
Fターム[5H180EE02]の内容
交通制御システム (133,182) | 交通情報一般の収集、処理、表示 (3,206) | 解析・予測、シミュレーション・モデリング (713)
Fターム[5H180EE02]の下位に属するFターム
交通流とその分配に関するもの (128)
Fターム[5H180EE02]に分類される特許
141 - 160 / 585
船舶動静予測方法及びシステム
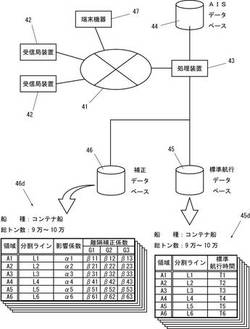
【課題】船舶の目的地の到着予想時間をリアルタイムに提供する船舶動静予測方法及びシステムを提供する。
【解決手段】本発明の船舶動静予測システムは、AIS情報を受信するとともに電気通信回線41により配信可能な受信局装置42と、受信局装置42と電気通信回線41を介して接続された処理装置43と、を備え、処理装置43は、AISデータベース44を構築し、船舶Sが所定の目的地まで航行する海域を複数の領域A1〜A6に区画し、AIS情報を用いて領域A1〜A6ごとに標準航行情報45dを作成して標準航行データベース45を構築し、AIS情報を用いて標準航行情報45dを所定の条件で修正する補正テーブル46dを作成して補正データベース46を構築し、AIS情報により船舶Sの進入領域A4を検出し、進入領域A4に対応した標準航行情報45d及び補正テーブル46dを用いて船舶Sの目的地Dまでの到着予想時間ETAを算出する。
(もっと読む)
干渉評価方法、装置、およびプログラム

【課題】現実として起こりうる状況下においても安全性の確保を図ることができる干渉評価方法、装置、およびプログラムを提供する。
【解決手段】複数の物体の位置と各物体の速度を含む内部状態とを少なくとも記憶する記憶手段を備えたコンピュータが、前記複数の物体の位置および内部状態を前記記憶手段から読み出し、この読み出した前記物体の位置および内部状態に基づいて、前記複数の物体の各々が時間の経過とともに取りうる位置の変化を時間および空間から構成される時空間上での軌跡としてそれぞれ生成し、この生成した軌跡を用いることによって前記複数の物体の進路の確率的な予測をそれぞれ行い、この予測した結果に基づいて、前記時空間上で前記特定の物体が取りうる軌跡と前記その他の物体が取りうる軌跡との干渉の程度を定量的に示す干渉度を算出する。
(もっと読む)
車両運転支援装置及び運転支援システム
【課題】信号機のある交差点における運転支援を適切に行うことができる運転支援装置を提供する。
【解決手段】路側に配置され、車両4が停止する停止位置を決定する運転支援装置2であって、信号機手前の所定の地点を通過した通過車両4A,4Bの車両状態量を取得する路側受信部21と、車両状態量と通過車両4A,4Bが向かう信号機60の信号情報とに基づいて、通過車両4A,4Bの後続車両4の停止位置Ut、Ugを決定する目標停止位置決定部23、及び基準停止位置更新部26とを備えて構成することで、車両4が交差点72に到着する際に交差点72で信号待ちしている通過車両4A,4Bが存在するか否かを予測することができるため、車両4が停止する停止位置Ut、Ugを適切に決定することができる。
(もっと読む)
経路探索装置、交通シミュレーション装置、歩行者挙動予測装置、及びプログラム
【課題】歩行者が現実に選択する経路を探索することができるようにする。
【解決手段】経路候補生成手段によって、地図情報に基づいて、歩行者の出発地から目的地までの経路の候補を複数生成する。そして、算出手段によって、歩行者の移動場所の複数の種類の各々に対して予め定められた移動するときの危険度に基づいて、経路生成手段によって生成された経路の候補の各々について、経路の候補上に存在する移動場所の種類に応じた総危険度を算出する。従って、経路の候補の各々の危険度を考慮して、経路を選択することができるため、歩行者が現実に選択する経路を探索することができる。
(もっと読む)
検出装置および方法、並びに、プログラム
