | クラッチにより切換るもの (976)
Fターム[5H115PU22]に分類される特許
121 - 140 / 976
ハイブリッド車両のオイルポンプ駆動装置
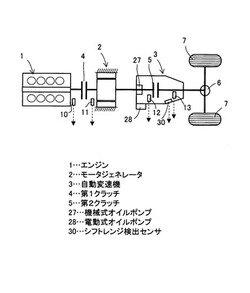
【課題】テストコース上とシャシダイナモメーター上とで同じ油量の作動油を供給し得るオイルポンプ駆動装置を提供する。
【解決手段】自動変速機(3)の入力軸で駆動され自動変速機(3)に作動油を供給する機械式オイルポンプ(27)と、作動指令により自動変速機(3)への作動油の供給を行い、非作動指令により自動変速機(3)への作動油の供給停止を行う電動式オイルポンプ(28)と、自動変速機(3)のシフトレンジを検出するシフトレンジ検出手段(30)と、シフトレンジ検出手段(30)が検出する自動変速機(3)のシフトレンジがニュートラルレンジである場合に、車速が低下して所定の閾値になる直前までモータジェネレータ(2)を駆動することによって機械式オイルポンプ(27)を作動し、電動式オイルポンプ(28)に対しては非作動指令を出力する制御手段とを備える。
(もっと読む)
ハイブリッド車両のアイドル制御装置

【課題】動力源から駆動輪に至る間の第2クラッチのスリップ締結の開始点を精度よく検知できるようにする。
【解決手段】動力源としてエンジンとモータ/ジェネレータとが第1クラッチを介して連結され、この動力源と駆動輪とが自動変速機内部の第2クラッチを介して接続されている。エンジンが動作しているアイドル運転中に、自動変速機をNレンジからDレンジへ切り換えると、第2クラッチが解放状態からスリップ締結へと遷移するが、そのスリップ締結の開始点Sがモータ/ジェネレータのトルク変化から検出される。本発明では、Dレンジへ切り換えられたときに、目標エンジントルクならびにモータ/ジェネレータの目標回転数の変更を禁止し、これらを一定に保持する。これらが外乱とならずにスリップ締結の開始点Sが精度良く検出される。
(もっと読む)
車両用走行制御装置
【課題】ハイブリッド車両において、実際のエンジントルクの変動に伴うエンジン停止・始動のハンチングを抑える。
【解決手段】目標とする走行状態が予め設定したエンジン停止判定値以下の場合には、エンジン1による駆動輪の駆動を停止する。このとき、目標エンジントルクと実際のエンジントルクとの間の推定される偏差に基づき、上記エンジン停止判定値を補正する。
(もっと読む)
電動車両の制御装置
【課題】クリープトルク制御中、車両が走行を開始してもクリープトルクの変動を抑えることで、走行フィーリングの悪化を防止する。
【解決手段】ハイブリッド車両の制御装置は、モータジェネレータと、車両停止判定手段と、補正用勾配演算手段と、目標クリープトルク演算手段と、を備える。モータジェネレータは、アクセル足離し操作時にタイヤに付与するクリープトルクを制御する。補正用勾配演算手段は、車両停止が判定されたとき、停止判定時の推定勾配をクリープトルクの補正用勾配として保存し、車両停止から走行へ移行しても所定時間を経過するまでは保存した補正用勾配の値を固定する。目標クリープトルク演算手段は、車速に基づく基本クリープトルクに、補正用勾配に基づく登坂時クリープトルク補正係数を掛け合わせることで目標クリープトルクを演算する。
(もっと読む)
ハイブリッド車両の制御装置、ハイブリッド車両の制御方法
【課題】クルーズ走行中に一時加速してから、再びクルーズ走行に復帰する際の違和感を抑制する。
