
Fターム[5H180FF05]の内容
交通制御システム (133,182) | 個別車両の運行・走行の管理 (59,670) | 車両位置の検出・表示を行うもの (15,249) | 位置情報を車外から受信するもの (8,868)
Fターム[5H180FF05]に分類される特許
6,461 - 6,480 / 8,868
ナビゲーション装置
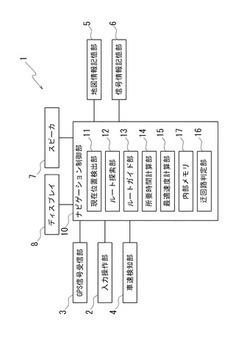
【課題】ナビゲーション装置において目的地までの走行ルート上で隣接する信号機がそれぞれ青の間に逐次通過してゆける最適速度を提示できるようにする。
【解決手段】信号機ごとの信号情報を信号情報記憶部6に格納し、その信号情報に基づいて最適速度計算部15で目的地までの走行ルート上の計算対象範囲の信号機が青で通過できる最適速度を計算しディスプレイ8に表示する。信号機通過ごとに計算対象範囲を進め、途中で最適速度が著しく低下するときは迂回路判定部が迂回路を探索してその最適速度を計算し、迂回路の所要時間の方が短いときは走行ルートを迂回路に変更するとともに、迂回路の最適速度を表示する。路側ビーコンなどの施設を要せず目的地までの信号機について、停止しないで通過できる最適速度Vを求めることができ、停止、発進の繰り返しによる燃料消費量の増大を抑止できる。
(もっと読む)
自動ランドマーク情報作成方法及びシステム

【課題】立体画像によるビジュアルなランドマークを自動生成し、地図上の所定位置に配置させることのできる自動ランドマーク情報作成方法及びシステムを提供する。
【解決手段】対象物を複数の方向から撮像した撮像画像を用いて立体画像からなるランドマークを生成し、この生成したランドマークを地図上の所定位置に配置させる際に、特定の場所から特定の方向に向けて撮像した対象物の撮像画像を複数枚用い、該複数の撮像画像から対象物の外観形状を特定する形状設定ステップと、この形状設定ステップで求めた外観形状からランドマークを生成するランドマーク生成ステップと、複数の撮像画像から対象物の位置を検出する位置設定ステップと、地図上における検出した対象物の位置に、生成したランドマークを配置するランドマーク配置ステップと、を有してランドマーク情報を自動形成する。
(もっと読む)
ナビゲーション装置および仮想道路リンク生成方法
【課題】中央分離帯がない道路を走行しているときに、市街地図表示モードなどで車両位置マークが上下線のほぼ中央に表示される違和感をなくすととともに、中央分離帯がある道路とない道路との変わり目の部分を走行しているときに、いわゆるカニ走りやマップマッチングミスを抑止できるようにした「ナビゲーション装置および仮想道路リンク生成方法」を提供する。
【解決手段】地図データ中に含まれる道路幅情報に基づいて、中央分離帯がない道路の上下線それぞれ毎に道路幅内に入る2本の第1の仮想リンクVL1を求めるとともに、中央分離帯がある上下線の道路に対応した2本の道路リンクRL2の端部と上記2本の第1の仮想リンクVL1の端部とを接続する2本の第2の仮想リンクVL2を求め、第1の仮想リンクVL1と第2の仮想リンクVL2を用いてマップマッチング処理を行うようにする。
(もっと読む)
経路探索装置、経路探索方法、経路探索プログラムおよびコンピュータに読み取り可能な記録媒体
【課題】目的地点までの経路でコンテンツの画質の乱れの抑制を図ること。
【解決手段】放送塔からコンテンツに関する情報(以下「コンテンツ情報」とする)を含む電波を受信する経路探索装置において、受信エリア取得部102は、放送塔からの電波の受信エリアを取得し、経路候補探索部101は、目的地点まで一つ以上の経路候補を探索する。そして、経路選定部103は、経路候補探索部101によって探索された経路候補の中から、受信エリア取得部102によって取得された受信エリアを含む部分が最大となる経路を選定する。
(もっと読む)
運転支援装置
【課題】 利用者に煩わしさを感じさせず、かつ安全運転に寄与することが可能な運転支援装置を提供すること。
【解決手段】 車両の利用者に警告情報を報知する運転支援装置Aに関する。前記利用者に応じて設定可能な個人運転情報を記憶する記憶手段4aと、前記個人運転情報に基づいて前記利用者の熟練度を設定し、前記車両が前記注意エリア中に有ると判定し、かつ、前記注意エリアデータの警告度が前記利用者の熟練度に対して報知すべきものであると判定される場合に報知手段5による報知動作を許可する個人別報知処理機能を有してなる制御手段4と、を備えたことを特徴とする。
(もっと読む)
移動体のナビゲーション装置及び移動体の現在位置算出方法
【課題】 マルチパスの影響を排除することで、より高い精度で現在位置を検出することが可能な移動体のナビゲーション装置及び移動体の現在位置算出方法を提供する。
【解決手段】 ナビゲーション装置10を備える車両の現在位置算出方法として、車両の現在位置を検出するための自律航法センサ5と制御部17とからなる自律測位手段が新たに算出した自律測位データの誤差範囲を、新たな現在位置の予測エリアデータとして算出するステップと、車両の現在位置を検出するためのGPS受信部4が新たに算出したGPS測位データが、予測エリアデータに含まれるかどうかを判定するステップと、GPS測位データが予測エリアデータに含まれないと判定した場合に、自律測位データを利用して現在位置を示す現在位置データを新たに算出するステップとを有する。
