
Fターム[5H115TO13]の内容
車両の電気的な推進・制動 (204,712) | その他の検出 (15,876) | 電気的変量検出 (4,425) | 電圧 (1,703)
Fターム[5H115TO13]に分類される特許
161 - 180 / 1,703
車両用電源装置
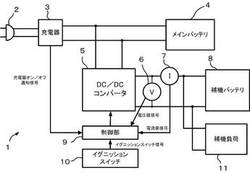
【課題】車両外部からメインバッテリに充電が行われているときに、補機バッテリの蓄電量の判定を誤ることなく、補機バッテリへ十分な充電が行える車両用電源装置を提供する。
【解決手段】車両外部から充電が可能なメインバッテリ4と、メインバッテリ4の出力電圧を降圧して出力するDC/DCコンバータ5と、DC/DCコンバータ5の出力電圧によって充電されるとともに補機負荷11に電力を供給する補機バッテリ8と、DC/DCコンバータ5を制御する制御部9とを備え、制御部9は、車両外部かメインバッテリ4に充電が行われているとき、DC/DCコンバータ5の出力する電流が所定の電流上限値を越えないように制御する。
(もっと読む)
燃料タンク内の温度算出システム

【課題】燃料電池車両に搭載された燃料タンク内の温度を、精度良く算出可能とする。
【解決手段】燃料タンク内の温度を算出するに際し、燃料タンク内の温度が外気温度と等しくなるときの外気温度センサによって検出される外気温度Txに加え、燃料充填終了時の燃料タンク内の温度予測値Tyを算出し、上述した外気温度Txとこの温度予測値Tyとに基づいて、タンク温度センサの出力特性を補償する。前記温度予測値は、前記温度センサによって検出された燃料充填前の燃料タンク内の温度と、充填情報取得手段によって取得された燃料ガスの温度と充填流量と、充填時間と、に基づいて算出される。
(もっと読む)
回転機の制御装置
【課題】コンデンサとインバータとの間の電気経路を開閉するリレーが開状態とされる状況下、モータジェネレータの通電制御によってコンデンサの充電電圧を規定電圧以下に放電する際、モータジェネレータが回転し続けることを防止する。
【解決手段】指令電流設定部30によって設定される指令電流idr,iqrは、固定座標変換部50によってαβ座標系に変換された後、β成分の符号が反転され、回転座標変換部54によってdq座標系に変換される。これにより、dq変換部54の出力は、指令電流設定部30によって設定される指令電流idr,iqrをα軸に対して線対称変換したものとなる。放電制御に際しては、対称変換された指令電流にフィードバック制御される。
(もっと読む)
電動車両における放電制御装置
【課題】バッテリが蓄えることができる電力量の算出精度を向上させる電動車両の放電制御装置を提供する。
【解決手段】電動二輪車の放電制御装置100は、メインバッテリ18と、メインバッテリ18から供給される電力に基づいて駆動するモータ16と、モータ16以外の負荷であって、メインバッテリ18からの電力を消費する灯火器と、メインバッテリ18の残存容量を判定するBMU104と、モータ16及び前記灯火器に電力を供給するために、メインバッテリ18の放電制御を行うBMU104及び制御部114とを備え、BMU104及び制御部114は、残存容量が零になる値よりも高い閾値なるまではメインバッテリ18の放電を許可し、外部の診断機からメインバッテリ18の劣化状態を診断するための指示を受けた場合は、残存容量が零に至るまでメインバッテリ18の放電を行い、その後満充電になるまで充電させて充電可能容量を判定する。
(もっと読む)
電気自動車
【課題】モータの意図しないトルク変動を防止することが可能な電気自動車を提供する。
【解決手段】電気自動車10は、インバータ26の上アーム素子84u、84v、84wが全てオンであり且つ下アーム素子90u、90v、90wが全てオフである、又は上アーム素子84u、84v、84wが全てオフであり且つ下アーム素子90u、90v、90wが全てオンである3相短絡状態において、スイッチ24a、24bを切り替える制御装置50を有する。
