
Fターム[5H180LL06]の内容
Fターム[5H180LL06]の下位に属するFターム
音による警報であるもの (2,307)
音以外の警報であるもの (2,573)
Fターム[5H180LL06]に分類される特許
361 - 380 / 581
車両用運転操作補助装置、その装置を備える車両およびリスクポテンシャル演算方法

【課題】運転者が実際に感じているリスクをアクセルペダル反力制御に反映させる車両用運転操作補助装置を提供する。
【解決手段】車両状態および車両周囲の走行環境を検出する状況認識手段10,20と、状況認識手段10,20の検出結果に基づいて、自車両の先行車両までの現在の接近度合および/または将来予測される周囲環境変化による自車両への影響度合を算出し、将来の走行状況を予測する将来状況予測手段50とを有する。状況予測手段50によって予測される将来の走行状況に運転者の意図を加味してリスクポテンシャルを演算する。
(もっと読む)
運転支援装置

【課題】表示された目標物の画像を用いたユーザの操作に基づいて目標物の位置を検出することによって、画像処理等の複雑な制御処理を必要とせず、且つ様々な状況下においても高精度の検出が可能となった運転支援装置を提供する。
【解決手段】車両2が駐車を行う際に液晶ディスプレイ5に対してBGM画像53を表示させ(S4)、ユーザがタッチした輪止めの下縁の位置に基づいて輪止めの位置を検出する(S9)とともに、タッチした指の移動距離に基づいて輪止めの高さを検出し(S11)、輪止めの位置と輪止めの高さとに基づいて算出された車両2が輪止めと接触するまでの接触距離Lが所定距離(例えば20cm)まで接近した場合に、ユーザに対して警告を行う(S14)ように構成する。
(もっと読む)
付着物検出装置及び付着物検出方法
【課題】極めて少ない画像処理負担で自車前方を撮影するカメラの撮影画像に自車もしくはカメラの付着物有りを検出する。【解決手段】画像特徴検出手段により単眼カメラ2の撮影画像の画像データから画像特徴量の各画素点を検出して検出結果を記憶手段に保持し、一致点検出手段により少なくとも所定時間連続して画像特徴検出手段の検出結果が一致する各画素点を検出し、検索領域設定手段により撮影画像に基本検索領域とそれよりずれた副検索領域とを設定し、両検索領域それぞれの各エリアについて一致点検出手段の検出一致点数を計数する判定手段の極めて負担の少ない処理により、計数値がしきい値以上になる付着物のエリアを検出して付着物有りと判定する。 (もっと読む)
車両周辺監視装置
【課題】現実の撮像視野が進入先道路の延設方向を向いている場合は、進入先道路の方向を表示できるようにする。
【解決手段】車両前部の左右を撮影可能なように車両に設置されるカメラの各撮影画像を表示装置に表示する機能を備えた車両周辺監視装置。カメラが設置される車両の車体方位を検出する手段(S01)と、カメラが設置される車両の現在位置を検出する手段(S01)と、前記検出した現在位置から決まる進入先道路の道路情報を取得する手段(S01)と、前記検出した車体方位から決まる左右のカメラ撮像方向と前記取得した進入先道路の左右の道路延設方向との合致状態を調べる手段(S17)と、前記調べた結果に基づく判定により合致状態から外れていないと判定された方向の撮影画像を前記表示装置に表示する手段(S23,S33)と、を有する。
(もっと読む)
車両制御装置及び方法
【課題】カーブを走行する際に運転者の実際の感覚に合致するように車両制御を行うことができる車両制御装置及び方法、並びにそのような車両制御等に用いるための車速−ハンドル回転速度関係を導出する装置を提供する。
【解決手段】自車両2の進行方向のカーブ情報Cを取得するカーブ情報取得手段8と、自車両2の現在の走行状態の情報を取得する走行状態情報取得手段3と、カーブ情報Cに基づいて、当該カーブを走行する際の車速とハンドルの回転速度との関係を求める関係導出手段9と、ここで求めた関係に基づいてカーブを走行する際のハンドルHの回転速度を所定の閾値以下とするための目標走行状態を求め、現在の走行状態を目標走行状態に近づけるための制御を行う制御手段14と、を備える。