【解決手段】クルーズ要求トルクTcがアクセル要求トルクTaよりも大きい状態から(S14の判定が“No”)、アクセル要求トルクTaがクルーズ要求トルクTcよりも大きくなり、一時加速した場合には(14Sの判定が“Yes”)、禁止フラグをFNG=1にセットし(S25)、許可フラグはFOK=0にリセットする(S26)。その後、運転者のアクセル操作が解除されても(S35の判定が“Yes”)、自車速がクルーズ要求トルクTcに従ったクルーズ要求車速に戻るまでは(S29の判定が“No”)、禁止フラグがFNG=1、及び許可フラグがFOK=0の状態を保持し、一時加速後のエンジンの停止を禁止する(S37)。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 エンジン始動前に電気走行モードからハイブリッド走行モードへのモード切り替え要求がキャンセルされた際の排気および運転性の悪化を抑制できるハイブリッド車両の制御装置を提供する。
【解決手段】 統合コントローラ20は、EVモードからHEV走行モードへのモード切り替え要求に伴うエンジン始動要求がなされた後、エンジン始動前に当該モード切り替え要求がキャンセルされた場合、既にエンジン回転数Neが上昇を開始しているとき、すなわちエンジン1がクランキング中であるときには、エンジン始動後にエンジン1を停止させる。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】定速走行制御時における頻繁なエンジンの始動・停止が行われるのを防ぐこと。
【解決手段】駆動輪7L,7Rに駆動力を伝達する駆動源としてエンジン1及びモータジェネレータ2を有するハイブリッド車両において、走行速度をステアリングスイッチで設定された目標速度を維持するように自動調整する定速走行制御を行っているとき、エンジン1の始動後モータジェネレータ2の駆動源であるバッテリが設定したクルーズ時SOC停止判定値に充電されるまでの間、エンジン1の停止を禁止する制御を行う。
(もっと読む)
車両用制御装置
【課題】摩擦締結要素を保護するための保護制御が行われ易い状態にあることを、ドライバに対して、適切に告知することのできる車両用制御装置を提供すること。
【解決手段】動力源10,20と駆動輪54との間に介装され、前記動力源と前記駆動輪とを断接する摩擦締結要素25を備える車両に対して制御信号を出力する車両用制御装置であって、前記摩擦締結要素の温度を検出する温度検出手段64と、前記摩擦締結要素の締結トルクを制御する締結トルク制御手段と、前記摩擦締結要素の温度が所定の第1温度以上である場合に、前記締結トルク制御手段を制御し、前記摩擦締結要素の前記締結トルクを、所定の周期で繰り返し変化させるトルク振動制御を行うトルク振動制御手段と、を備えることを特徴とする車両用制御装置を提供する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】走行モードの切り替えを適切に実施し、運転性を向上させる。
【解決手段】動力源としてのエンジン及びモータジェネレータと、電力源としてのバッテリと、を備えるハイブリッド車両の制御装置であって、アクセル操作量に基づいてアクセル操作速度を算出するアクセル操作速度算出手段(S7)と、アクセル操作量に遅れ処理を施した補正アクセル操作量を算出する補正アクセル操作量算出手段(S7)と、少なくとも蓄電量及び補正アクセル操作量に基づいて、EVモード、又は、HEVモードへの移行を要求する走行モード移行要求手段(S10)と、EVモードへの移行要求があったときに、アクセル操作速度がアクセルペダル踏み込み中と判定できる正のEVモード移行禁止速度よりも大きいときは、EVモードへの移行を禁止するEVモード移行禁止手段(S11)と、を備えることを特徴とする。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン1始動後のVTC装置31の進角動作に伴うトルクショックを抑制する。
【解決手段】動力源としてエンジン1とモータ/ジェネレータ5とが第1クラッチ6を介して連結され、モータ/ジェネレータ5と駆動輪2とが第2クラッチ7を介して接続されている。アイドルストップなどの際のエンジン1の始動は、第2クラッチ7をスリップ締結状態としつつ第1クラッチ6を接続することで行われ、最遅角位置にあったVTC装置31は始動後に進角動作する。低油温時など進角動作が第2クラッチ7の完全締結後に行われる場合には、目標VTC角度の変化速度を小さく制限し、ショックを抑制する。第2クラッチ7のスリップ締結中にVTC装置31の進角が可能であれば、最大変化速度で速やかに進角させる。