【課題】車両の制御に必要な情報を、状況に応じて効率よく検出する。
【解決手段】想定状況選択部143は、状況情報入力I/F回路141を介して、状況情報取得部111から取得した状況情報、および、想定状況選択テーブル171に基づいて、予め想定されている複数の想定状況の中から、自車が置かれている状況に最も近い想定状況を選択する。検出処理選択部151は、選択された想定状況、および、検出処理選択テーブル172に基づいて、対象検出部145の各検出部が実行することができる検出処理の中から、実際に実行する検出処理を選択する。本発明は、車載用の画像処理装置に適用できる。
(もっと読む)
交通信号制御装置及び交通信号制御方法
【課題】自律分散型の交通信号制御において、渋滞の発生を検出し、検出した渋滞の発生に応じた適切な信号制御を実現すること。
【解決手段】自律分散型の交通信号制御装置20は、自交差点の各流入路の判定地点それぞれについて、当該判定地点に設置された車両感知器40からの感知結果信号(時間占有率)に基づく渋滞の発生有無の検出を行うとともに、該当する流入路の予測した交通流に基づく渋滞の発生有無の推定を行い、これらの検出結果及び推定結果をもとに、当該判定地点における渋滞の発生有無を判定する。そして、判定地点それぞれの判定結果の組合せに予め対応付けて定められている渋滞時用パラメータに、信号制御パラメータを変更する。
(もっと読む)
経路算出装置、経路算出システム、および経路算出方法
【課題】経路算出時の計算量を抑制しながら、ユーザにとって利便性の高い経路情報を提供する。
【解決手段】本発明の実施形態の経路算出装置1000は、地図を、それぞれが座標情報で特定される複数のエリアに分割し、複数のエリアのそれぞれに含まれるノードの座標情報と、ノード間を結ぶリンクの情報とを、それぞれのエリアに対応付けて格納する地図情報記憶部50と、異なるエリアのそれぞれの境界に位置する境界ノード間の経路情報をリンクの組み合わせとして格納するエリア間経路記憶部1060と、地図情報記憶部50を参照して、始点を含む第1エリアと、終点を含む第2エリアを特定するエリア特定部70と、第1エリアと第2エリアを結ぶ経路情報を、エリア間経路記憶部1060より取得して、始点と終点を結ぶ経路を導出する経路導出部1080とを備える。
(もっと読む)
旅行時間提供装置及び方法、コンピュータプロクラム
【課題】 交差点の信号サイクルを考慮した旅行時間を生成できるようにして、より正確な旅行時間情報を車両に提供する。
【解決手段】 第一時点t1が交差点J1の信号サイクルC1中のどの相対時刻iで検出されたかを識別し、多数の旅行時間データTdをその相対時刻iごとに区分してなる相対時間データTr(i)を生成し、区分された複数の相対時間データTr(i)に基づいて相対時刻iごとの旅行時間T(i)を算出し、特定の相対時刻iに第一地点P1を通過した車両5に対して、その特定の相対時刻iに対応する旅行時間T(i)を提供する。
(もっと読む)
交通信号制御装置、及び流出交通流予測方法
【課題】自律分散型交通信号制御システムにおいて、流出方向に交錯する他の交通の交通量を考慮することで、精度の高い流出交通流予測を実現すること。
【解決手段】
各流入路から進行方向別の流出台数を算出する際に、進行方向の交錯交通の交通量に応じて、当該進行方向への流出台数を補正する。例えば、流入路Cから右折方向(流入路Bの方向)に進行する場合、交錯交通である流入路Aからの対向直進車に応じて流出台数を補正する。すなわち、予測対象の時刻から過去所定時間における流入路Aの到着台数と滞留台数との合計台数が所定の閾値台数を超える場合、当該右折方向への流出台数を「0」と補正する。
(もっと読む)
車両用交差点警報出力装置及び交差点警報出力システム
【課題】交差点を通行する自車両の運転者に対して交差点の信号状態に加えて自車両の周囲を走行する後方車両或いは前方車両をも考慮した警報を出力する。