(もっと読む)
障害物検出システム及び障害物検出方法
【課題】撮像素子の出力値を左右の撮像装置で共通の絶対温度に対応した値へ補正するようオフセット補正値を算出することにより、より障害物を検出することができる障害物検出システム及び障害物検出方法を提供する。
【解決手段】車両の前方を撮像する複数の遠赤外撮像装置で撮像した複数の視差画像を取得して、画像中の障害物の存在を検出する検出装置とを備えた障害物検出システムにおいて、一の遠赤外撮像装置は、他の遠赤外撮像装置と同一の基準温度を記憶手段に記憶しておき、マトリックス状に配列された複数の撮像素子ごとに所定の温度に対する出力値を補正するオフセット補正値を算出し、表面の温度分布が略均一であり、撮像素子へ入光させる開口を開閉するシャッターの表面温度を計測し、計測した表面温度と基準温度との差に基づいて撮像素子ごとのオフセット補正値を補正する。
(もっと読む)
車両運転支援装置
【課題】物体の位置を正確に確認することができる「車両運転支援装置」を提供すること。
【解決手段】車両運転支援装置100は、車両周辺を撮影するカメラ10a〜10dと、撮影されたサイドビュー画像に基づいて路面投影を行ったトップビュー画像を生成するトップビュー画像変換部20と、各カメラに対応するトップビュー画像の重複領域に含まれる立体物を検出する立体物検出部30と、検出された立体物の路面上の水平位置を検出する立体物位置検出部32と、検出された立体物の水平位置を用いて立体物の位置を修正する立体物修正部34と、位置修正がなされた後の立体物が含まれるトップビュー画像を表示する表示処理部42、表示装置44とを備えている。
(もっと読む)
車両の操舵制御装置及び車両
【課題】運転者の運転意思の低下が認識されたときに、走行状況に応じた適切なタイミングで、報知や操舵アシスト処理の禁止を行うことができる車両の操舵制御装置及び車両を提供する。
【解決手段】STEP4〜STEP7及びSTEP30で、車両の速度Vsに基づいて算出した第1の判定時間Tvと走行車線の曲率Crに基づいて決定した第2の判定時間Tvとのうち、短い方を運転意思の低下を判断するための判定時間Tjとする判定時間決定手段と、STEP1〜STEP3及びSTEP20で、運転意思低下度合Dwが閾値Dw_th以上である状態の継続時間Tcntを計時する運転意思検出手段と、STEP8とSTEP40及びSTEP41で、該継続時間Tcntが判定時間Tj以上となったときに、警報と「操作アシスト処理」の禁止を行う運転意思低下対処手段53とを備える。
(もっと読む)
レーダ情報処理装置、レーダ画面表示プログラム
【課題】処理負荷を軽減した航空機等の位置表示を可能にする。
【解決手段】レーダ装置10により測定された航空機の位置を示すレーダ情報をもとに、航空機を表すシンボルをレーダ画面に表示するレーダ情報処理装置12であって、時間経過に伴うシンボルの変化を定義するパラメータを記憶するシンボルパラメータ記憶部27が設けられる。表示機能部24には、シンボルパラメータ記憶部27に記憶されたパラメータに応じてシンボルをレーダ画面に表示させるシンボル表示部421,422,423〜42nと、レーダ装置10により所定時間毎に測定された各レーダ情報に対応するレーダ画面の各位置において、個々にシンボル表示部421,422,423〜42nによってシンボルを表示させるシンボル表示制御部40とを設ける。
(もっと読む)
危険情報検出装置及び危険情報検出方法
【課題】車両がカーブに進入する前にカーブ走行時に危険となり得る領域を検出することが可能な危険情報検出装置及び危険情報検出方法を提供すること。