(もっと読む)
走行モード制御装置、ハイブリッド自動車、および走行モード制御方法、並びにプログラム
【課題】ハイブリッド自動車の運転感覚を運転者の好みに応じて適切に変更すること。
【解決手段】第1のシフトスケジュールが選択されたときは、電動機による走行時間がエンジンによる走行時間を上回るように制御して第1のシフトスケジュールを実行し、第2のシフトスケジュールが選択されたときには、エンジンによる走行時間が電動機による走行時間を下回らないように制御して第2のシフトスケジュールを実行する走行モード制御部を有するハイブリッド自動車を構成する。
(もっと読む)
車両用駆動装置
【課題】摩擦部材への供給油量を少なく抑えつつ、摩擦部材及び回転電機の双方を効率的に冷却できる車両用駆動装置を実現する。
【解決手段】内燃機関Eに駆動連結される入力部材Iと、車輪に駆動連結される出力部材と、入力部材Iと出力部材とを選択的に駆動連結する摩擦係合装置CLと、入力部材Iと出力部材とを結ぶ動力伝達経路上に設けられた回転電機MGと、を有する車両用駆動装置D。車両用駆動装置Dは、摩擦係合装置CLの摩擦部材27を少なくとも収容すると共に、内部が油で満たされる収容油室H2と、回転電機MGを収容する収容空間Sと、収容油室H2に油を供給する第一油路L1と、収容油室H2から油を排出する第二油路L2と、第二油路L2から排出された油を収容空間Sに供給する第三油路L3と、を備える。
(もっと読む)
ハイブリッド車両の始動制御装置
【課題】極低温時等のバッテリの内部抵抗が大きい状態でも、バッテリの消費電力量を少なくして、エンジンの始動ができるハイブリッド車両の始動制御装置を提供すること。
【解決手段】統合コントローラ20は、バッテリ温度センサ18で検出される温度が設定値よりも低い状態で前記エンジン1を始動制御する際に、エンジン回転センサ10がエンジン1の稼働を検出するまではモータジェネレータ2を低回転数で作動制御し、エンジン回転センサ10が前記エンジン1の稼働を検出した後はモータジェネレータ2を高回転数で作動制御するようになっている。
(もっと読む)
電動車両の制御装置
【課題】モータと駆動輪の間のトルク伝達を断接する摩擦係合要素における目標伝達トルク容量の補正精度を向上することができる電動車両の制御装置を提供すること。
【解決手段】本発明の電動車両の制御装置は、走行駆動源となるモータ(モータジェネレータ)2と駆動輪(タイヤ)7,7の間に介装され、モータ2と駆動輪7,7との間のトルク伝達を断接する摩擦係合要素(第2クラッチ)5における目標指令値(目標伝達トルク容量)を設定する際、補正量演算手段(補正量演算部)401Bにより、目標指令値の補正量を、摩擦係合要素5への入力トルク(推定モータトルク)が増大するほど大きな値に設定する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン始動時における第2クラッチの締結防止によるショック低減と、バッテリの劣化防止と、の両立を図ること。
【解決手段】ハイブリッド車両の制御装置は、エンジン1と、モータジェネレータ2と、第1クラッチ4と、第2クラッチ5と、バッテリ電力制限拡大制御手段(図12)と、を備える。モータジェネレータ2は、バッテリ8からの電力により駆動する。第1クラッチ4は、エンジンとモータジェネレータ2の間に介装され、モータジェネレータ2をスタータモータとするエンジン始動時に締結される。第2クラッチ5は、モータジェネレータ2とタイヤ7,7の間に介装され、エンジン始動時にスリップ締結される。バッテリ電力制限拡大制御手段(図12)は、エンジン始動時、最もモータトルクが必要な状態を含むエンジン始動領域を検知すると、通常時のバッテリ電力制限を一時的に拡大する電力制限拡大要求を出す。
