
Fターム[5H180LL06]の内容
Fターム[5H180LL06]の下位に属するFターム
音による警報であるもの (2,307)
音以外の警報であるもの (2,573)
Fターム[5H180LL06]に分類される特許
341 - 360 / 581
複数カメラ撮影画像処理方法及び装置

【課題】複数設置した車外撮影カメラの画像を合成処理し、車両上方に設置した1つのカメラで撮影した画像のように表示する際、車両近辺の立体物を見やすく表示することができる複数カメラ撮影画像処理方法及び装置とする。
【解決手段】車両上方視点画像処理部9では、車外を撮影する複数のカメラ2、3、4、5の撮影画像を取り込んで車両上方を視点とした画像を合成処理し、画像内輝度・色差判別部11では前記画像合成処理した画像内において、輝度・色差等により他とは異なる画像表示変化部分の検出を行い、更に立体物検出部12では画像内輝度・色差相違物が連続的に変化するときそれを立体物とする。検出した立体物は標準表示、或いは2視点による立体物表示処理を行う。この立体物表示画像は、画像接続合成部15で車両上方視点画像に対して、立体物の基部前端部分で接続して表示する。
(もっと読む)
道路通行者検出システム及び携帯端末

【課題】本発明は、発振器内蔵の携帯端末の送信波を検知する技術において、消費電力を抑えた携帯端末の提供、及び、道路通行者が所持する発振器内蔵の携帯端末の消費電力を抑えることができる道路通行者検出システムの提供、を目的とする。
【解決手段】道路通行者が所持する携帯端末12の送信波を車載機10が受信することによって、車載機10が道路歩行者を検出する道路通行者検出システムにおいて、携帯端末12は、車載機10の送信波の受信レベルとその受信レベルの変化量を検出することによって車載機10を搭載する車両が接近しているか否かを判断し、接近していると判断した場合に、携帯端末12を所持する歩行者の存在を車載機10に検知してもらうための電波の送信を開始することを特徴とする、道路通行者検出システム。
(もっと読む)
障害物検知システム
【課題】複数のレーダ装置を備えた車両において電波干渉が生じた場合、送信周波数等を変更して電波干渉を回避しなくてはならない。本発明は、各レーダ装置の送信周波数等の情報を共有化することにより、送信周波数等の変更後に、再び他レーダ装置との電波干渉を引き起こさないようなレーダ装置を提供する。
【解決手段】近接した複数のレーダ装置が、通信を介してお互いの変調態様情報を共有することにより、外界からの電波干渉時でも共有相手に対する電波干渉が発生しないようにする。
(もっと読む)
自動車安全走行支援システム
【課題】 自動車の異常をセンターに通報し、センターより処置方法等の情報提供を受ける自動車安全走行支援システムを提供する。
【解決手段】 自動車の異常検出センサーからの異常による自動警報と、人の操作による手動警報をセンターに通報し、センターより最寄のサービスセンター等の情報及び処置方法の提供を受ける自動車安全走行支援システムを特徴とする。
(もっと読む)
運転支援装置
【課題】運転者に適応したタイミングで通知処理を実行する運転支援装置を提供すること。
【解決手段】カメラ31が撮影し、前処理部11による処理が施された入力画像から車両や白線、歩行者を認識し、衝突判定部20が認識結果を用いて衝突の発生を予測する。警告タイミング制御部21は、衝突に関する警告を行なう場合に運転者情報保持部13が記憶する年齢情報や運転暦情報を参照し、運転者の判断速度や反応速度、操作の正確さに応じたタイミングで警告出力を実行する。
(もっと読む)
接近報知システム、並びにそれに用いる車載機及び携帯端末
【課題】本発明は、チャネルを有効に活用することができる接近報知システム、並びにそれに用いる車載機及び携帯端末の提供を目的とする。
