
Fターム[5H115TO02]の内容
車両の電気的な推進・制動 (204,712) | その他の検出 (15,876) | 加速度、減速度検出 (712)
Fターム[5H115TO02]に分類される特許
141 - 160 / 712
車両用制動システム
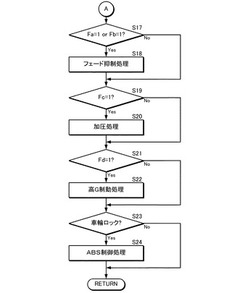
【課題】 サービスブレーキのフェードやベーパロックを抑制した車両用制動システムを提供する。
【解決手段】 制動ECU41は、ステップS17で降坂フラグFaとフェードフラグFbとの少なくとも一方が1であるか否かを判定し、この判定がYesであればステップS18でフェード抑制処理を実行する。次に、制動ECU41は、ステップS19で加圧フラグFcが1であるか否かを判定し、この判定がYesであればステップS20で加圧処理を実行する。次に、制動ECU41は、ステップS21で加圧フラグFcが1であるか否かを判定し、この判定がYesであればステップS22で高G制動処理を実行する。
(もっと読む)
充電状態報知装置およびナビゲーション装置

【課題】車両の走行の動力源となるバッテリを充電する際に、充電開始後にユーザが車両を離れた場合であっても、目標とする蓄電量が実現したことをユーザに明確に通知すると共に、その通知のために要する電力を低減する。
【解決手段】バッテリへの充電時に車両の主電源がオフになった場合、制御部49がスリープモードに移行し、比較部48は、バッテリの現在の蓄電量が目標蓄電量以上となったか否かを判定する。また、バッテリの現在の蓄電量が目標蓄電量以上となったと比較部48が判定すると、比較部48が制御部49をスリープモードからアクティブモードに移行させ、制御部49は、アクティブモードに移行したことに基づいて、通信部45を制御して、バッテリの蓄電量が目標蓄電量に到達したことをユーザ端末に通知する。
(もっと読む)
ハイブリッド型産業車両
【課題】車両の減速時に、減速度を制限することなくバッテリ状態により変化するバッテリ充電電力制限超過を抑制する。
【解決手段】ECU19は、アクセルポジションセンサ20及びブレーキセンサ21の検出信号に基づいて要求減速度を演算し、要求減速度に基づいて走行電力を演算する。また、走行電力及びバッテリ13の充電電力に基づいて減速度ベース要求発電電力を演算し、走行モータ14の使用電力及びバッテリ13の充電電力に基づいて実電力ベース要求発電電力を演算する。そして、演算された減速度ベース要求発電電力と、実電力ベース要求発電電力とから決定した総合発電電力にて発電モータ12を制御する。ECU19は、発電電力制御時に、エンジン11の回転数を荷役レバーポジションセンサ23の検出信号に基づいて演算される荷役要求エンジン回転数以上となるように制御する。
(もっと読む)
電動機制御方法及び電動機制御装置
【課題】空転滑走した軸とは異なる他軸における空転滑走の誘発を抑制させ、牽引力増大を図るための新たな方策を提案すること。
【解決手段】監視軸の軸速度Vから基準速度Vmを減算した速度差Vdが予兆時誘発検出閾値Vca以上となったことを検出する(誘発検出)。予兆時誘発検出閾値Vcaは、空転滑走検出閾値Vsより小さい値であり、時刻t5の時点で予兆時誘発検出がなされる。また、再粘着制御において、一旦引き下げた電動機トルクτeをもとのトルク(或いはもとのトルクをもとに定められる目標トルク)に復帰させる際にも、軸重移動が生じて他軸での空転滑走が誘発し得る。そこで、空転滑走を検出した時のトルク分電流から現在のトルク分電流を減算したトルク分電流の差が、復帰直前時誘発検出閾値τcr以下となったことを、他軸における空転発送の誘発可能性ありとして検出する(誘発検出)。
(もっと読む)
倒立振子型移動体の電装部品冷却装置
