
Fターム[5H115SE04]の内容
車両の電気的な推進・制動 (204,712) | 主な制御対象 (12,865) | 電気機械 (3,767) | 発電機、電動機兼用のもの (1,643)
Fターム[5H115SE04]に分類される特許
141 - 160 / 1,643
ハイブリッド車両の制御装置
【課題】走行中、モータ走行モードによる走行領域を拡大し、回生エネルギーの回収量向上と燃費の向上を図ること。
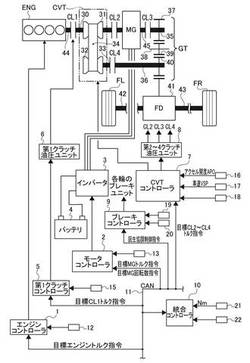
【解決手段】ハイブリッド車両の制御装置は、エンジンENGと、モータジェネレータMGと、プライマリプーリ31と、セカンダリプーリ32と、第1クラッチCL1と、第2クラッチCL2と、エンジン始動制御手段(図6)と、を備える。エンジン始動制御手段(図6)は、モータ走行モードからのエンジン始動時、第2クラッチCL2を開放してプライマリプーリ31およびセカンダリプーリ32をモータジェネレータMGから切り離した状態で、第1クラッチCL1を締結し、プライマリプーリ31およびセカンダリプーリ32に蓄積されたエネルギーを使ってエンジンENGを始動する。
(もっと読む)
電動車両の制御装置

【課題】回生協調ブレーキ制御時、旋回度合いに対応して車両挙動の安定性と回生量の確保との両立を図る。
【解決手段】電動車両の制御装置は、回生協調ブレーキ制御手段と、回生トルク制限手段S14→S15と、閾値決定手段S13と、を備える。回生トルク制限手段は、回生協調ブレーキ制御時、前後車輪速差が、決定された閾値より大きくなると回生トルクを制限する。閾値決定手段は、回生協調ブレーキ制御中における車両の旋回度合いを表す旋回状態量が、旋回度合いが高いことを表すほど前記閾値を下げた値に決定する。
(もっと読む)
ホイール式作業車両
【課題】前輪の駆動源に電動モータを用いることで、車両構成の簡素化を図り、組立性およびメンテナンス性を向上させるとともに、エンジン負荷の軽減を図ったホイール式作業車両を提供する。
【解決手段】車両前後に、左右の前輪23および後輪24を備え、車体フレーム22上に設置したエンジン40の動力を、ミッションケース42を介して後輪24に伝達するとともに、ステアリング操作により前輪23を操向して車両を旋回させ、前輪23の近傍位置には、バッテリー4の電力により駆動する電動モータ5を設置するとともに、この電動モータ5は、インバータIを介してコントローラCに接続し、後輪24の走行負荷状態や車両の旋回状態に基づいてコントローラCにより電動モータ5の駆動を制御して、前輪23を電動モータ5で駆動させる
(もっと読む)
電動車両の制御装置
【課題】回生協調制御による電費向上効果を最大限に生かしつつ、限界領域に近い走行シーンにおいて車両挙動の安定性を確保すること。
【解決手段】電動車両の制御装置は、回生協調ブレーキ制御手段としてモータコントローラ21およびブレーキコントローラ10と、舵角補正ステアリング制御手段として4WASコントローラ22と、車両挙動制御手段として車両コントローラ9と、を備える。車両コントローラ9は、回生協調ブレーキ制御時、車両挙動の乱れを補償するように、舵角補正ステアリング制御により舵角補正をした後、依然として車両挙動が不安定であると判断されたとき(図4のステップS6でNO)、回生協調ブレーキ制御による回生トルクを低下させる制御を行う(図4のステップS7,S8)。
(もっと読む)
電動機制御システム、発電機制御システム、及び電動発電機制御システム
【課題】モータジェネレータ2を効率の高い領域で動作させ、効率を向上させる。
【解決手段】駆動発電制御システム1の駆動発電制御ユニット8には、モータジェネレータ2の効率に基づいて設定された回転数Nと目標トルクTcとに対応する発生トルクTpが記憶される。発生トルクTpは、効率の高い運転領域又は当該運転領域の近傍のトルクである。駆動発電制御ユニット8は、回転数Nと目標トルクTcとに対応する発生トルクTpを決定して、発生トルクTpに対する目標トルクTcの割合に応じて、モータジェネレータ2が発生トルクTpを連続的又は間欠的に発生するように動作させる。これにより、モータジェネレータ2は、発生トルクTpを連続的又は間欠的に発生して車両の走行又は制動に必要な目標トルクTcをプロペラシャフト14に供給する。
