
Fターム[5H180LL06]の内容
Fターム[5H180LL06]の下位に属するFターム
音による警報であるもの (2,307)
音以外の警報であるもの (2,573)
Fターム[5H180LL06]に分類される特許
401 - 420 / 581
自動制動制御装置
【課題】トラックやバスにおける自動制動制御を実現する。
【解決手段】対象物と自車との相対距離および相対速度とに基づき導出されるTTCが設定値を下回ったときに自動的に段階的な制動制御を行う。また、積載貨物や乗客の重量に応じて制動パターンを変更する。
(もっと読む)
衝突判定システム、衝突判定方法及びコンピュータプログラム

【課題】 サンプリングされた障害物の位置データを、現在位置を基準に補正し、補正した位置データに基づいて衝突の可能性を精度良く判定することができる衝突判定システム、衝突判定方法、及びコンピュータプログラムを提供する。
【解決手段】 車両の外部を撮像する撮像装置で撮像した画像データ中の障害物の存在を検出し、障害物を検出した場合、障害物の当該車両に対する相対位置を時系列的な位置データとして検出し、衝突の可能性を判定する衝突判定システムにおいて、車両の走行状態を検出し、検出した障害物の過去の複数時点の位置データを、走行状態検出手段で検出した車両の走行状態及び位置データに基づいて補正し、補正した位置データに基づいて障害物の当該車両に対する相対移動ベクトルを算出し、算出した相対移動ベクトルに基づいて、障害物が当該車両と衝突するか否かを判定する。
(もっと読む)
運転支援装置
【課題】 自車両周辺の複数の物体に対して適切な接触回避動作を実行する。
【解決手段】 走行制御部26は、物体と自車両との接触発生を回避あるいは接触発生時の被害を軽減する接触回避動作として、自車両の操舵機構の操向動作を制御する際には、この操向制御の非作動時に比して、自車両の減速制御の作動条件を緩和(例えば、より作動し易くなるように変更、あるいは、作動開始タイミングが早くなるように変更等)する。警報制御部27は、走行制御部26により物体と自車両との接触発生を回避あるいは接触発生時の被害を軽減する接触回避動作として、自車両の操舵機構の操向動作が制御される際には、この操向制御の非作動時に比して、自車両の警報制御の作動条件を緩和(例えば、より作動し易くなるように変更、あるいは、作動開始タイミングが早くなるように変更等)する。
(もっと読む)
車車間通信装置
【課題】 本発明は、通信トラフィックが不要に増加することを削減できる車車間通信装置を提供することを目的とする。
【解決手段】 受信した車車間通信データの受信レベルと伝搬特性モデルを用いて前記車車間通信データの受信限界を算出して前記車車間通信データが届く推定エリアを求める推定エリア算出手段17と、予め設定されており送信車両から送信される車車間通信データが届けられるべき所望エリアと前記推定エリアを比較する比較手段18と、前記推定エリアが前記送信車両の所望エリアより小さい場合、自車が前記推定エリア内で前記受信限界に最も近いとき前記車車間通信データの中継が必要と判定する中継必要性判定手段18を有する。
(もっと読む)
車載警報装置
【課題】 車両衝突前において運転者の脇見状態に合わせた適切な警報を行うことにある。
【解決手段】 運転者の視線方向が正面方向にあるときは前方障害物との衝突可能性が基準しきい値レベルに達してから、一方、車両運転者の視線方向が正面方向にないときは前方障害物との衝突可能性が上記の基準しきい値レベルよりも低いしきい値レベルに達してから、車両運転者に向けて警報表示ディスプレイによる警報表示及び警報ブザーによるブザー吹鳴の一次警報を行わせる。そして、衝突可能性が基準しきい値レベルよりも低いしきい値レベルに達することで一次警報が開始された後、衝突可能性が基準しきい値レベル以上にあり、かつ、車両運転者の視線方向が正面方向にない状態の継続時間が所定時間以上である場合に、ブレーキ装置による警報制動の二次警報を行わせる(ステップ100〜108)。