(もっと読む)
蓄電手段劣化推定方法及び電源装置,鉄道車両
【課題】蓄電手段の抵抗劣化を簡便に精度よく推定し、蓄電手段の交換時期を的確に把握すると共に蓄電手段を過負荷にさせず安定した動作を実現する。
【解決手段】あらかじめ運転方法が決定されている鉄道車両の路線走行時の蓄電手段の電流,表面温度,電圧,環境温度を記録し、最大電圧と最小電圧の差ΔVを初期値ΔViniと比較し、閾値ΔVthとの比較で劣化を算出し、制御に劣化を反映させると共に運転台に劣化度と点検警告の表示をする。
(もっと読む)
制御装置
【課題】複数の制御対象を制御するための処理の増加に対して柔軟に対応可能な制御装置を提供すること。
【解決手段】 複数の制御対象を制御する制御装置は、複数の制御対象の入出力電力に応じて、複数の制御対象を制御するための各処理の優先度を決定する優先度決定部と、単位時間中に行われると推定される複数の制御対象の各処理に要する合計時間の総和に応じて、複数の制御対象の少なくともいずれか1つの処理を省略するか否かを決定する処理省略決定部と、処理省略決定部によって処理を省略すると決定された場合、優先度決定部が決定した優先度に基づいて、複数の制御対象の内、どの制御対象の処理を省略するかを決定する省略処理決定部とを備える。
(もっと読む)
車両用の電源装置
【課題】簡単な回路構成で車両の走行状態においてグランドラインの断線を検出する。
【解決手段】車両用の電源装置は、プラス側とマイナス側の電池ブロックを抵抗素子19を介して直列に接続し、抵抗素子19の一端を基準グランド点8A、他端をサブグランド点8Bとしている走行用バッテリ1の電池モジュール2の電圧を電圧検出回路3で検出する。電圧検出回路3は、基準グランド点8Aに対して非対称な抵抗分圧回路11を備える。車両用の電源装置は、電圧検出回路が、車両の走行状態において、基準グランド点8Aに対するサブグランド点8Bの電圧を走行状態電圧として検出し、断線検出回路20が、検出された走行状態電圧を、車両の非走行状態における基準グランド点8Aに対するサブグランド点8Bの基準電圧に比較し、検出される走行状態電圧が基準電圧に対してあらかじめ設定している設定電圧範囲外にある状態でグランドライン9が断線されたと判定する。
(もっと読む)
ハイブリッド型建設機械における制御システム
【課題】ハイブリッド型建設機械において、蓄電装置と発電機とのロスをトータルで改善できる制御システムを構築する。
【解決手段】制御システムを構成する制御装置27において、蓄電装置34の充電量が満充電範囲SOCfullでないことの判断に基づいて、エンジン12および発電機13を駆動する構成とし、エンジン12および発電機13の駆動時では、発電機13の出力が作業ダイヤル43で設定された出力値となるよう発電機13に制御指令を出力する一方、発電機13が前記出力値を発電機効率の高い状態で出力する回転数となるようエンジン12に制御指令を出力する構成とする。
(もっと読む)
ハイブリッド車の回生制御装置
【課題】ハイブリッド車の回生制御装置に関し、走行用バッテリの充電が困難な場合にも、回生制動を制限することなく確実に実施することができるようにする。
【解決手段】走行駆動が要求されると駆動輪を駆動する一方で、回生駆動が要求されると回生制動を行なって発電電力を発生する走行用モータ1と、エンジンに連結されてエンジンによる回転力で発電するモータジェネレータ3と、走行用モータ1への電力供給を行なう走行用バッテリ7と、走行用バッテリ7への充電を規制すべきか否かを判定する判定手段11とを備えたハイブリッド車であって、判定手段11により走行用バッテリ7への充電を規制すべきであると判定された際に、回生制動による発電電力を用いてモータジェネレータ3を作動させてエンジンを駆動させるように制御する制御手段とをそなえる。
(もっと読む)
車両の電源装置