【解決手段】歩行者が所持する携帯端末の送信波を車載機が受信することによって、車両と歩行者が互いに接近している旨を報知し得る接近報知システムにおいて、携帯端末12の所持者である歩行者の位置情報(方向と距離)と、車両の走行状態として、車速、ウィンカ情報及びナビゲーション情報とを取得することによって、車両と歩行者が互いに接近している旨を報知する必要性が低い段階であるとみなしたエリアに歩行者が存在すると認識した場合には、前記送信波の送信間隔を通常より長く設定することを特徴とする、接近報知システム。
(もっと読む)
無能力モニタ
対象の無能力を監視する方法であり、この方法は、該対象の少なくとも1眼の目及び瞼の動きを継続的に監視するステップと、眼球静止の測定及び目又は瞼の動きのない間隔の継続時間の測定を実現するために、目及び瞼の動きを分析するステップと、眼球静止の継続時間が既定値を越えた場合、潜在的無能力警告を与え、既定期間内の応答を要求するステップと、もし既定間隔内に応答がなされない場合、緊急手順を適用するステップとを含んでいる。 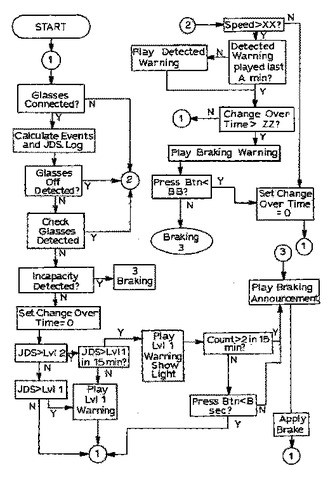 (もっと読む)
(もっと読む)
携帯端末、車載装置、及び車両接近報知システム
【課題】異種局間で同一のチャンネルを利用しつつ相手局の種類(例:車載装置と携帯端末など)を簡単に識別することができる通信方式を実現すること。
【解決手段】携帯端末100の送信処理部120には、発信するon信号が周波数変調されるon・off変調処理手段が備えられている。車載装置500の周波数弁別器513は、携帯端末100の送信処理部120から送出されるキャリヤの周波数変調を復調する手段として備えられたものであり、判定部514は、その周波数変動の変動幅Δfが所定の閾値以上の値を示した場合には信号解析部531に受信信号rを出力し、この周波数変動の変動幅Δfが所定の閾値未満の値を示した場合には、受信信号rを無視する。その後段の信号解析部531は、入力された受信信号rを携帯端末100から送られてきた正規の信号として解析する。
(もっと読む)
運転支援方法及び運転支援装置
【課題】安全運転支援と実用性との両立を図る運転支援方法及び運転支援装置を提供する。
【解決手段】ナビゲーション装置1のナビユニット2は、自車位置周辺の地理的状況、周辺車両状況及び自車両の運転状況のうち少なくとも一つに基づいて、警告レベルLを設定するCPU10を備える。また、運転者の脇見を判断する画像プロセッサ20に基づき、運転者の脇見を検出した際に、設定された警告レベルLに基づいて、脇見を警告する。
(もっと読む)
運転支援装置
【課題】右折に関する支援を適切に行なうことが可能な運転支援装置を提供すること。
【解決手段】自車両が交差点を右折する際に運転支援を行なう運転支援装置1であって、自車両が右折しようとしている交差点の大きさを検出する、交差点サイズ検出手段20と、自車両が右折を開始してから完了するまでの右折完了時間を、交差点の大きさに対応付けて記憶する、右折完了時間記憶手段42と、対向車両が交差点に到達するまでの到達時間を含む対向車両に関する情報を取得する、対向車両情報取得手段10と、交差点サイズ検出手段により検出された交差点の大きさに対応付けられた右折完了時間を、右折完了時間記憶手段から読み出し、読み出した右折完了時間と対向車両情報取得手段により取得された到達時間とに基づいて、自車両の右折に関する右折支援制御を実行する右折支援制御手段40とを備える。
(もっと読む)
脇見運転防止装置
【課題】後退時に適切に脇見運転を判定して運転者への警報を行うことができる脇見運転防止装置を提供すること。
【解決手段】本発明に係る脇見運転防止装置1は、運転者の顔又は視線の方向が所定の範囲内に第一の期間あれば脇見運転であると判定する脇見運転防止装置であって、
前記所定の範囲を車両の前進時と後退時とで異ならせる範囲変更手段3を有することを特徴とする。
(もっと読む)
交通路の或る区間への移動物体の侵入を阻止する方法とシステム
【課題】
交通路の一時的に保護された区間への移動物体の侵入を移動物体の操縦者への直接的警告によってより良く回避できる方法とシステムを提供すること。