(もっと読む)
運転状態推定装置
【課題】ドライバの注意力の変化を的確に推定しドライバに対して適切に警報を行う。
【解決手段】制御ユニット8は、先行車を基準とする注意過多状態判定領域を設定し、予め設定した状況下での注意過多状態判定領域内での視線の基準停留時間に対する過去10秒間における注意過多状態判定領域内での視線の停留時間の比率(停留時間比)が予め設定した閾値以上で、且つ、過去10秒間の先行車を基準とする平均視線角度が予め設定した閾値以下の場合に注意過多状態と判定する。一方、複数の立体物を基準とする漫然状態判定領域を設定し、予め設定した状況下での漫然状態判定領域内での視線の基準停留時間に対する過去10秒間における漫然判定領域内での視線の停留時間の比率(停留時間比)が予め設定した閾値以上で、且つ、過去10秒間の先行車を基準とする平均視線角度が予め設定した閾値以上の場合に漫然状態と判定する。
(もっと読む)
障害物検出システム
【課題】 設置コストを抑制しつつ、夜間であっても死角領域に存在する歩行者等を検出することができる障害物検出システムを提供する。
【解決手段】 分岐点に赤外光を反射する反射部材4を設けてあり、赤外光撮像装置は、反射部材4で反射した赤外光により形成された反射画像を含む画像を取得し、取得した画像を画像処理装置へ送出する。画像処理装置は、取得した画像を認識し、反射画像内に認識対象物が存在するか否かを判断し、存在すると判断した場合、その旨を示す情報を出力装置へ送出する。出力装置は、認識対象物が存在する旨の情報を取得した場合、外部へ認識対象物が存在する旨を報知する。
(もっと読む)
車両周辺物体検知装置およびシステム
【課題】 静止物を正確に検知することができる「車両周辺物体検知装置およびシステム」を提供すること。
【解決手段】 車両周辺物体検知装置には、車両周辺の物体を検出するレーダ処理モジュール10、位置算出部12と、車両の走行状態を含む車両情報を取得する車両情報取得部14と、検出された物体の検出履歴情報を車両情報とともに格納する検出履歴DB20と、新たに物体が検出されたときに、そのときの車両情報を検索キーとして、この検出された物体と一致する物体が存在するか否かを検出履歴情報に基づいて検索し、一致する物体の存在が確認されたときにこの物体を静止物として判定する静止物判定部30とが備わっている。
(もっと読む)
環境認識装置
【課題】 車載カメラにより撮像された車両前方のカラー画像に基づく環境認識を平易かつ少ない処理量で実行可能な環境認識装置を提供する。
【解決手段】 色情報生成部10では、取り込んだ画像データの平均色をマクロブロック単位で算出し、各マクロブロックの平均色がどの色インデックスに対応するかを判定する。その判定結果である色情報とマクロブロックとを対応づけてなる色配列情報を色インデックスメモリ14に格納する。ヒストグラム生成部15は、色配列情報に従って、注目する色インデックスに対応する色情報が付与されたマクロブロックの分布を表す色ヒストグラムを生成する。これら色配列情報や色ヒストグラムに基づいて、色アプリ実行部16では、画像の領域分割(形状獲得)を行うことなく、オブジェクトや周囲又は自車両の状況を認識する。
(もっと読む)
車両用警報装置
【課題】 自車両に対する障害物があることを運転者が直感的に認識可能となるように警報を発する。
【解決手段】 車両用警報システムには、運転席に着座した運転者へ向けて空気を噴出するエアノズル36FR、36FL、36RR、36RLが設けられており、警報ECU12は、障害物検知装置14によって検出した障害物の方向に基づいて、エアノズルを選択し、エアコンECU22から読み込んだ室温と、外気温度センサ24によって検出する外気温度に基づいて、外気を噴出するかエアタンク34内の冷却空気を噴出するかを選択する。また、警報ECUは、障害物検知装置によって検出する障害物の距離に基づいて噴出し風量を設定し、これらの設定に基づいて、ポンプモータ30又はソレノイドバルブ40を駆動すると共に、選択したエアノズルに対応するリニアソレノイドバルブ42を駆動する。