【解決手段】車両用交差点警報出力装置3は、交差点の信号状態を交差点情報として受信し、後方車両或いは前方車両の走行状態を後方車両走行情報或いは前方車両走行情報として受信し、自車両の走行状態を自車両走行情報として取得し、交差点情報と自車両走行情報とに基づいて交差点の信号状態に対する自車両の挙動を予測し、後方車両走行情報或いは前方車両走行情報に基づいて後方車両或いは前方車両の挙動を予測し、交差点の信号状態に対する自車両の挙動を予測した予測結果と後方車両或いは前方車両の挙動を予測した予測結果とが所定関係であるときに緊急停止警報或いは停止警報の出力動作を行う。
(もっと読む)
衝突の危険に対する迅速で控えめな評価のためのセグメント化錐体の使用
【課題】衝突の危険に対する迅速で控えめな評価を得る。
【解決手段】早期警報のために一次主体と非一次主体との間の衝突の評価を容易にするシステムであって、一次主体の状態及び非一次主体の状態を示す情報を受信するように構成された受信機構と、未来の時間を多数の時間間隔に分割するように構成された時間分割機構と、一次主体及び非一次主体の多数の可能性のある未来の状態を見積もるように構成された計算機構とを含み、各々の未来の状態は前記時間間隔に対応しており、一次主体又は非一次主体の可能性のある未来の状態を、少なくとも1つの次元が時間を示す空間における1つ又はそれ以上の幾何学的物体として表示するように構成された表示機構と、幾何学的物体に基づいて、一次主体と非一次主体との間の衝突の確率を求めるように構成された決定機構と
を含むことを特徴とするシステム。
(もっと読む)
車両走行支援装置
【課題】 運転者の技量に応じた自車両の危険度を求め、この危険度を用いることにより、運転者の技量に応じた走行支援を行うことができる車両走行支援装置を提供する。
【解決手段】 危険度地図作成部1における統計処理部12では、データベース読込部11から出力される自車両の位置およびその位置における記憶危険度Rdb、並びに衝突確率算出部1から出力される自車両危険度Rcurに基づいて、自車両の位置における積算危険度Rnewを算出する。この積算危険度Rnewを地図データベース7に書き込む。
(もっと読む)
車両運転支援システム、運転支援装置、車両及び車両運転支援方法
【課題】青信号時間が変動する場合であっても、危険走行領域を特定することができる車両運転支援システム、運転支援装置、車両及び車両運転支援方法を提供する。
【解決手段】車載装置は、停止線までの距離、自車両の速度、交差点に設置された信号機の黄信号開始時点及び黄信号時間などに基づいて、自車両が黄信号開始時点で交差点の手前に停止する停止条件及び黄信号の終了時点で交差点に進入する進入条件を算出する。車載装置は、青信号の延長又は短縮時間の上限値、進入条件及び停止条件に基づいて、危険走行状態を特定する。
(もっと読む)
動画情報提供システム
【課題】 短時間に認識可能な動画情報を利用者に提供できる動画情報提供システムを提供する。
【解決手段】 カメラ1の撮影動画像を路側動画処理装置2a、(2b…)の動画処理機能4で符合化処理し動画像中で動くものの概形情報と総ドット数等のオブジェクト情報および動きに関する情報を生成するとともに、これら情報より道路交通状況情報作成機能5より動画像部分における道路交通情報の説明データとして交通量や平均速度、渋滞度等の情報を作成し、これら情報をネットワーク100より車載器15に伝送し、提供道路動画情報作成機能16で道路交通状況の動画像に道路交通状況を示す情報を融合し、運転者が一目で分かるように、渋滞度に応じた色マスクを施し2秒以下で認識できる情報を作成して提供する。
(もっと読む)
車両管理装置および車両管理システム
【課題】複数のハイブリッド車両を効率よく運用することができる車両管理装置および車両管理システムを提供する。