【解決手段】
この発明は、交通路(LB)の一つの少なくとも一時的に保護される区間(K)に移動物体(F,F1,F2)の侵入の前に移動物体(F,F1,F2)の操縦者に警告するシステムと方法に関し、このシステムは次の構成要件から成り、a)一時的に保護される区間(K)の作動できる前もって形成された境界(RHB1,RHB2)と;b)この境界(RHB1,RHB2)に対する移動物体(F,F1,F2)の滞在地を確認する手段(D1乃至D4)と;c)作動された境界(RHB1,RHB2)が移動物体(F,F1,F2)により侵犯されるか否かを確認するために前もって形成された一つの境界値と移動物体(F,F1,F2)の境界(RHB1,RHB2)からの距離とを比較する手段と;d)同時作動の際の作動された境界(RHB1,RHB2)の侵犯により送信装置(HF,HF1,HF2)が移動物体(F,F1,F2)の受信装置に調整された警告信号(WS)を送信させるように作動できて、移動物体(F,F1,F2)の受信装置が多数の予め形成された無線周波数帯を支持し、送信装置がその警告信号(WS)をすべてのこれらの予め形成された無線周波数帯に送信する、作動できる送信装置(HF,HF1,HF2)と移動物体(F,F1,F2)に配置された受信装置と;e)操縦者用の警告信号(WS)の音響的且つ光学的又はそのいずれか一方に送信する物体側手段とを備えている。 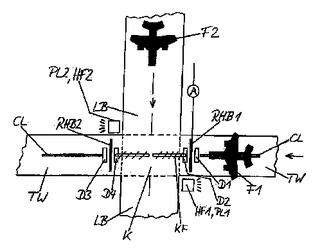 (もっと読む)
(もっと読む)
無線補助回復システム及び方法
【課題】警報システムとオートパイロット・システムの間で通信することを可能にする、補助回復のためのシステム及び方法を提供する。
【解決手段】例示的方法は方向角またはピッチ命令信号の少なくとも1つを受け取る。ローカライザ又はグライドスロープ信号が、この受信信号に基づいて発生される。ローカライザ又はグライドスロープ信号は、予め定められた周波数の無線で、送信機を通して送信され、航法システムの受信機で受信される。乗り物はこの受信信号に基づいて制御される。航空機が地上、障害物又は特殊用途空域の少なくとも1つからの警戒距離内にある時に接近警報装置が警告を発生し、補助回復要素が発生された警告と遅延に基づいて方向角及びピッチ命令信号を発生する。
(もっと読む)
運転支援装置及び運転支援システム
【課題】 運転者の運転に対する生体状態を精度良く検出して、警告などの報知や車両の動作の制御を好適に行うことができる運転支援装置及び運転支援システムを提供すること。
【解決手段】 S100では、生体センサ1のマイコン54によって、運転者の状態を測定する生体状態測定処理を行う。この生体状態測定処理によって得られた運転者の生体データは、サーバ3に送られて、サーバ3のデータベースに蓄積される。S110では、演算処理装置によって運転者の生体状態が判断され(生体状態判定処理)、その判断結果を示すデータが、サーバ3を介して車両側に送信される。S120では、生体状態判定処理によって得られたデータに基づいて、運転者に警告やアドバイス等を行う報知制御処理を行う。S130では、生体状態判定処理によって得られたデータに基づいて、車両の走行に関する車両動作制御処理を行う。
(もっと読む)
運転者適応型運転行動推定装置
【課題】運動行動の推定精度の高い運転者適応型運転行動推定装置を提供する。
【解決手段】自車両の現在位置を表す位置情報を求める位置算出部30と、目的地の設定や最適な経路の設定などを行う経路設定部31と、経路設定部31にて設定された経路に従って、経路中に設定される直近の対象ポイントまでの距離を算出する距離算出部32と、運転者の運転操作の傾向を表す運転傾向パラメータを記憶するパラメータ記憶部33と、運転者の運転操作が反映される車両情報及び運転傾向パラメータに基づき運転者の行動を推定する運転行動推定部35と、対象ポイントでの運転者の運転行動を認識する運転行動認識部36と、運転傾向パラメータの更新を行う運転行動適応部38を備えている。