(もっと読む)
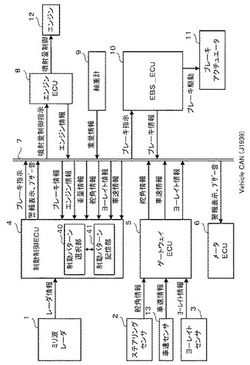
車両制御装置および車両ネットワークシステム
【課題】 安定した十分な車両のリスク管理を可能とする車両制御装置および車両ネットワークシステムを提供すること。
【解決手段】 各車両には車両制御装置1〜4が設けられ、周辺車両との間で無線によるネットワーク5を構築する。各種センサ12を使用して自車両の運行状況を収集し、周辺車両の運行状況をネットワーク5を介して取得し、それらに基づき各車両のリスクの度合いを演算し、演算された各車両のリスクの度合いに基づき自車両のリスクの度合いが最も小さい場合に自車両をネットワーク5内の親として決定し、親として決定された場合は、演算されたリスクの度合いと自車両の運行状況と周辺車両の運行状況とに基づき各車両のリスク回避方法を演算し、演算された周辺車両のリスク回避方法をネットワーク5を介して周辺車両に通知する。通知された周辺車両および自車両は、通知されたリスク回避方法に基づき、リスク回避のための処理を行う。
(もっと読む)
俯瞰画像表示システム及び俯瞰画像の表示方法
【課題】障害物が存在する位置で不連続性が生じない俯瞰画像を表示して、障害物の存在やその種別をユーザが容易に認識できるようにする。
【解決手段】車両周囲の画像を複数の車載カメラ11,12,13,14で各々撮影し、これら複数の車載カメラ11,12,13,14により撮影された複数の撮影画像をそれぞれ俯瞰画像に変換すると共に繋ぎ合わせることで、1つの連続した俯瞰表示画像として表示装置40に表示するにあたり、第1乃至第4のソナー21,22,23,24によって俯瞰表示画像の繋ぎ目部分に対応する領域に障害物が存在することが検知された場合には、俯瞰表示画像の繋ぎ目部分となる位置を変化させるようにした。
(もっと読む)
車両用停止線検出システム
【課題】 道路上の停止線を正確に検出する。
【解決手段】 車載機において、車両の停車状態が検出されたときに、車両の停止位置を検出するとともに、道路地図データから停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信し、情報センターにおいて、複数の車載機から停止線情報を収集してリンクおよびノードごとに分類するとともに、リンクおよびノードごとに複数の車載機の停止位置データを統計処理して停止線位置を推定し、推定した停止線位置を複数の車載機へ配信する。
(もっと読む)
障害物判断装置及び方法
【課題】 障害物の判断精度の向上を図ることが可能な障害物判断装置及び方法を提供する。
【解決手段】 障害物判断装置1は、自車両の前方物体が将来的に障害物となるかを複数の判断手法それぞれによって予備的に判断する。また、障害物判断装置1は、判断した各判断手法の判断結果について精度を求める。さらに、障害物判断装置1は、複数の判断手法の結果から、走行シーンに応じた判断手法の判断結果を求め、この判断結果と既に求めておいた精度とから、自車両の前方物体が障害物になるかを最終的に判断する。
(もっと読む)
撮像装置のずれ検出方法、撮像装置のずれ補正方法及び撮像装置
【課題】車載カメラのロール方向のずれを検出する。
【解決手段】撮像装置のずれ検出方法では、白線交点算出手段28及び白線交点座標記憶手段30により、撮像装置により得た撮像画像内で特定の一対の左右白線について自車両から遠方で形成される交点を取得するとともに、当該交点を自車両が車線内で左右方向に移動した際に得た前記撮像画像それぞれから取得し、ロール角算出手段31により、前記取得した複数の交点の位置から直線近似式を算出し、前記撮像画像に対する当該直線近似式の傾きに基づいて、前記撮像装置のロール方向の傾き(ロール角)を検出する。
(もっと読む)
音声感知システム
【課題】