【課題】電気負荷に直列に接続可能な複数の電池の正極および負極にそれぞれ対応するように設けられた複数のリレーの溶着を適切に判定する。
【解決手段】ECUは、駆動システムの起動要求があった場合、リレーR2はオフ状態のままでSMR1のプリチャージ回路に含まれるリレーR1をオンさせ、リレーR1,R2を除くリレーR3〜R5のうちのいずれか1つのリレーを判定対象としてオフさせ残りのリレーをオンさせる。ECUは、電圧VLが所定値V0よりも大きい場合に、判定対象のリレーが溶着していると判定する。ECUは、判定対象のリレーをリレーR3〜R5の間で順次切り替え、リレーR3〜R5の溶着の有無を順次判定する。
(もっと読む)
電力装置
【課題】高圧電力機器および高圧バッテリが接続された高圧電力ラインからの電力を電圧変換して低圧電力機器および低圧バッテリが接続された低圧電力ラインに供給するDC/DCコンバータの異常をより適正に検出する。
【解決手段】平滑コンデンサ35のディスチャージ制御の実行中にDC/DCコンバータ28を少なくとも所定時間だけ駆動制御する。そして、ディスチャージ制御が実行されている最中にDC/DCコンバータ28が駆動されているときの平滑コンデンサ35の端子間電圧Vcの変化の傾きが予め定められた正常範囲内であるときにはDC/DCコンバータ28は正常であると判定し、ディスチャージ制御が実行されている最中にDC/DCコンバータ28が駆動されているときの端子間電圧Vcの変化の傾きが正常範囲外であるときにはDC/DCコンバータ28に異常が発生していると判定する。
(もっと読む)
過電圧抑制装置及びモータ駆動装置
【課題】部品の追加を招くことなく、モータの回生電力によるバッテリあるいは制御装置の電圧上昇を抑制する。
【解決手段】モータ10により生成された電力をバッテリEに回生するモータ駆動装置における過電圧を抑制する過電圧抑制装置において、回生電圧を検出するインバータ電圧検出回路4Cと、検出した回生電圧と、バッテリEの電圧しきい値と、を比較し、回生電圧が電圧しきい値を超えた場合に、モータ10を力行方向に対して逆方向に駆動する駆動回路4と、を備える。
(もっと読む)
車両の駐車支援装置およびそれを備える電動車両
【課題】車両の外部を撮影する撮影装置による送電ユニットの認識精度を向上させて給電設備に対する車両の駐車精度を向上させる。
【解決手段】車両100の制御装置は、給電設備200と車両100との間の距離がL1よりも大きいとき、カメラ120によって撮影される画像に基づいて給電設備200の駐車枠を認識し、上記の距離がL1以下になると、送電ユニット220の側面の画像に基づいて送電ユニット220を認識し、さらに上記の距離がL2(<L1)以下になると、送電ユニット220の上面の画像に基づいて送電ユニット220を認識する。そして、制御装置は、これらの認識結果に基づいて駐車支援制御を実行する。
(もっと読む)
ハイブリッド車の制御装置
【課題】ハイブリッド車において、ドライブフィーリングの悪化を招くことなくエンジンを可能な限り最高効率点近傍で運転させてエネルギ効率の向上を図る。
【解決手段】駆動トルクを出力可能な走行用モータ1F及びエンジン2と、エンジン2により駆動されるジェネレータ3と、ジェネレータ3の発電電力で充電され走行用モータ1Fへの電力供給を行なうバッテリ7とを備え、車両の必要トルクに基づいてエンジン2及び走行用モータ1Fへの要求出力トルクを設定するトルク設定手段11と、トルク判定手段12により設定されたエンジン2への要求出力トルクがエンジン2の最高効率点でのエンジン出力トルクよりも小さいと判定されるとエンジン2への要求出力トルクよりも大きなエンジン出力トルクを発生させて、エンジン出力トルクの要求出力トルクに対する余剰トルクによってジェネレータ3を駆動してバッテリ7を充電する制御手段13,15とを備える。
(もっと読む)
充電制御装置及び方法
【課題】充電ケーブルがSAE規格に適合したものであるか否かを判定できる充電制御装置及び方法を提供する。