(もっと読む)
運転支援装置
【課題】自車両位置に応じた運転者への注意喚起の頻度を適切なものとした運転支援装置を提供すること。
【解決手段】車両において、自車両位置に応じて運転者に注意喚起する運転支援装置が、自車両の位置を検出する検出手段と、自車両位置から第一の所定範囲内に要注意地物が存在するか否かを判定する第一の判定手段と、自車両位置から第一の所定範囲よりも広い第二の所定範囲内に別の要注意地物が存在するか否かを判定する第二の判定手段と、第一の判定手段により第一の所定範囲内に要注意地物が存在すると判定されたときに、自車両運転者に注意喚起する注意喚起手段とを備え、この注意喚起手段は、自車両運転者に注意喚起する際、第二の判定手段により第二の所定範囲内に別の要注意地物が存在すると判定されたときには、自車両周辺に複数の要注意地物が存在することを自車両運転者に注意喚起する。
(もっと読む)
挙動情報取得装置、表示端末及び挙動情報通知システム
【課題】
乗り物に乗車中にも転倒となどの危険を防止しつつ利用者自身の携帯端末でコンテンツを楽しむことのできる挙動情報表示システムを提供すること。
【解決手段】
乗り物に設置された挙動情報取得装置11は、送信部12を経由して、前記乗り物に乗車している利用者が携帯する携帯端末に挙動情報14を配信し、端末14は、利用者が視聴するコンテンツと共に挙動情報を表示ないしは音声出力する。これにより、利用者が乗り物に乗車中に各種コンテンツに集中していても、予め急停止などの危険を認識することができる。
(もっと読む)
走行速度監視プログラム、走行速度監視方法および走行速度監視装置
【課題】所定の範囲で示される地域毎に制限速度を設定することによって地図データを不要とし、走行速度監視装置の維持管理に掛かるコストを低減すること。
【解決手段】制限速度切替情報記憶部111が、地域と制限速度とを対応付けて地域毎に記憶し、制限速度切替処理部113が、車両10の位置と、制限速度切替情報記憶部111によって記憶されている地域毎の制限速度とに基づいて制限速度を自動的に切り替え、制限速度超過検知部114が、車両10の速度と、制限速度切替処理部113によって自動的に切り替えられる制限速度とを比較して、車両10の速度が制限速度を越えた場合に運転者に対して警報を通報するよう構成する。
(もっと読む)
後方車両解析装置及び衝突予測装置
【課題】車両と走行車線の位置関係を考慮して自車両の後方に位置する後方車両の走行経路を適切に解析することが可能な後方車両解析装置を提供すること、及びこれを利用して後方からの衝突を適切に予測することが可能な衝突予測装置を提供すること。
【解決手段】自車両の後方に位置する後方車両の走行経路を解析する後方車両解析装置であって、走行車線と自車両の位置関係を検出する位置関係検出手段10と、後方車両に関する情報を取得する後方車両情報取得手段20と、位置関係検出手段10により検出された走行車線と自車両の位置関係、及び、後方車両情報取得手段20により取得された後方車両に関する情報、に基づいて、後方車両が自車両の後方に延在する所定後方領域を走行している確率である所定後方領域確率を推定する、所定後方領域確率推定手段30と、を備えることを特徴とする。
(もっと読む)
車線変更支援装置
【課題】ルームミラーやサイドミラーから死角となる位置を走行している並走車両が存在する場合に、運転者が当該並走車両の走行している車線への車線変更を試みても、車線変更を行わせないように警告する車線変更支援装置を提供する。
【解決手段】自車両10の後部側方を撮像する撮像部12からの撮像映像に基づいて、走行車線31の隣接車線32を自車両10の走行速度以上の速度で走行している並走車両30を検出する。この状態で、隣接車線32側のウィンカ信号が検出されると、表示部14Aに警告図形71を表示すると共に発音部14Bから警告音を吹鳴することにより、隣接車線32への車線変更を行わせないように注意を促す。
(もっと読む)
341 - 360 / 581
[ Back to top ]