【課題】倒立振子型移動体における制御装置に用いられる送風ファンによる冷却性能を向上する。
【解決手段】移動体1の前進時の走行風を取り入れる通気孔39Aを有し、前進時の走行風による流入風の流れ方向に送風する送風ファン247を設け、流入風Wとファン送風F1,F2とを合わせて、基板243,244のパワー素子243a,244aの発熱を冷却する。前後左右移動および停止時を判別し、送風ファンの回転速度を、左右・停止時には前進時より高くし、後進時にはさらに高くする。前進時以外での流入風の減少に対しては送風ファンの回転速度を高めて常に良好な冷却性を確保し得る。また、走行風の最も少ない取り込み量に基づいて送風ファンの能力を設定した場合に対して、必要最小限の能力となる小型の送風ファンを用いることができる。
(もっと読む)
走行車システムと走行車への非接触給電方法
【課題】 非接触給電線を流れる電流のジュール熱による消費電力を減らす。
【構成】 地上側に電源と非接触給電線とを設けると共に、走行車に非接触給電線から受電する受電ユニットと、電力を消費する負荷と、受電ユニットからの電力を蓄電すると共に、負荷に電力を供給する蓄電ユニットを設ける。さらに、蓄電ユニットの蓄電量と負荷の所要エネルギーとを把握すると共に、前記蓄電ユニットの蓄電量により前記負荷の所要エネルギーをまかなえる際に、電源から非接触給電線への給電を停止するための制御手段を設ける。
(もっと読む)
倒立振子型車両
【課題】床面の姿勢に応じた形態で安定に動作することができる車両を提供する。
【解決手段】本発明の車両1によれば、車両1の向きまたはその変化率を用いて、2次元床傾斜の「過去推定値」および「瞬時暫定値」のうち少なくとも一方が座標変換されることにより、2次元床傾斜の過去推定値および瞬時暫定値の座標系が一致させられる。そして、2次元床傾斜の過去推定値および瞬時暫定値を用いて、重み付き平均値またはローパスフィルタ値が算出されることにより、2次元床傾斜の新たな推定値が算出される。
(もっと読む)
倒立振子型車両の制御装置
【課題】空転検知可能な移動動作部の構成の限定が少なく、検知可能な空転の限定が少ない空転検知を行なうことが可能な倒立振子型車両の制御装置を提供する。
【解決手段】制御ユニット50は、基体9の傾斜角速度の測定値θbdot_xyz_sに基づいて、車両1の重心速度Vb_xy_exp1を推定すると共に、基体9の傾斜角速度の計測値θbdot_xy_sに基づいて、車両1の重心速度Vb_xy_exp2を推定する。そして、制御ユニット50は、これら推測値の差Vb_xy_difに基づいて、車輪体5の空転発生を検知する。
(もっと読む)
安全装置
【課題】容易に作動確認を行うことができる安全装置を提供す。
【解決手段】支持基盤12に接点端子24、26が回転ドラム14の周方向に離れて配置される共に、回転ドラム14の周面14Aに、接点端子24、26の配置位置に対応して周方向に少なくとも接点端子24、26の間隔分の導電部30が設けられ、接点端子24、26子と周面14Aを接触させた状態で回転ドラム14を周方向へ回転させて、接点端子24、26子と導電部30と接触させることにより通電、非通電の切り替えを行う。
(もっと読む)
ハイブリッド自動車およびその制御方法
【課題】内燃機関の始動時のエミッションの悪化を抑制すると共に始動直後に高負荷かつ高回転で内燃機関が運転されても十分に潤滑されるようにする。
【解決手段】ハイブリッド自動車がシステム起動され、電動走行優先モードによりエンジンが始動されることなく電動走行により走行しているときに、エンジン水温Twが閾値Twref以上で車速Vが閾値Vref以上であるか加速度αの絶対値が閾値αref以上のときにモータMG1を駆動制御して燃料噴射も点火も行なうことなくエンジンを逆回転方向にモータリングする(S220,S240〜S280)。これにより、燃料噴射弁からの油密漏れによって燃料が漏れていても、その漏れた燃料を吸気系に戻し、エンジンの始動時におけるエミッションが悪化するのを抑制することができ、潤滑オイルによるエンジンの潤滑が行なえる状態とすることができる。