【解決手段】運転行動収集部21は、車両情報検出部11から取得した情報を運転行動データベース31に運転行動情報として蓄積する。取得した現在位置に基づいて、道路情報データベース32から自車両の走行方向前方に存在するカーブ区間を抽出する。そして、運転行動予測部22は、運転行動データベース31に蓄積された過去の運転行動情報に基づいて、抽出された走行方向前方に存在するカーブ区間における走行状態を予測する。推奨行動算出部24は、抽出されたカーブ区間にて推奨される走行状態を示す推奨条件を取得する。危険判定部23は、予測走行情報が推奨条件に適合しない道路区間を危険区間として判定し、提示部25は判定された危険区間を出力部81へ出力して提示する。
(もっと読む)
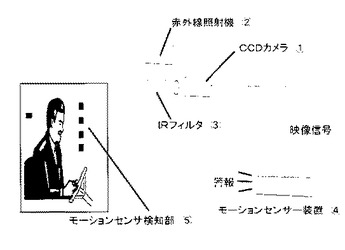
動作検知式居眠り防止警報装置
【課題】赤外線撮影対応CCD及び赤外線照射機、監視カメラ用モーションセンサ警報
装置を併用し、より簡単で導入しやすい自動車、電車など運転時の居眠りを
防止する警報装置を提供する。
【解決手段】赤外線対応CCDカメラと赤外線照射機を併用し運転者の顔面を赤外線
撮影して画像信号をモーションセンサー装置に出力する。
撮影画像上にモーションセンサー検知部を任意の位置に配置し運転者の
一時的な意識喪失による居眠り動作を検知、警報を発生する。
 (もっと読む)
(もっと読む)
車両の障害物検知装置
【課題】乗員の運転操作で回避しうる領域の障害物を車両の作動機器の制御の対象から除外して運転時の煩わしさをなくして安全且つスムーズに運転を行えるようにする。
【解決手段】ミリ波レーダ3(障害物検知手段)によって、自車両1の前方の障害物50を検知する。ミリ波レーダ3による障害物検知領域A1〜A4を、自車両1の前端部から所定距離前方に向けて設定し、その先端部を中央部分から後側方に向けて斜めにカットする。この障害物検知領域A1〜A4に障害物50が侵入したときに、制御ユニット(作動制御手段)によって車両の作動機器(警報装置、ブレーキ手段、シートベルトプリテンショナ等)を作動させる。
(もっと読む)
車載レーダ装置
【課題】他車両の発する送信信号である電波との相互干渉が生ずるときにも、確実にその他車両と自車両との相対関係を検知することにある。
【解決手段】周波数変調する電波を、第1変調幅で発するレーダ領域と、その第1変調幅よりも小さい第2変調幅で発する車車間連携領域とを交互に所定時間周期で出現させて送信信号として出力させる。また、その送信信号と受信信号との周波数差を変動周波数とするビート信号を生成させる。更に、送信信号の出力状態が車車間連携領域にあるときにビート信号の変動振幅が所定の下限しきい値よりも大きい場合、自車両の送信信号と他車両の送信信号との電波干渉が生じていると判定させ、その両信号の位相差が解消されるように自車両の送信信号の送信タイミングを変更させる。そして、その送信タイミング変更がなされた後、送信信号と受信信号との位相差に基づいて自車両と他車両との相対距離を検出させる。
(もっと読む)
潜在的リスク度警報装置および潜在的リスク度警報方法
【課題】 隣接車線を走行する他車との接触のリスク度の精度をより正確に推定し、ドライバに対し接触予防運転を促すことができる潜在的リスク度警報装置および潜在的リスク度警報方法を提供する。
【解決手段】 自車が走行する自車線の隣接車線を並走する他車の前方道路形状を検出する道路形状検出手段(ロケータ1および地図データベース2)と、他車の前方道路形状に基づいて、自車と他車とが接近する可能性の高さを潜在的リスク度として推定する潜在的リスク度推定手段5eと、潜在的リスク度に応じた警報を発する警報手段6と、を備える。
(もっと読む)
映像処理方法及び装置
【課題】自動車の運転者が表示画面において自車と映像で示される道路等との位置関係を把握しやすくする。