(もっと読む)
ハイブリッド車の発電制御装置
【課題】所望の発電電力を設定できるハイブリッド車の発電制御装置を提供する。
【解決手段】エンジンとモータとを動力源とするハイブリッド車において、エンジンにより発電機を駆動し、発電機により発電した電気をバッテリに充電する際、エンジン及び発電機によるバッテリへの充電の開始後、パドルシフトの「+」レバーが押されたとき、発電電力を加算する設定を行い(S23→S24)、パドルシフトの「−」レバーが押されたとき、発電電力を減算する設定を行い(S23→S25→S26)、いずれも押されない場合、前回の発電電力を保持する設定を行い(S23→S25→S27)、設定した発電電力でバッテリへの充電を行う。
(もっと読む)
ハイブリッド車の発電制御装置
【課題】所望の時間内に所定の充電率まで充電することができるハイブリッド車の発電制御装置を提供する。
【解決手段】エンジンとモータとを動力源とするハイブリッド車において、エンジンにより発電機を駆動し、発電機により発電した電気をバッテリに充電する際、エンジン及び発電機によるバッテリへの充電の開始後、パドルシフトの「+」レバーが押されたとき、発電時間を加算する設定を行い(S23→S24)、パドルシフトの「−」レバーが押されたとき、発電時間を減算する設定を行い(S23→S25→S26)、いずれも押されない場合、前回の発電時間を保持する設定を行い(S23→S25→S27)、設定した発電時間でバッテリへの充電を行う。
(もっと読む)
変速制御装置
【課題】回生トルクがかかっている際の掛け替え変速において発生しうる戻し変速における変速ショックを回避する技術の実現。
【解決手段】第1の変速段から第2の変速段への変速指令があった後、第1の変速段へ戻す戻し変速指令があった場合に、変速プロセスの進行による入力部材の回転速度の変化が所定の回転変化しきい値未満の範囲では、駆動力源の負方向の出力トルクの絶対値が所定の判定しきい値以上である負トルク状態であることを条件として、第1の変速段への戻し変速プロセスが禁止される。
(もっと読む)
ハイブリッド車
【課題】浄化装置の浄化触媒の暖機要求がなされているときにおいて、内燃機関での燃焼が安定しにくくなるなどの不都合を抑制する。
【解決手段】浄化触媒の暖機要求時において、触媒温度Tcが閾値Tcref未満のときには、第1所定運転ポイント(回転数Ne1およびトルクTe1)でエンジンを継続して運転しながら走行用パワーPdrv*に基づくパワーによって走行するようエンジンと二つのモータとを制御し(S150,S250〜S290)、触媒温度Tcが閾値Tcref以上のときには、第1所定運転ポイントに比してエンジンからの出力が大きくなる範囲内の第2所定運転ポイント(回転数Ne2およびトルクTe2)でエンジンを継続して運転しながら走行用パワーPdrv*に基づくパワーによって走行するようエンジンと二つのモータとを制御する(S160〜S200,S250〜S290)。
(もっと読む)
回転電機冷却ユニット
【課題】回転電機冷却ユニットにおいて、回転電機をより有効に冷却できる構成を実現することである。
【解決手段】回転電機であるモータジェネレータを収容するハウジングと、ポンプと、ノズル付孔部34を有するノズルユニット24とを備える。ノズル付孔部34は、大径孔部44と、大径孔部44の下流側に連続し、スリット状断面を有し、少なくとも大径孔部44との連続部の断面積が大径孔部44の断面積よりも小さくなったスリット状ノズル46とを含み、スリット状ノズル46の開口端から油を下側に噴出可能とする。
(もっと読む)
ハイブリッド車両用制御装置
【課題】限られた状況に対応するための高い冷却性能を電動機に備えなくても、電動機の温度が上限温度を超えることを抑制して適切に電動機を保護する制御を行うことができるハイブリッド車両用制御装置を実現する。