(もっと読む)
ハイブリッド自動車の変速制御装置
【課題】トランスミッションに装備した動力取出軸と電動機とを接続したハイブリッド自動車の変速制御装置に関し、電動機を利用した走行中のトランスミッションの変速時に、電動機の駆動タイミングを早めることができるようにする。
【解決手段】変速要求が検出されると、主クラッチ4及び副クラッチ22を切断した上で、変速制御手段40dにより所望の変速段への変速を行なうと共に、同期制御手段40fにより内燃機関回転速度を変速機入力軸の回転速度に同期させ且つ電動機回転速度を変速機従動軸の回転速度に同期させてから、クラッチ制御手段40eにより主クラッチ4及び副クラッチ22を同時に接続するように変速制御手段40dにより制御する。
(もっと読む)
車両の制動力制御装置
【課題】コーナーを走行する際のブレーキコントロール性を向上させる。
【解決手段】エネルギー回生に伴う反力と摩擦力とを制動力として車輪に作用させることのできる車両の制動力制御装置において、旋回中の制動力のうち前記エネルギー回生で発生させるべき制動力の最低の割合を前記旋回中の横力の関数として予め定めておくとともに、旋回中に制動要求があった場合のエネルギー回生による制動力を、要求されている制動力に対する割合が前記最低の割合以上となるように求め、その求められたエネルギー回生による制動力となるようにエネルギー回生を行うとともに、要求されている制動力のうち前記エネルギー回生による制動力以外の残余の制動力を前記摩擦力によって生じさせるように構成されている。
(もっと読む)
電気車駆動システム
【課題】アクティブサスペンションや軸ばねの可変特性といったハードウェアの追加や変更が不要で、車体の振動乗り心地を改善する手法が必要である。また、電動台車で容易に実現できる手法が望ましい。
【解決手段】車輪を有する台車の上に車体が搭載された電気車であり、台車に装荷された電動機が歯車を内蔵した駆動装置を介して車輪を駆動することにより走行する電気車両において、電動機のトルクにより車体の振動抑制制御を行う。また、台車振動を電動機の回転速度から演算した情報をもとに電動機のトルクにより台車振動を抑制し、間接的に車体の振動の抑制を行う。
(もっと読む)
協調制御装置
【課題】高度な協調制御が可能な協調制御装置を提供する。
【解決手段】複数の制御対象を協調制御する協調制御装置は、一対の出力制御系と、一対の交差回路と、伝達関数部とを具備する。一対の出力制御系は、それぞれ制御回路部を有する一対の制御対象に対して設けられる。一対の交差回路は、出力制御系の制御回路部の一方の入力側から他方の出力側へ、及び他方の入力側から一方の出力側へ設けられる。伝達関数部は、一対の交差回路にそれぞれ設けられる。
(もっと読む)
車両およびその制御方法
【課題】内燃機関からのパワーを十分に用いて発進する。
【解決手段】所定勾配θref以上の登坂路で発進する際に、発進前のブレーキオンによる停車時には、エンジンから出力するパワーを増加したときにエンジンの回転数Neを上昇させるのに要するパワーのためにエンジンから出力するトルクが減少しない範囲として設定された発進前目標運転領域内でバッテリの入力制限Winに相当するパワーを出力する運転ポイントでエンジンを運転し、ブレーキオフされたときからは、エンジンの発進前目標運転領域内でのトルクの増加を伴って要求トルクTr*に基づく要求パワーPe*がエンジンから出力されると共に要求トルクTr*が駆動軸としてのリングギヤ軸に出力されるよう制御する。これにより、エンジンからのパワーを十分に用いて発進することができる。