(もっと読む)
車両制御装置
【課題】取得した生体情報に基づいて、より正確な必要性判断のもと運転支援を行う。
【解決手段】心拍等の生体情報が所定の閾値(基準値)を越えたかい否かを、警告や車両制御等の運転操作支援を行うか否かを判断するための条件とし、この生体情報の閾値を、同乗者の有無に応じて変更する。これにより、従来よりも、より正確な運転者支援を行うことができるようになる。
すなわち、一人で運転している時と、隣に上司などの普段から緊張する相手が同乗している場合とでは、通常時の生体情報が異なるため、同じ閾値で判定できない。
そこで、同乗者によって緊張度が増している場合は、その緊張度を踏まえて閾値を設定し、運転操作に対する緊張度を検出しやすくする。
(もっと読む)
移動体用アプリケーション実行装置
【課題】場所毎に装置を製造することなく、また、場所が移動したときにアプリケーションソフトが対応できなくなる不具合を解消する。
【解決手段】ナビゲーション装置において、制御回路は、GPS受信装置の信号により現在地を認識し(S1〜S3)、記録媒体に記録している現在地に対応したアプリケーションソフトを読み出して実行する(S4〜S8)。これにより、起動時に適切なアプリケーションソフトを実行することができ、移動中でも、アプリケーションが異なる地域に入ると自動的に読み込んで切り替えることができる。
(もっと読む)
地図表示装置
【課題】画面に表示される3次元地図が、どの位置や方向から何を見たものなのかが容易に把握できるようにすること。
【解決手段】基準視点ipから見たSPV地図上に基準視点ipと異なるアイコン視点aiを設定し、このアイコン視点aiから見たアイコン視点地図をSPV地図とともに表示する。
(もっと読む)
ナビゲーション装置、及び道路情報表示方法
【課題】経路案内機能を使用していない通常走行時においても自車の進行方向上にある交差点の車線情報を通知することが可能なナビゲーション装置を提供する。
【解決手段】経路案内機能が無効である状態において、自車が走行する進路を予想し、かつ予想進路上の自車から所定距離内の場所に交差点が存在するかどうかを、自車位置検出機能と道路地図データとを用いて常時監視する。交差点が検出された場合、検出された交差点の車線情報を、液晶モニター等に表示されている自車周辺地図において画像データ等を用いて表示する。また、車線情報が表示されている交差点を自車が通過した場合に、通過済みの交差点に対して表示されていた車線情報の表示を停止する。また、車線情報が表示されている交差点が、自車の予想進路より除外された場合に、予想進路より除外された交差点に対して表示していた車線情報の表示の停止を行う。
(もっと読む)
車両用障害物通知装置
【課題】運転者が、車両周囲に存在する注意すべき障害物の存在をより精度よく知ることができる車両用障害物通知装置を提供する。
【解決手段】車両周辺の障害物を検出する障害物検出手段、その検出した障害物が注意を必要とするものであるかどうかを判断する注意要否判断手段、所定の注意表示を表示する表示装置34、36、38、40、および運転者に対して任意の方向に仮想音源Sを生成することができる仮想音源生成装置を備え、車両周辺に障害物(歩行者60)を検出した場合、仮想音源Sの位置をその歩行者60の位置に設定して所定の注意音を出力するとともに、障害物の方向に対応する位置に設けられた表示装置に所定の注意表示(「注意!」など)を表示する。このように、注意音と注意表示とにより障害物の存在を通知することにより、運転者は、車両周囲に存在する注意すべき障害物の存在をより精度よく知ることができる。
(もっと読む)
道路情報更新装置
【課題】精度よく地図データの更新を行うことができる道路情報更新装置を提供する。
【解決手段】自車両が地図データ格納部25に格納された地図データ上の道路を走行していない場合に、GPS受信機10や車両情報取得部12から取得した新規道路情報と、画像情報取得部13から取得した実際の道路の画像とを記憶部27に記録する。車両の停車後イグニッションがオフとなる前に、入力支援部26は、記憶部27に記録された新規道路情報と、実際の道路の画像とを表示部30を通じて使用者に提示し、地図データの更新処理を促す。使用者は表示部30に提示された情報と画像とを見ながら地図データの変更を行うことができ、地図データ更新の信頼性を向上させることができる。
(もっと読む)
地図データ接合装置およびナビゲーション装置
【課題】配信された地図データと予め記憶された地図データとを接合し、接合された地図データを利用して最適な案内経路の探索および誘導案内を行うことができるナビゲーション装置を提供すること。