【解決手段】車両EVの充電インレットE1に接続された充電ケーブルCCが規格に適合しているか否かを判定したのち充電を制御する方法であって、前記充電ケーブルが前記充電インレットに接続されてから、前記車両の電力供給ラインE8のメインスイッチE5,E6が投入されるまでの間に、前記充電ケーブルから制御信号が送信されたか否か及び前記充電ケーブルから電力が供給されたか否かを検出するステップと、少なくとも前記制御信号が検出されず且つ前記電力が検出された場合は、前記充電ケーブルを規格不適合と判定するステップと、前記充電ケーブルが規格不適合と判定された場合は、前記充電ケーブルによる充電を禁止又は充電電流を制限するステップと、を有する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 ハイブリッド車両に設けられるモータのアシスト機能及び回生機能を利用して、圧縮着火運転モードと火花点火運転モードの切換頻度を抑制することができるハイブリッド車両の制御装置を提供する。
【解決手段】 圧縮着火運転モード(動作点P0)において、要求運転モードが火花点火運転モードに変化したとき(Pdmd)は、エンジン要求トルクTQENGdmdをHCCI上側トルクTQhcciHiに設定する(P1)とともに、モータ要求トルクTQMOTdmdを、要求トルクTQdmdとエンジン要求トルクTQENGdmdの差分(TQdmd−TQENGdmd)に設定し、圧縮着火運転モードを維持する。
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保することが容易にできる電気自動車およびプログラムを提供する。
【解決手段】前後輪2を差動装置4を介して独立に駆動する2つの電気モータ3を有する電気自動車1において、車体25の少なくとも旋回加速度を検出する加速度センサ25と、各車輪2のスリップ率を演算するスリップ率演算手段と、操舵角を検出する操舵角センサ29と、旋回加速度が操舵角に応じた旋回加速度となるように各車輪のスリップ率が所定の値を超えない範囲で電気モータ3の制駆動力を制御する制駆動力制御手段とを備える。
(もっと読む)
ハイブリッド自動車およびその制御方法
【課題】内燃機関を運転している最中に走行モードを切り替えたときに生じ得る内燃機関の運転ポイントの急変を抑制する。
【解決手段】エンジンを運転して走行している最中に走行モードが切り替えられたときには、レートリミット処理により充放電要求パワーPb*を緩変化させて設定する(S750〜S800)。そして、充放電要求パワーPb*と走行用パワーとの和としてエンジン要求パワーを設定し、エンジン要求パワーを動作ラインに適用して得られる運転ポイントでエンジンが運転されると共に走行用パワーで走行するようエンジンと二つのモータとを制御する。充放電要求パワーPb*が緩変化することにより、エンジン要求パワーも緩変化するから、エンジンの運転ポイントの急変を抑制することができる。
(もっと読む)
共鳴型非接触受電装置の位置決め支援装置および共鳴型非接触受電装置の位置決め方法
【課題】ワイヤレスでの受電状態の良好さの程度を精度良く検出し、位置決めすることが可能な共鳴型非接触受電装置の位置決め支援装置を提供する。
【解決手段】制御装置180は、自己共振コイル112の位置の検出開始後の初期段階に、位相検波器116で測定した測定値をメモリ181に記録し、メモリ181に記録した測定値に対して現在位相検波器116で測定した測定値の符号が反転するまで初期段階よりも自己共振コイルの位置を目標方向に移動させるための制御を実行し、位相検波器116で測定した測定値の符号が反転してから受電電圧センサ190で測定した受電電圧VRに基づいて自己共振コイル112の位置合わせを行なうための制御を実行する。
(もっと読む)
161 - 180 / 1,703
[ Back to top ]