
Fターム[5H115TO02]の内容
車両の電気的な推進・制動 (204,712) | その他の検出 (15,876) | 加速度、減速度検出 (712)
Fターム[5H115TO02]に分類される特許
61 - 80 / 712
車両の制御システム
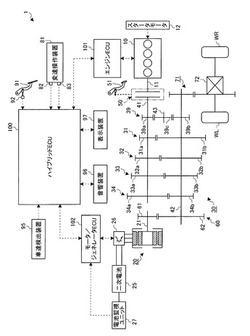
【課題】EV走行モードからの切り替えを運転者に対して十分に促すこと。
【解決手段】エンジン10の動力を用いたエンジン走行モード、モータ/ジェネレータ20の動力を用いたEV走行モード、又はエンジン10及びモータ/ジェネレータ20の双方の動力を用いたハイブリッド走行モード、を運転者に手動で選択させる走行モード選択装置と、運転者が走行モード選択装置によりEV走行モードを選択した際の車速に応じてモータ/ジェネレータ20の出力特性を設定し、モータ/ジェネレータ20よりもエンジン10の運転効率の方が優れているときに当該モータ/ジェネレータ20からの出力を抑制又は禁止するハイブリッドECU100及びモータ/ジェネレータECU102と、を備えること。
(もっと読む)
案内軌条式鉄道用モニタリング方法及び装置

【課題】 台車や案内輪の劣化を推定できるようにする。
【解決手段】 案内アーム4に設けたロードセル13より入力される案内輪5の荷重信号について、時刻歴応答波形を求め、現時点より過去一定時間までの最大値又はRMS値を求めて、それを或るサンプリング回数分記憶する。記憶してある最大値又はRMS値の平均値を求めて、案内軌条式鉄道の車両納入当初のときに同様にして得た平均値との変化量を求め、その変化量が或るしきい値よりも大となると、表示装置にエラーを表示させて、このエラー表示により案内輪5や案内軌条7の長期的な劣化を推定できるようにする。更に、記憶してある最大値又はRMS値の平均値に対し、次にサンプリングされた最大値又はRMS値の変化量が、別に設定して或るしきい値よりも大となるときにもエラーを表示させ、このエラー表示により案内輪5の急な損傷や案内軌条7の局所的な損傷を推定できるようにさせる。
(もっと読む)
車体振動推定装置
【課題】車輪速情報を用いて車体振動を常に高精度に推定し得る車体振動推定装置を提案する。
【解決手段】演算部31,32で平均前輪速VwF=(VwFL+VwFR)/2および平均後輪速VwR=(VwRL+VwRR)/2を演算し、VwF, VwRをバンドパスフィルタ処理部33,34に通して、車体共振周波数付近の成分のみを抽出して取り出し、前輪速VwFの車体共振周波数近傍振動成分fVwFおよび後輪速VwRの車体共振周波数近傍振動成分fVwRを取得する。演算部35,36では、fVwF, fVwRから前輪の前後方向変位Xtfおよび後輪の前後方向変位Xtrを求め、前輪および後輪の前後変位および上下変位間における固有の関係を基に、Xtf, Xtrから、前軸上方部の上下変位および後軸上方部の上下変位を求め、これら車体前後の上下変位から車体振動(上下バウンス速度dZv、ピッチ角速度dθp)を推定する。
(もっと読む)
車体振動推定装置およびこれを用いた車体制振制御装置
【課題】外乱ロバスト性に優れた高精度な推定が可能な車体振動推定装置を提供する。
【解決手段】演算部31,32で求めた前輪速VwFおよび後輪速VwRをバンドパスフィルタ33,34に通し、車体振動を表す車体共振周波数近傍振動成分fVwF,fVwRを抽出する。演算部35,36で、fVwF, fVwRから車体振動を表す前輪の前後方向変位Xtfおよび後輪の前後方向変位Xtrを求め、車体振動に起因した前軸上方車体部の上下変位および後軸上方車体部の上下変位を求め、これらから車体の上下バウンス速度dZvおよびピッチ角速度dθpを算出する。推定器25bではdZv,dθpをオブザーバ入力とし、制駆動トルクrTdから車両モデル37を用いた状態推定を行うことにより、車体の上下バウンス量fZv、上下バウンス速度dfZv、ピッチ角fθp、ピッチ角速度dfθpを推定する。
(もっと読む)
車両用動力伝達装置用制御装置
