
自車位置算出装置およびその算出方法
【課題】 走行中にナビゲーション装置がリセットされた場合であっても、自車位置の算出を精度良く行うことができる「自車位置算出装置およびその算出方法」を提供する。
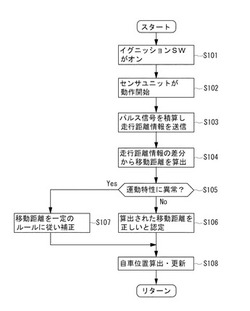
【解決手段】 車両の走行距離に応じて生成されるパスル信号に基づき自車位置を算出する自車位置算出方法は、パルス信号を積算し、積算されたパルス数に応じた走行距離情報を一定の周期で送信するステップ(S103)と、送信された走行距離情報の差分に基づき移動距離を算出するステップ(ステップS104)と、自車の運動特性から移動距離が異常であるか否かを判定するステップ(ステップS105)と、異常であると判定されたとき、算出された移動距離を補正するステップ(S106)と、補正された移動距離に基づき自車位置の算出・更新を行うステップ(S108)とを有する。
【解決手段】 車両の走行距離に応じて生成されるパスル信号に基づき自車位置を算出する自車位置算出方法は、パルス信号を積算し、積算されたパルス数に応じた走行距離情報を一定の周期で送信するステップ(S103)と、送信された走行距離情報の差分に基づき移動距離を算出するステップ(ステップS104)と、自車の運動特性から移動距離が異常であるか否かを判定するステップ(ステップS105)と、異常であると判定されたとき、算出された移動距離を補正するステップ(S106)と、補正された移動距離に基づき自車位置の算出・更新を行うステップ(S108)とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置における自車位置算出装置に関し、特に、自立航法に利用される走行距離情報を車両内通信バスにより受け取る自車位置算出装置に関する。
【背景技術】
【0002】
ナビゲーション装置は、自車位置を検出し、自車位置周辺の地図データをディスプレイに描画するとともに、地図上に車両マークを重ねて表示し、自車位置が変化すると、それに併せて地図をスクロールさせ道路地図を案内する機能を有している。また、目的地までの最適経路を探索し、探索された経路をディスプレイに表示し、同時に、探索経路による目的地までの到着時刻等を併せて表示している。
【0003】
ナビゲーション装置には、車両に搭載された距離センサや方位センサから自車位置を算出する自立航法と、衛星を利用したGPS測位により自車位置を算出する方法が実用化されている。自立航法用の距離センサは、例えば車速パルスを利用したものがあり、車速パルスは、車両が一定の距離を走行するたびにパルス信号を出力する。また、方位センサは、例えばジャイロスコープが利用されている。自立航法による自車位置の算出または更新は、距離センサにより得られた移動距離と方位センサにより得られた移動方向のベクトルを合成することにより計算される。
【0004】
自立航法は、比較的簡単な構成で自車位置を算出することができるが、相対的な位置検出であるため、高精度な位置測位を行うことが難しい。すなわち、自車が走行するにつれ誤差が累積し、自車位置の精度が悪化する。この精度の悪化を補償するために、地図データベースに含まれる道路(リンク)データを利用した、いわゆるマップマッチング処理が行われている。リンクデータは、道路の緯度、経度情報を含むものであり、自立航法により算出された自車位置を、リンクデータに照合させることで、自車位置の校正または修正を行っている。
【0005】
一方、GPS測位は、地球を周回する複数のGPS衛星の距離を測位し、3角測量の原理で車両位置を計算する。1回の位置測定に4個の衛星を使って3次元位置(経度、緯度、高度)を測定する3次元測位と、3つの衛星を使って2次元位置(経度、緯度)を測定する2次元測位がある。GPS測位は、絶対位置を検出することができるが、その精度は、電波受信状況に影響されやすく、常に精度が良いとは限らない。