本発明の目的は、接近する救急車のサイレン,踏切の警告音,後続車のクラクションなど、緊急性を持つこれらの音声を運転者が正確に感知できるような音声感知システムを提供することにある。
【解決手段】
上記目的は、音声収集装置と、収集した音声のうち緊急性を持つ音声を識別する音声識別手段と、識別した結果を運転者に伝える伝達手段を備える音声感知システムにより達成される。
より好ましくは、前記音声感知システムにおいて、運転者の運転特性を記憶する手段を備え、前記運転特性に基づいて前記伝達手段の伝達特性を変更することを特徴とする音声感知システムにより達成される。
(もっと読む)
衝突危険予測システム、および、プログラム
【課題】 航空機同士の衝突危険状態を適切に検出することのできる衝突危険予測システム等を提供する。
【解決手段】 レーダ装置1は、レーダスキャン等により、管制すべき各航空機の飛行位置、速度及び、方向を含む飛行情報を、それぞれ取得する。処理装置2は、レーダ装置1により取得された飛行情報に基づいて、各航空機の速度ベクトルを求め、速度ベクトル同士から定まる相対ベクトルを算定する。処理装置1は、予め定められた円柱形状からなる保護領域を、各航空機の飛行位置に対応する仮想空間にそれぞれ設定すると、この各保護領域に、算定した相対ベクトルに応じて半径等の長さが異なる扇形柱形状の領域を、各航空機の進行方向に対応させてそれぞれ付加し、各保護領域を拡張させる。そして、処理装置2は、拡張させた保護領域同士の重なりに基づいて、衝突危険状態を検出する。
(もっと読む)
車両用走行支援装置
【課題】
運転者の認知・判断・操作を補助する車両用走行支援装置において、カメラ等の画像センサで撮像した画像データの処理に要する時間を短くすると共に、障害物の認知の精度を向上させることが可能な車両用走行支援装置を提供することを課題とする。
【解決手段】
自車両の位置情報と車車間通信により得られた周囲車両A1の位置情報とから周囲車両A1の相対位置を算出し、該相対位置に基づいて画像センサ11による撮像画像Sの処理領域を限定し、予め記憶されたテンプレートT0を周囲車両A1の位置情報に基づきスケール変換して得られるテンプレートT1を撮像画像S中の周囲車両A1の画像とを比較して周囲車両A1の位置を正確に検出し、自車両と周囲車両A1との接触部位及び接触角度の推定を行い、これに基づいて乗員保護装置15〜18を作動させる。
(もっと読む)
自車位置算出装置およびその算出方法
【課題】 走行中にナビゲーション装置がリセットされた場合であっても、自車位置の算出を精度良く行うことができる「自車位置算出装置およびその算出方法」を提供する。
【解決手段】 車両の走行距離に応じて生成されるパスル信号に基づき自車位置を算出する自車位置算出方法は、パルス信号を積算し、積算されたパルス数に応じた走行距離情報を一定の周期で送信するステップ(S103)と、送信された走行距離情報の差分に基づき移動距離を算出するステップ(ステップS104)と、自車の運動特性から移動距離が異常であるか否かを判定するステップ(ステップS105)と、異常であると判定されたとき、算出された移動距離を補正するステップ(S106)と、補正された移動距離に基づき自車位置の算出・更新を行うステップ(S108)とを有する。
(もっと読む)
車両用走行支援装置
【課題】
車両用走行支援装置において、撮像手段による歩行者の抽出・特定を確実に精度よく短時間で行うことを課題とする。
【解決手段】
自車両の周囲の歩行者を検出する車両用走行支援装置1は、自車両Xの周囲の上部空間を撮像する上部カメラ20と、自車両Xの周囲の下部空間を撮像する下部カメラ30と、前記上部カメラ20で撮像された被撮像物と自車両Xとの間の距離を計測するレーダ40と、前記レーダ40で計測された距離が所定の距離よりも短いときに、前記上部カメラ20の撮像結果と前記下部カメラ30の撮像結果とに基いて自車両Xの周囲に歩行者が存在することを検出するコントロールユニット10とを備えている。
(もっと読む)
401 - 420 / 581
[ Back to top ]