(もっと読む)
坂道発進補助制御装置
【課題】坂道発進補助制御が無用に解除されることを防止できる坂道発進補助制御装置を提供する。
【解決手段】車両が登坂路で停止状態であるときにドライバーがブレーキペダルから足を放しても車両が後退しないように制御する後退防止制御部(S1)と、駆動輪に伝達される駆動トルクを、モータージェネレーターと駆動輪との間に配置される駆動輪側クラッチが解放され始めてから再び締結されて所定時間が経過するまでは駆動輪側クラッチの伝達トルクと変速機への入力トルクとのいずれか小さいトルクに基づいて推定し、所定時間が経過した後は変速機への入力トルクに基づいて推定するトルク推定部(S7,S8)と、推定された駆動トルクが後退防止判定値よりも大きいか否かを判定する判定部(S9)と、推定された駆動トルクが後退防止判定値よりも大きいときには後退防止制御部による制御の中止を許可する後退防止制御中止部(S10)と、を備える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】WSC走行モードからHEV走行モードへのモード遷移時に、摩擦要素の入力回転数の吹け上がりを抑制することができるハイブリッド車両の制御装置を提供すること。
【解決手段】本発明のハイブリッド車両の制御装置は、摩擦要素(第2クラッチ)CL2をスリップ締結し、摩擦要素CL2を介して伝達される駆動力で走行するエンジン使用スリップ走行モード(WSC走行モード)から、エンジンEngとモータMGの両方の駆動力で走行するハイブリッド車走行モード(HEV走行モード)へモード遷移を行う際、目標駆動トルク制御手段(第2フィルタ処理部)203によって、要求駆動トルクの変化に対して、目標駆動トルクの変化を制限するトルク制限制御を行う。
(もっと読む)
車両用走行制御装置
【課題】ハイブリッド車両において、実際のエンジントルクの変動に伴うエンジン停止・始動のハンチングを抑える。
【解決手段】目標とする走行状態が予め設定したエンジン停止判定値以下の場合には、エンジンによる駆動輪の駆動を停止する。このとき、目標エンジントルクと実際のエンジントルクとの間の推定される偏差に基づき、上記エンジン停止判定値を補正する。
(もっと読む)
車両の制動制御装置
【課題】 回生協調制御中にニュートラルレンジが選択された際のショックを抑制できる車両の制動制御装置を提供する。
【解決手段】 モータジェネレータMGおよび左右後輪RL,RR間に自動変速機ATを介在させ、車輪に摩擦制動トルクを付与するブレーキユニットBUと、モータジェネレータMGによる回生制動トルクと摩擦制動トルクとの和が車両の要求制動トルクとなるように回生制動トルクおよび摩擦制動トルクを制御する統合コントローラ10を備えた車両の制動制御装置において、統合コントローラ10は、自動変速機ATのマニュアルバルブからの油圧抜けが検出された場合、当該油圧抜けの速度に応じて回生制動トルクを低下させる。
(もっと読む)
ハイブリッド車両の制御装置、ハイブリッド車両の制御方法
【課題】クルーズ走行中に設定車速が増加し、その設定車速を達成するまでの違和感を抑制する。
【解決手段】モータ2のみを駆動し、EVモードでクルーズ走行している状態で、運転者のスイッチ操作によって設定車速Vsが増加したら(S11、S13、S16の全てが“Yes”)、禁止フラグをFNG=1にセットしてエンジン1の始動を禁止する(S29)。このとき、モータトルク上限値TLを増加補正する(S24、S25)。車速Vが設定車速Vsまで増加し(S28の判定が“No”)、且つクルーズ要求トルクTcが始動判定閾値TONより小さければ(S36の判定が“No”)、加速期間が終了したと判断して、モータトルク上限値TLを増加補正前の通常値に復帰させる(S31)。
(もっと読む)
121 - 140 / 976
[ Back to top ]