【0006】
そこで、従来のナビゲーション装置は、自立航法とGPS測位のそれぞれの短所を補うべく、自立航法とGPS測位を併用したハイブリッド式を主流としている。
【0007】
特許文献1は、ハイブリッド式のナビゲーション装置において、車両用計器装置がバスを介して車両走行距離に応じたパルス信号を入力できなかった場合には、車両用計器装置は、前回入力した値と前々回入力した値との変化量から今回入力する予定であった値の推定値を求め、この推定値をナビゲーションユニットへ送信している。ナビゲーションユニットは、推定値に基づき車両の現在位置を算出している。
【0008】
特許文献2は、車両用現在位置検出装置に関し、車速センサからのパルス情報がある程度精度が悪いものであっても、それに基づいて精度の高い移動距離を算出し、現在位置の検出精度を向上させる技術を開示している。具体的には、車両の低速時に生じ易い車速パルス抜け期間に、車速パルス抜け期間前後の車両走行加速度に基づいて推定した距離により車両の移動距離を推測するものである。
【0009】
【特許文献1】特開2001−124572号
【特許文献2】特許3449240号
【発明の開示】
【発明が解決しようとする課題】
【0010】
特許文献1に開示されるように、車両の各部に設定されて車両の各部の情報や走行情報を出力するセンサ(例えば、走行距離に応じたパルス信号を出力する距離センサ、エンジンの回転数に応じたパルス信号を出力する回転センサ、燃料残量を出力する燃料センサなど)は、車両の内部に引き回し配線された車内用通信バスを介してナビゲーション装置に接続されている。これにより、ナビゲーション装置は、車内用通信バスを介して、自車位置の算出等に必要なデータを適宜取得している。
【0011】
ナビゲーション装置において自立航法による自車位置を算出する場合、距離センサからのパルス信号またはそれに対応する走行距離情報に基づき、自車の相対的な移動距離を算出する。しかしながら、バス通信システムが正常に動作しているにもかかわらず、ナビゲーション装置が、何らかの理由、例えば、電源電圧降下、システムハングアップによりリセットされることがある。その場合、バス通信により正しい走行距離情報を取得しても、ナビゲーション装置側の走行距離情報が初期化されゼロになるため、今回の走行距離情報と前回の走行距離情報の差分が非常に大きな値となり、言い換えれば、移動距離が極端に大きな値となり、その結果、ディスプレイに表示される自車位置が間違って大きく飛んでしまうという課題があった。
【0012】
本発明は、上記従来の課題を解決し、走行中にナビゲーション装置がリセットされた場合であっても、自車位置の算出を精度良く行うことができる自車位置算出装置およびその算出方法を提供することを目的とする。
【課題を解決するための手段】
【0013】
本発明に係る自車位置算出装置は、車両が一定距離を走行するたびにパルス信号を生成する第1の生成手段と、第1の生成手段により生成されたパルス信号を積算することにより車両の走行距離情報を生成する第2の生成手段と、第2の生成手段により生成された走行距離情報を一定の周期で受け取り、走行距離情報の差分に基づき自車の移動距離を算出する移動距離算出手段と、自車の運動特性に基づき移動距離が異常であるか否かを判定する判定手段と、移動距離が異常であると判定したとき、移動距離算出手段により算出された移動距離を補正する補正手段とを有する。
【0014】
好ましくは自車位置算出装置はさらに、車両内通信バスを含み、第2の生成手段により生成された走行距離情報は、車両内通信バスを介して自車位置算出手段に送信される。車両内通信バスは、外部バス、内部バス等であってもよく、その種類は特に制限されるものではない。例えば、CANバス、MOSTバスなどが用いられる。
【0015】