【解決手段】電動機Mの状態が予め定められたゼロトルク制御実行条件を満たす場合に電動機Mの出力トルクをゼロにするゼロトルク制御を行うゼロトルク制御部13と、電動機Mの状態が、当該電動機Mの温度が所定の上限温度に達する可能性がある特定昇温状態であることを判定する昇温判定部15と、電動機Mのゼロトルク制御が実行されており、且つ昇温判定部15により特定昇温状態であることが判定されたことを条件として、発電機Gに発電を行わせて蓄電装置B1を充電し、電源電圧を上昇させる電圧上昇制御を行う電圧上昇制御部17と、を備える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ハイブリッド車両において、クラッチを用いた動力伝達モードの切替えを好適に行う。
【解決手段】ハイブリッド車両の制御装置(100)は、第1電動機(MG1)、第2電動機(MG2)及び内燃機関(200)を含む動力要素と、駆動軸(500)と、第1回転要素(S1)、第2回転要素(R1)、第3回転要素(C1)を有する動力伝達機構(300)と、第1クラッチ(710)と、第2クラッチ(720)とを備えたハイブリッド車両を制御する。ハイブリッド車両の制御装置は、第1クラッチ及び第2クラッチを制御する切替手段(160)と、第2クラッチを結合させる第1制御手段(120)と、内燃機関の回転数を推定する回転数推定手段(130)と、推定された回転数が所定の閾値未満である場合に、内燃機関が起動していない状態で第1クラッチを結合させる第2制御手段(140)とを備える。
(もっと読む)
車両の制御装置
【課題】差動回転機構の所定の回転要素を確実に制動した状態で内燃機関を始動することが可能な車両の制御装置を提供する。
【解決手段】キャリアCaに内燃機関11が、サンギヤSuに第1MG12が、リングギヤRiに出力部19がそれぞれ連結された遊星歯車機構16を備えた駆動装置10が搭載された車両1に適用される制御装置において、駆動制御装置40は、所定の始動条件が成立した場合、リングギヤRiと出力部19との間の動力伝達が阻止されるとともにリングギヤRiが制動されるようにドグクラッチ機構17を制御し、次に第1MG12が所定の出力トルクで動作するように第1MG12の動作を制御し、その後所定の出力トルクで動作するように制御されている第1MG12の角速度の変化が所定の許容範囲内の場合に内燃機関11が始動されるように第1MG12の動作を制御する。
(もっと読む)
車両用制動装置
【課題】回生制動による制動力を状況に応じて変えるとともに、車両の運動エネルギを好適に電気エネルギに変換できる車両用制動装置を提供することを課題とする。
【解決手段】走行用モータ3の減速比を変更可能な変速機4aを有するハイブリッド車両HVに備わり、ブレーキペダルの操作量に応じて設定される目標制動力に基づいてブレーキアシスト制御する車両用制動装置1とする。そして、走行用モータ3を回生制御して回生制動力を発生する回生ブレーキと、油圧で作動するブレーキ作動部Brで摩擦制動力を発生する油圧ブレーキと、を備え、ブレーキアシスト制御の開始条件が成立したとき、車両用制動装置1は、回生制動力が低下するように減速比を設定した後で減速比の変更を停止し、回生制動力と摩擦制動力で目標制動力を発生することを特徴とする。
(もっと読む)
車両用動力伝達装置
【課題】遊星歯車機構を利用してエンジンの減速比と電気モータの減速比を制御する技術において、エンジンの減速比と電気モータの減速比の対応関係を可変とする。
【解決手段】エンジン1の発生する動力が第1遊星歯車機構Peのキャリアに入力され、モータMGの発生する動力が第2遊星歯車機構Pmのサンギアに入力され、第1遊星歯車機構Peのリングギアおよび第2遊星歯車機構Pmのキャリアからの動力を結合して車両の駆動輪の車軸に伝達し、エンジン1の動力が第1遊星歯車機構Peのキャリアに入力される状態を保ちながら、第1遊星歯車機構Peのサンギアの回転を第1クラッチC1、第2クラッチC2、第1ブレーキB1のいずれかで規制し、また、モータMGの動力が第2遊星歯車機構Pmのサンギアに入力される状態を保ちながら、第2遊星歯車機構Pmのリングギアの回転を第2ブレーキB2、第3クラッチC3のいずれかで規制する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジンの始動/停止制御と自動変速機の変速制御のうち、一方の制御中に他方の制御要求があったとき、ショックを防止するだけでなく、ラグ・燃費への跳ね返りを最小限に抑えること。