【解決手段】本映像処理方法は、自車両の走行道路と交差する交差道路の映像データを受信する受信ステップと、受信した映像データに係る交差道路と走行道路との交差角に基づき決定される剪断角で映像データに対して剪断変換を実施し、記憶装置に格納する変換ステップと、記憶装置に格納された剪断変換後の映像データから表示映像データを生成し、表示装置に表示する表示ステップとを含む。このように交差道路と走行道路との交差角に基づき決定される剪断角で映像を傾けることによって、運転者はどの方向の交差道路についての映像かを容易に把握することができるようになり、安全運転につながる。
(もっと読む)
運転支援装置
【課題】運転者の視線の死角領域内に存在する障害物を自動で監視できる運転支援装置を得る。
【解決手段】警告判定手段33は、視線検出手段31による視線方向の検出の結果に基づいて、運転者8の視線の死角領域を割り出す。また、複数のカメラ2〜5のうち死角領域を撮像するカメラによって撮像された画像内に、障害物が存在するか否かを判定する。そして、死角領域内に障害物が存在すると判定した場合には、スピーカ35から警告音等を出力することによって、運転者に対して注意を促す。
(もっと読む)
車両位置検出装置および車両位置検出方法
【課題】検出した車両位置を補正する。
【解決手段】道路状況検出部11は、車速センサ1によって検出される車速、および、ヨーレートセンサ2によって検出されるヨーレートに基づいて、走行している道路の曲率を算出する。道路状況推定部12は、GPSユニット4によって検出される車両位置、および、地図データベース3に格納されている地図データに基づいて、走行している道路の曲率を推定する。補正量算出部13は、道路状況検出部11によって検出される曲率、および、道路状況推定部12によって推定される曲率に基づいて、GPSユニット4によって検出される車両位置の誤差を検出するとともに、誤差を補正するための補正値を算出する。位置補正部14は、算出された補正値に基づいて、車両位置を補正する。
(もっと読む)
車両の障害物検知装置
【課題】乗員による車両の所定の運転操作状態が検知された場合に、障害物の誤検出を防いで安全且つスムーズに運転を行えるようにする。
【解決手段】ミリ波レーダ3(障害物検知手段)によって、自車両の前方の障害物を検知する。運転操作状態検知手段5によって、乗員による車両の所定の運転操作状態を検知し、得られた検知結果から作動タイミング切換手段12によって作動機器の作動タイミングを切り換える。この作動タイミングで制御ユニット10(作動制御手段)によって車両の作動機器(警報装置13、ブレーキ手段14、シートベルトプリテンショナ15)を作動させる。
(もっと読む)
走行支援装置
【課題】 ドライバが脇見をしている際に、脇見の種類によらず、障害物との衝突を避けるための走行支援を適切に行うことができる走行支援装置を提供する。
【解決手段】 走行支援装置1には、支援量増大部15と走行支援部16とが設けられている。支援量増大部15では、機器操作判定部12から出力される操作された機器の種類に基づいて、危険回避対応時間係数増大量を求めて、危険回避対応時間係数増大量に応じた増大量信号を走行支援部16に出力する。走行支援部16は、支援量増大部15から出力された増大量信号および別途求めた交通環境リスク係数TTCに基づいて走行支援量を求め、走行支援量に応じた走行支援量信号を警報装置8および走行制御装置9に出力する。支援量増大部15では、ドライバが脇見運転をし、機器操作を伴う場合には、機器操作の態様に応じた危険回避対応時間係数増大量を求める。
(もっと読む)
死角情報提供装置
【課題】簡易な装置構成で他車両に対して自車両が生成する死角内の情報を他車両に把握させることができる死角情報提供装置を提供することを目的とする。
【解決手段】死角情報提供装置2は、全方位カメラ10により車両1の周囲の画像を撮像し、車両1の周囲に存在する他車両の位置を認識する。死角情報提供装置2は、他車両を基準とした場合に、車両1の後方となり他車両から死角となる領域の画像を、他車両に対して送信する。
(もっと読む)
361 - 380 / 581
[ Back to top ]