(もっと読む)
車両のモータトラクション制御装置
【課題】 モータトラクション制御時、部品保護とスタビリティの確保との両立を図ることができる車両のモータトラクション制御装置を提供すること。
【解決手段】 駆動輪を駆動する動力源に装備された少なくとも1つのモータと、駆動輪の駆動スリップを検出し、モータトルクダウン制御により駆動輪のグリップを回復させるモータトラクション制御手段と、を備えた車両のモータトラクション制御装置において、前記モータトラクション制御手段は、部品保護のための第1トルクダウン量を演算する部品保護制御部と、車両挙動を安定させるための第2トルクダウン量を演算するスタビリティ制御部と、を有し、第1トルクダウン量と第2トルクダウン量のうち大きい方を制御目標トルクダウン量として選択すると共に、部品保護制御部が優先して選択されているとき、第2トルクダウン量の方が第1トルクダウン量よりも大きい場合には、優先順位を無視して第2トルクダウン量を制御目標トルクダウン量として選択する手段とした。
(もっと読む)
車両用制御装置
【課題】摩擦係数の変化による係合要素の伝達トルク容量の変動を抑制して、出力部材に伝達されるトルク変動を抑制することができる車両用制御装置を提供する。
【解決手段】回転電機に駆動連結される入力部材と、車輪に駆動連結される出力部材と、複数の係合要素を備えると共に複数の変速段を切替可能に備える変速装置と、を備えた車両用駆動装置を制御対象とし、複数の係合要素の係合及び解放を制御することにより、トルク相Ptを経て行われる変速段の切り替えを制御する車両用制御装置。変速動作中のトルク相Ptの終了を判定する相判定手段と、トルク相Ptの終了判定後、入力部材の目標回転速度変化率に基づく変化量だけ変速段の切替方向に応じて回転電機のトルクを増加又は減少させる回転電機制御手段と、入力部材の回転速度変化率が目標回転速度変化率となるように係合側要素への供給油圧をフィードバック制御する係合制御手段と、を備える。
(もっと読む)
車両用駆動装置
【課題】モータ走行中における制動力を利用して効率的に発電を行なうことが可能な車両用駆動装置を提供する。
【解決手段】5th EVモードから3rd EVモードへとシフトダウンする際、第1変速用シフター51を第5速用接続位置でインギヤした状態から第3速用接続位置でインギヤする間の制動力の抜けを車輪ブレーキB1〜B4で補うように回生ブレーキと車輪ブレーキB1〜B4を協調制御することで確保する。
(もっと読む)
タイヤ状態推定装置
【課題】タイヤ状態を精度よく推定する。
【解決手段】タイヤすべり角を推定するタイヤすべり角推定手段500と、タイヤすべり角の前回値、タイヤすべり率及びタイヤ縦力に応じてタイヤ力最大値を推定するタイヤ力最大値推定手段300と、を有し、タイヤすべり角推定手段500は、タイヤ力最大値、タイヤすべり率、タイヤ縦力及び車両状態測定値に基づいてタイヤすべり角を推定する。これによって、タイヤ状態を精度よく推定することができる。
(もっと読む)
電動車両用制御装置、並びに、これを備えた電動車両及びフォークリフト
【課題】高い振動減衰率を有すると共に、加速性能を維持した電動車両用制御装置、並びに、これを備えた電動車両及びフォークリフトを提供する。
【解決手段】駆動タイヤ及び車軸を有する車体と前記駆動タイヤにトルクを付与する駆動モータMとを備える電動車両F1に用いられ、駆動モータMに対してモータ制御指令T*を供給する電動車両用制御装置1であって、前記車軸を中心とした前記電動車両F1の上下振動を示す振動パラメータによって駆動モータMをフィードバック制御することを特徴とする。
(もっと読む)
141 - 160 / 712
[ Back to top ]