【課題】差動機構を高回転化から保護しつつエンジントルク低下を補うことが可能な車両用動力伝達装置用制御装置を提供する。
【解決手段】許容回転速度設定手段96は、所定の加速操作量OPAC及びエンジン回転速度Neのときにエンジン14から出力されるエンジントルクTeが、エンジン14の出力トルク特性を示す予め設定された関係から上記所定の加速操作量OPAC及びエンジン回転速度Neに基づいて定まる基準エンジントルクTesよりも低いと判断された場合には、そうでない場合と比較して、差動機構である第1遊星歯車装置20の許容入力回転速度N1inを高く設定する。従って、許容入力回転速度N1inの制限によって第1遊星歯車装置20を高回転化から保護することが可能であると共に、許容入力回転速度N1inの変更に応じてエンジン回転速度Neを引き上げてエンジントルクTeを上昇させエンジントルク低下を補うことが可能となる。
(もっと読む)
変速制御装置
【課題】回生トルクがかかっている際の掛け替え変速において発生しうる戻し変速における変速ショックを回避する技術の実現。
【解決手段】第1の変速段から第2の変速段への変速指令があった後、第1の変速段へ戻す戻し変速指令があった場合に、変速プロセスの進行による入力部材の回転速度の変化が所定の回転変化しきい値未満の範囲では、駆動力源の負方向の出力トルクの絶対値が所定の判定しきい値以上である負トルク状態であることを条件として、第1の変速段への戻し変速プロセスが禁止される。
(もっと読む)
車両用駆動装置の制御装置
【課題】無段変速機および有段変速機を共に変速する場合でもそれ等の変速が何れも適切に行われるようにする。
【解決手段】無段変速機16を構成している差動機構24の2つの回転要素RE1、RE3の回転速度、すなわちエンジン回転速度NeおよびMG2回転速度NMG2を制御量として、それ等の最終目標値Nem、NMG2mに向かうように変速中の過渡目標値Net、NMG2tが逐次設定され、エンジン回転速度Ne、MG2回転速度NMG2が過渡目標値Net、NMG2tに近付くように第1モータジェネレータMG1、第2モータジェネレータMG2のトルクTMG1、TMG2がフィードバック制御される。変速過渡時のエンジントルクTeの変化や有段変速機20の摩擦係合装置の係合トルクの変化、両変速機16、20の変速の相互干渉などは外乱としてフィードバック制御に反映され、両変速機16、20の変速が何れも適切に行われるようになる。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】走行用電動機による回生を伴う自動変速機のコーストダウンシフトが実行される際、走行用電動機が負トルクダウンを実行不可と判定されたときであっても、その負トルクダウンを適切に実行して変速ショックを抑制する。
【解決手段】自動変速機18のダウンシフトの際に蓄電装置26の出力制限により第2電動機MG2が負トルクダウンを実行不可と判定された場合には、負トルクダウンの実行により不足する蓄電装置26の電力量が第2電動機MG2による目標回生量WMG2*として算出され、ダウンシフトの開始前に第2電動機MG2による回生量WMG2が目標回生量WMG2*分増加させられ、ダウンシフトの開始後に負トルクダウンが実行されるので、ダウンシフトの進行に合わせて第2電動機MG2による回生トルクTMG2を減少させることができ、ダウンシフト時に出力軸トルクTOUTの落ち込み(減速トルクの増大)を抑制することができる。
(もっと読む)
ハイブリッド車両
【課題】冷機始動時に排気中のエミッション低減を行う処理が行われているか否かの診断を広範囲で実施する。
【解決手段】冷機始動時に、触媒7を速やかに活性化しつつその過程で生じるエミッションを少なくするような始動時目標トルクを算出し、エンジン1の実際のトルクができるだけ始動時目標トルクとなるようにしつつ、車両に要求される駆動力トルクを満足するようにエンジン目標トルクとモータ目標トルクとを決定する始動時排気ガス制御を行ない、始動時目標トルクと、エンジン指令トルクとを比較して、始動時排気ガス制御の機能診断を行う。これにより始動時排気ガス制御の実施中であれば、始動時目標トルクとエンジン指令トルクとの比較は可能なので、冷機始動時の広い範囲で始動時排気ガス制御の機能診断を実施可能となる。