【解決手段】ハイブリッド車両の制御装置は、エンジンEngと、モータ/ジェネレータMGと、第1クラッチCL1と、自動変速機ATと、統合コントローラ10と、ATコントローラ7と、エンジン/変速協調制御手段(図6)と、を備える。エンジン/変速協調制御手段は、エンジン始動/停止制御と自動変速機ATの変速制御のうち、一方の制御中に他方の制御要求があったとき、要求タイミングで他方の制御を開始してもショックが許容値を越えない場合、要求タイミングで他方の制御を開始し、要求タイミングで他方の制御を開始するとショックが許容値を越える場合、他方の制御を許可できるタイミングまで待って他方の制御を開始する。
(もっと読む)
車両の動力伝達制御装置
【課題】AMT付ハイブリッド車両において、電動機駆動トルクのアシストを利用しながらシフトアップ作動が行われる際の電動機駆動に伴う消費電力を小さくすること。
【解決手段】内燃機関駆動トルクTeが駆動輪に伝達されながら車両が走行する状態において、シフトアップ条件が成立したことに基づいて(t1)、Te及びクラッチトルクTcが減少させられ且つ電動機駆動トルクTmが増大させられる。その後、Tcがゼロになったことに基づいて(t2)、Tcをゼロに維持し且つTmが駆動輪に伝達される状態を維持しながら、シフトアップ作動が行われる(t2〜t3)。その後、シフトアップ作動が終了したことに基づいて(t3)、Te及びTcが増大させられ且つTmが減少させられる(t3〜t5)。シフトアップ条件の成立後、Tcがゼロになるまでの間(t1〜t2)、内燃機関の出力軸により回転駆動される発電機の負荷トルクTsを発生させる。
(もっと読む)
車載内燃機関制御装置
【課題】車両走行中の機関始動に伴って運転者に与えられる違和感を軽減することのできる車載内燃機関制御装置を提供する。
【解決手段】車両1は、駆動輪7を回転させる動力源として内燃機関3及び第2のモータジェネレータMG2を備える。電子制御装置20は、車両走行中に機関始動を行なうに際して、車両の要求駆動力TRQが所定値TRQth以下であるときには、マウント11の変形度合が所定度合以下であると推定して、当該機関始動の2サイクル目の燃料噴射量Q2を1サイクル目の燃料噴射量Q1に対して大きく設定する(Q2>Q1)。一方、車両の要求駆動力TRQが所定値TRQthよりも大きいときには、マウント11の変形度合が所定度合よりも大きいと推定して、当該機関始動の1サイクル目の燃料噴射量Q1を2サイクル目の燃料噴射量Q2に対して大きく設定する(Q1>Q2)。
(もっと読む)
車両の制御装置
【課題】従来よりも車両の振動を抑制することが可能な車両の制御装置を提供する。
【解決手段】内燃機関3と、内燃機関3のクランク軸3cと連結されたインプットシャフト8を回転駆動可能に設けられた第1MG4とを備えた車両1に適用され、駆動制御装置20は、内燃機関3にてクランク軸3cに生じる抵抗トルクを打ち消すべく内燃機関3のクランク角度と回転数に基づいてFF補正値を算出するとともにインプットシャフト8のトルク変動を抑制すべくインプットシャフト8のトルクに基づいてFB補正値を算出し、その後それらFF補正値及びFB補正値に基づいて第1MG4の出力トルクを算出し、算出した出力トルクで第1MG4が動作するように第1MG4を制御する。
(もっと読む)
ハイブリッド車両
【課題】冷機始動時に排気中のエミッション低減を行う処理が行われているか否かの診断を広範囲で実施する。
【解決手段】冷機始動時に、触媒7を速やかに活性化しつつその過程で生じるエミッションを少なくするような始動時目標トルクを算出し、エンジン1の実際のトルクができるだけ始動時目標トルクとなるようにしつつ、車両に要求される駆動力トルクを満足するようにエンジン目標トルクとモータ目標トルクとを決定する始動時排気ガス制御を行ない、始動時目標トルクと、エンジン指令トルクとを比較して、始動時排気ガス制御の機能診断を行う。これにより始動時排気ガス制御の実施中であれば、始動時目標トルクとエンジン指令トルクとの比較は可能なので、冷機始動時の広い範囲で始動時排気ガス制御の機能診断を実施可能となる。
(もっと読む)
141 - 160 / 1,643
[ Back to top ]