【解決手段】案内情報を記憶する案内情報記憶手段103と、配信情報および探索用データを記憶する配信情報記憶手段108と、案内情報および配信情報の何れの情報に基づいて案内経路の探索および誘導案内を行うかを判定する情報判定手段109と、車両の誘導案内に係る情報を処理する演算処理手段110とを備える構成とすることにより、隣接した地図データを接合させるようにした。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、ナビゲーションシステム及びプログラム
【課題】異なる装置間で情報を共有させ、その情報を基にドライバーに新たな提案を行うことで、ドライバーの興趣性を高める。
【解決手段】目的地まで案内するナビゲーション装置である。このナビゲーション装置の制御手段は、入力手段から通信開始指示が入力されると、通信手段を制御して外部装置に対する通信開始信号を出力させることで、外部装置の走行履歴を収集して、当該走行履歴の終点地点が現在地付近に存在している場合には、情報出力手段を制御して終点地点を出力する。
(もっと読む)
運転支援システムおよびプログラム
【課題】他の車両やインフラに依存せずに自車両のみで、信号機の視認を確保するような運転支援を行う。
【解決手段】自車両1が信号機認知位置に至る前に先行車両2との実際の車間距離Lrが必要車間距離Lnよりも短ければ、必要車間距離Lnの確保を促す報知を行う。例えば「信号機を認識可能な車間距離が確保できていません。車間距離を空けてください」といった内容の報知を行う。必要車間距離Lnは、信号機認知位置距離Ls×{(先行車両車高h2−運転者目線高さh1)/(信号機高さh3−運転者目線高さh1)}にて算出する。一方、破線で示すように、自車両1が信号機認知位置に至った後に先行車両2との実際の車間距離Lrが必要車間距離Lnよりも短ければ、例えば「信号機を認識可能な車間距離が確保できていません。信号機に注意してください」といった報知を行う。
(もっと読む)
車載用電子機器制御システム
【課題】 車両の乗員に応じて柔軟に機器機能の使用制限を定めることを可能とする車載用電子機器制御システムを提供する。
【解決手段】 車両200に搭載された電子機器の機能使用操作に使用され、該機能に対する使用制限状態を各々変更可能に設定される操作部11,14,16が、車両の複数の座席のそれぞれから個別に操作可能な位置に分散配置される。
(もっと読む)
経路案内装置
【課題】ユーザがロータリを容易に走行できるようになる経路案内装置を提供する。
【解決手段】車両の現在位置を逐次検出し、案内経路上の自車位置前方にロータリが近づいてきたら、そのロータリの直径(50mなど)を、ロータリの入口および出口の方向を示したロータリ概略図24とともにディスプレイ10に表示する。また、音声でも、ロータリの直径およびロータリ入口に対する出口の方向を通知する。これにより、ユーザは、ロータリの大きさに合わせた運転操作を容易に行うことができるので、容易にロータリを走行できるようになり、また、容易にロータリの出口の位置を認識することができる。
(もっと読む)
経路探索装置、経路探索方法、経路探索プログラムおよびコンピュータに読み取り可能な記録媒体
【課題】放送コンテンツ間の空き時間を利用して経由地点における時間を過ごし、ユーザの行動を制限することなく空き時間の有効活用を図ること。
【解決手段】経路探索装置100は、受信部101と、設定部102と、探索部103と、抽出部104と、を含み構成されており、受信部101は、複数の放送コンテンツの放送時間を受信する。設定部102は、目的地点までの経由地点を設定する。そして、探索部103は、受信部101によって受信された各放送コンテンツの放送時間に基づいて、複数の放送コンテンツ間の空き時間内または全放送コンテンツの放送時間終了後に、設定部102において設定された経由地点を経由するように、目的地点に到達する経路を探索する。
(もっと読む)
車両用道路形状検出装置
【課題】車両周辺の状況を走行条件に影響されず安価に検出する。
【解決手段】車両周辺の音を集音する複数のマイクを車両に設置し、各マイクで集音した車両周辺の音の大きさの時間変化パターンに基づいて道路の形状を検出する。
(もっと読む)
車載用ナビゲーション装置及び車両の速度に基づくマップマッチング方法
【課題】 車両を取り巻く環境にかかわらず、また、他のマップマッチング技術と組み合わせることで、車両が存在する道路を精度良く特定することが可能な車載用ナビゲーション装置及び車両の速度に基づくマップマッチング方法を提供する。
【解決手段】 距離センサ5bと、制御部17とからなる車両の速度を検出する速度検出手段と、車両の期待速度の変化を示す期待速度パターンデータを、道路地図上の道路を示す道路データに関連付けて有する地図データベースとを備える車載用ナビゲーション装置10であって、速度検出手段が検出した速度に基づき、車両の速度変化を示す速度パターンデータを算出する処理と、速度パターンデータと期待速度パターンデータとを比較して、相関の度合いを算出する処理と、算出した相関の度合いに基づき、車両が存在する道路を特定する処理とを実行する制御部17を備える。
(もっと読む)
6,461 - 6,480 / 8,868
[ Back to top ]