(もっと読む)
運転支援装置
【課題】走行計画を立案することなく、かつ、燃費向上効果の向上を図る。
【解決手段】車両の走行先に存在する予め定められた領域における道路状況、現在の車両状況および過去の操作状況の少なくとも1つに関する情報を取得し、これらの情報に基づいて車両の走行先で車両の燃費の悪化を招くことになるか否かを予測し、車両の燃費の悪化を招くことになると予測された場合、車両の燃費を向上するための操作が車両の乗員に事前に報知する。
(もっと読む)
列車モニタ・データ伝送システムを有する列車制御装置
【課題】常に編成全体として粘着限界値に近いトルクを発生させて粘着力の有効利用を図ることができる列車制御装置を提供すること。
【解決手段】先頭電動車の電気車制御装置B1で空転あるいは滑走を最初に検知すると、そのときの接線力係数Muj(B1)を推定し、この接線力係数と、先頭車から後方の車両における粘着係数の増大量データDeltaMujと、期待粘着係数Muz_expt等をもとに、各電気車制御装置B1,Ajにおける空車時のトルク指令値上限値Taujmaxz_aを求め、列車モニタ・データ伝送システム1を介して各電気車制御装置に対して伝送する。各電気車制御装置B1,Ajでは、上記トルク指令値上限値Taujmaxz_aから実際に発生すべきトルク指令値上限値Taujmax_actを求め、これを目標値として、各電気車制御装置の制御対象範囲の電動機でトルクを制御する。
(もっと読む)
車両の制御装置
【課題】登坂路での車両の後退を防止する。
【解決手段】電気自動車は、駆動源としての電動モータと、電動モータに電気的に接続されたバッテリスタックとを有する。バッテリスタックの残存容量が大きいほど、絶対値が小さくなるように、バッテリスタックの充電電力の制限値WINが算出される。バッテリスタックの充電電力の絶対値が、制限値WINの絶対値以下になるように制限される。制限値WINの絶対値が小さいほど、クリープトルクの絶対値が大きくなるように電動モータが制御される。
(もっと読む)
車両の電力変換装置およびそれを備える車両
【課題】車両の衝突等が発生した場合に、電力変換装置内に設けられるコンデンサの残留電荷を速やかに放電させるとともに確実かつ十分に放電させる車両の電力変換装置を提供する。
【解決手段】放電制御部30は、衝突検知部60により車両100の衝突が検知されたとき、コンデンサC1,C2の残留電荷を放電させる放電制御を実行する。バックアップ電源装置40は、電力変換装置の筐体50内に設けられ、筐体50の外部から放電制御部30へ動作電力を供給する電源線の異常時に、放電制御部30へ動作電力を供給する。バックアップ電源装置40は、正極線PL2および負極線NLに接続され、正極線PL2から受ける電力を電圧変換して放電制御部30へ出力する。
(もっと読む)
車両の制御装置
【課題】走行抵抗の急低下を早期タイミングにより高精度に検出することで、駆動力を抑制する制御の制御開始タイミングの遅れを防止できる車両の制御装置を提供する。
【解決手段】電気自動車1は、走行抵抗演算部12と、走行抵抗急低下判断部14aと、電子コントロールユニット5と、を備えた。走行抵抗演算部12は、車両走行中、外乱による走行抵抗推定値FDを検出する。走行抵抗急低下判断部14aは、走行抵抗推定値FDの時間変化率と車両加速度の積分要素(車速または車両駆動力)に基づいて、車両走行中、走行抵抗の急低下を検出する。電子コントロールユニット5は、走行抵抗急低下判断部14aにより走行抵抗の急低下を検出したとき、タイヤへ加える駆動力抑制と制動力増加の少なくとも一方による制御を開始する。
(もっと読む)
電気自動車およびプログラム
【課題】2つの電気モータのうち一方の電気モータの機能が停止しても、安定した走行が可能な電気自動車およびプログラムを提供する。