さらに本発明に係る、車両が一定距離を移動するたびに生成されるパルス信号に基づき自車位置を算出可能な自車位置算出装置は、一定期間内にパルス信号を受け取り、その間のパルス数をカウントすることで積算されたパルス数に応じた走行距離情報を一定の周期で送信する走行距離情報生成手段と、走行距離情報生成手段から出力された走行距離情報に基づき自車の相対的な移動距離を算出する移動距離算出手段とを有する。好ましくは、走行距離情報生成手段は、車両内通信バスを介して走行距離情報を移動距離算出手段に送信する。走行距離情報生成手段は、距離センサを含むものであっても良い。
【0016】
このように、自立航法に利用される移動距離の算出にあたって、距離センサからのパルス信号の差分(車両の走行距離情報の差分)ではなく、パルス信号のパルス数を積算し、積算されたパルス数に応じた走行距離情報を送信することで、バス通信による走行距離情報の取得に失敗しても、次に成功すれば正しい移動距離を取得することができるという長所がある。
【0017】
さらに本発明に係る、車両の走行距離に応じて生成されるパスル信号に基づき自車位置を算出する自車位置算出方法は、パルス信号を積算し、積算されたパルス数に応じた走行距離情報を生成する第1のステップと、走行距離情報を一定の周期で送信する第2のステップと、走行距離情報を受信し、走行距離情報の差分に基づき自車の移動距離を算出する第3のステップと、自車の運動特性から移動距離が異常であるか否かを判定する第4のステップと、異常であると判定されたとき、第3のステップで算出された移動距離を補正する第5のステップと、補正された移動距離に基づき自車位置を算出する第6のステップとを有する。
【発明の効果】
【0018】
本発明によれば、一定の周期で受け取った走行距離情報に基づき自車の移動距離を算出するに際して、自車の運動特性から移動距離(または自車位置)が異常であるか否かを判定し、異常であると判定した場合には、移動距離を補正するようにしたので、仮に、自車位置算出装置(例えば、ナビゲーション装置)が何らかの理由によりリセット若しくは初期化されても、その間の自車位置の算出を精度良く行うことができる。
【発明を実施するための最良の形態】
【0019】
本発明の最良の実施の形態について図面を参照して詳細に説明する。
【実施例】
【0020】
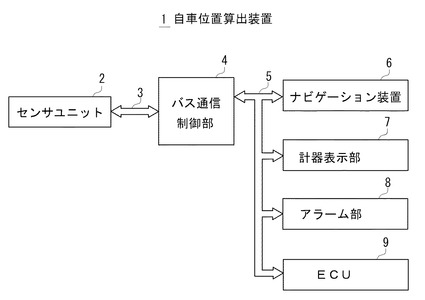
図1は、本発明の実施例に係る自車位置算出装置の構成を示すブロック図である。自車位置算出装置1は、自車の各部に設置され車両の状態を検知するセンサユニット2と、センサユニット2と外部バス3を介して接続されたバス通信制御部4と、バス通信制御部4と内部バス5を介して接続されたナビゲーション装置6を含んで構成される。内部バス5には、ナビゲーション装置6のほかに、車両のフロントパネル等に組み込まれた計器表示部7、各種警報を報知するアラーム部8、エンジン制御ユニット(ECU)9等が接続されている。
【0021】
センサユニット10は、自車が一定の距離を走行するたびにパルス信号を出力する距離センサ、自車の方位を検出するジャイロセンサ、エンジンの回転数に応じたパルス信号を出力する回転センサ、燃料残量を出力する燃料センサ、パーキングブレーキのオン・オフ状態を示すパーキングセンサなどを含んでいる。距離センサは、例えば自車の車輪に複数の位置センサを等間隔にて取り付けることで、タイヤが1回転するたびに、複数のパルス列を含むパルス信号を生成する。センサユニット2のうち、距離センサとジャイロセンサは、自立航法により自車位置を算出するためのセンサとして利用される。
【0022】