【解決手段】家庭や事業所に設置される車両管理装置200は、各々が蓄電装置を搭載する複数の車両に電力を供給する電力供給部203と、複数の車両の各々に搭載された記憶装置のデータを受信するデータ受信部201と、データ受信部201で受信した複数の車両に対応するデータと複数の車両目的地情報とに基づいて複数の車両のスケジューリングを行なうスケジューリング部221と、スケジューリングの結果に基づいて電力供給部203を介して複数の車両に電力を供給する電力供給制御部222とを備える。
(もっと読む)
自車両危険度取得装置
【課題】 時間の経過に伴う周囲の状況の変化があった場合でも、安定して危険度を求めることができる自車両危険度取得装置を提供する。
【解決手段】 運転者危険度取得ECU1は、他車両の予測進路を複数本算出して取得するとともに、自車両の実現進路を取得する。この予測進路と実現進路とから実現進路衝突確率を求める。また、自車両の可能進路の中から、自車両と他車両との衝突確率が最小となる最善自己進路を算出し、最善自己進路における他車両との衝突確率である最善自己進路衝突確率を求める。この実現進路衝突確率と最善自己進路衝突確率との乖離度を求め、この乖離度に基づいて求められる危険度に対して統計処理を行う。
(もっと読む)
障害物検出装置
【課題】車両側方領域を通過する二輪車を安定して検出することができる障害物検出装置を提供する。
【解決手段】車々間通信などにより、自車両に対して二輪車の接近が予測される場合、超音波センサ1FL、1FR、1RL、1RRのエコー時間検出範囲ETの設定をET1からET2に変更して、通常の検出範囲よりも広範囲(長距離)となるように調整するとともに、エコー閾値THの設定をTH1からTH2に変更して、通常の検出感度よりも高感度となるように調整する。
(もっと読む)
車両走行支援装置
【課題】 運転者の技量に応じたルートを求め、このルートを用いることによって運転者の技量に応じた走行支援を行うことができる車両走行支援装置を提供する。
【解決手段】 データベース読込部9は、目的地設定部8で設定された起点PSから終点PGまでのすべてのルートにおける危険度Rallを取得する。通常危険度算出部10は、地図データベース7に記憶されているすべての危険度から通常危険度θを算出する。フィルタ部11は、起点PSから終点PGまでのすべてのルートのうち、危険度Rallの中から通常危険度θ以下の危険度のみのルートを抽出する。最適経路探索部12は、通常危険度θ以下の危険度のみのルートから最適経路を探索する。
(もっと読む)
経路表示装置、経路表示システム
【課題】今後走行する経路上の各移動点で効率的な運転を行うための操作具合をユーザが事前にイメージすることを可能とすること。
【解決手段】制御回路が、オンルートスクロール処理において、経路の一部を、その経路の一部に関連するエコ運転情報とともに経路図(案内地図)によって表示部に表示させ、経路上を移動する仮想的な移動点と表示部上の基準位置(例えば、中心位置)とを一致させて経路図をスクロールさせるので、ユーザは、経路を実際に走行する前にその経路を確認する際に、その経路に関連するエコ運転情報を視認することができる。したがって、ユーザは、今後走行する経路上の各移動点で効率的な運転を行うための操作具合を事前にイメージすることができる。
(もっと読む)
車両用走行支援装置
【課題】本発明は、車両の走行に支障のある障害路の走行に適した走行条件を求めることができる、車両用走行支援装置の提供を目的とする。
【解決手段】車両の進行方向の路面を監視する車両周辺監視部10や画像処理部20と、車両周辺監視部10によって監視された路面において車両の進行の妨げとなる障害物を検出する障害物判定部30と、走行状態検出部40によって検出された車両状態と障害物判定部30によって検出された障害物の態様とに基づいて当該障害物を乗り越え可能か否かを判断する障害物乗り越え判断部50と、障害物判定部30によって検出された障害物の態様に基づいて該障害物の乗り越えに必要な走行条件を導出するナビゲーション部60とを備える、車両用走行支援装置。
(もっと読む)
141 - 160 / 585
[ Back to top ]