【解決手段】第1および第2の電気モータ3f、3rから出力された制駆動力を左右への動力配分制御が可能は差動装置4f、4rを介して前輪側および後輪側の左右輪に伝達する第1および第2の駆動系を有する電気自動車1において、車両25の前後方向、横方向、旋回方向の加速度を検出する加速度センサ26と、電気モータから制駆動力を出力することができない障害の発生を検出する障害検出部と、障害検出部が障害の発生を検出したとき、加速度センサ26が検出した前後方向、横方向、旋回方向の加速度からそれぞれの加速度変化率を求め、それらの加速度変化率のうち最も大きい加速度変化率に対応する方向の加速度が障害の発生前の値となるように障害の発生していない側の第1又は第2の駆動系を制御する制御部とを備える。
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保し、旋回性能を改善することができる電気自動車およびプログラムを提供する。
【解決手段】この電気自動車1は、前輪側の左右輪に第1の差動装置4fを介して制駆動力を伝達する第1の電気モータ3fと、後輪側の左右輪に第2の差動装置4rを介して制駆動力を伝達する第2の電気モータ3rと、第1および第2の電気モータ3f、3rの制駆動力を制御する制御部とを備え、第1および第2の差動装置4f、4rは、制御部により左右への動力配分率が制御可能な構成を有する。
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保することが容易にできる電気自動車およびプログラムを提供する。
【解決手段】前後輪2を差動装置4を介して独立に駆動する2つの電気モータ3を有する電気自動車1において、車体25の少なくとも旋回加速度を検出する加速度センサ25と、各車輪2のスリップ率を演算するスリップ率演算手段と、操舵角を検出する操舵角センサ29と、旋回加速度が操舵角に応じた旋回加速度となるように各車輪のスリップ率が所定の値を超えない範囲で電気モータ3の制駆動力を制御する制駆動力制御手段とを備える。
(もっと読む)
駆動制御装置
【課題】 車両の走行状態に応じて適切に旋回することができる駆動制御装置を提供すること。
【解決手段】 第1規範ヨーレイト算出手段8a4によって、横加速度センサ32で検出された加速度に応じて第1規範ヨーレイトが算出され、第2規範ヨーレイト算出手段8a5によって、横加速度推定手段8a3で推定した加速度に応じて第2規範ヨーレイトが算出される。横加速度推定手段8a3は、操舵角と走行速度に基づいて加速度を推定する。走行速度と操舵角とに応じて規範ヨーレイト選択手段8a6によって選択された規範ヨーレイトと走行速度とに基づいて、基準差回転算出手段8a7によって基準差回転が算出される。制御手段8a1によって、実差回転と基準差回転との偏差に応じて差回転設定機構Tを制御する。
(もっと読む)
駆動制御装置
【課題】変速時に電動機と駆動輪との間に設けられたクラッチが無駄に動作することを抑制可能な駆動制御装置を提供する。
【解決手段】MG3と駆動輪24との間の動力伝達経路中に設けられたMGクラッチ30を備え、内燃機関2と駆動輪24との間に設けられた変速機10の動作を制御することにより複数の変速段に変速可能な駆動装置1Aに適用される駆動制御装置において、ニュートラル位置Nを含むシフトパターンを移動可能に設けられたシフトレバー51を有するシフト操作装置50を備え、シフトレバー51がニュートラル位置Nにあっても駆動装置1Aに対して運転者から変速が要求されていると判定した場合にはMGクラッチ30が解放状態に切り替わることを禁止する。
(もっと読む)
列車制御装置
【課題】自列車の位置を正確に検出できない路線においても、勾配のある区間で速度を目標速度バンド内に精度よく保って走行する。
【解決手段】本発明の一実施例に係る列車制御装置は、現在の列車速度をサンプリングして、加減速度を演算する加減速度演算部15と、前記加減速度及びノッチ特性に基づいて、走行路の勾配抵抗を求め、前記勾配抵抗及びノッチ特性を用いて所定時間後の列車速度を予測する速度予測部17と、所定時間後の列車速度が速度追従バンド内に収まるよう、ノッチ指令を決定するノッチ指令決定部18とを具備する。
(もっと読む)
61 - 80 / 712
[ Back to top ]