センサユニット2からの各種信号は、バス通信制御部4の外部バス入力に出力される。バス通信制御部4は、距離センサからパルス信号を受け取ると、受け取ったパルス数を加算もしくは積算し、その積算したパルス数に応じた走行距離情報を送信する。すなわち、パルス信号の差分(自車の走行距離の差分)を出力するのではなく、パルス数のカウント結果に応じた走行距離情報を送信する。バス通信制御部4は、例えば16ビット(2バイト)データの走行距離情報を、一定の周期、例えば40msで内部バス5に送信する。また、バス通信制御部4は、その他のセンサからの信号についても必要に応じた処理を施し、その信号を内部バス5に出力する。
【0023】
ナビゲーション装置6は、バス通信制御部4から内部バス5を介して走行距離情報やジャイロセンサの方位情報を受け取り、これらの情報に基づき自車位置を算出する。計器表示部7は、エンジン回転数や燃料残量に関する信号を内部バス5を介して受け取り、これらを計器類に表示する。アラーム部8は、安全運転に支障をきたすような状況を音声等により報知する。ECU9は、センサユニット2からの信号に基づき最適なエンジン動作の制御を行う。
【0024】
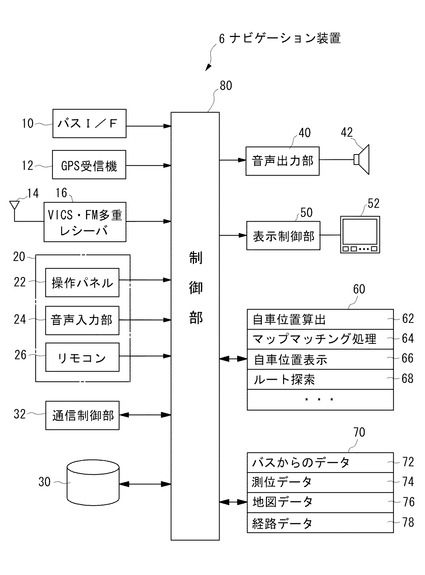
図2は、ナビゲーション装置6の構成を示す図図である。同図に示すように、ナビゲーション装置6は、内部バス5と接続されるバスインターフェース10、GPS衛星からの電波を受信して車両の現在位置と現在方位を測位するGPS受信機12、アンテナ14を介して車両外部の現在の道路交通情報を受信するVICS(Vehicle Information and Communication System)・FM多重レシーバ16、操作パネル22、音声入力部24およびリモコン操作部26を含むユーザー入力インターフェース20、大容量のハードディスクを有する記憶装置30、無線または有線によりデータ通信を可能とするデータ通信制御部32、スピーカ42から音声を出力させる音声出力部40、ディスプレイ52に画像を表示させる表示制御部50、プログラムを記憶するプログラムメモリ60、データを一時記憶するデータメモリ70、および制御部80を含んでいる。
【0025】
記憶装置30は、ナビゲーションの各種機能を実行するためのプログラムおよびデータベースを記憶する。データベースは、地図データ、施設データ等を含み、地図データは、道路に関するリンク(道路)データおよび交差点データを含む。リンクデータは、交差点と交差点とを連結する道路に関するデータであり、道路の始点と終点の経緯度を示すノードデータ、道路の種別(国道、一般道、県道など)を示すデータ、幅員、規制(例えば、一方通行)、車線数などのデータを含んでいる。
【0026】
プログラムメモリ60は、記憶装置30に記憶されたプログラムをロードする。例えば、センサユニット2からの走行距離情報および方位情報に基づく自立航法による自車位置の算出やGPS受信機12の測位結果に基づく自車位置の算出を行う自車位置算出プログラム62、自車位置を地図データの道路(リンク)上にマップマッチングするプログラム64、自車位置を道路地図上に合成しディスプレイに表示する自車位置表示プログラム66、目的地までのルートを探索するプログラム68等を格納する。データメモリ70は、バス通信制御部4からのデータ72、GPS受信機10により測位された測位データ74、記憶装置30から読み出された自車位置に対応する地図データ76、ルート探索された経路データ78等を記憶する。制御部80は、これらのプログラムに従い、各部の動作を制御する。
【0027】
次に、自車位置算出の動作について図3のフローチャートを参照して説明する。自車のイグニッションがオンされると(ステップS101)、センサユニット2の動作が開始される(ステップS102)。同時に、ナビゲーション装置のGPS受信機12の測位が開始される。
【0028】
自車の走行に伴い、距離センサは、一定の距離を走行するたびに複数のパルス列を含むパルス信号を出力する。バス通信制御部4は、受け取ったパルス信号を処理し、一定の周期(例えば、40ms)ごとに、積算または加算されたパルス数に応じた走行距離情報を送信する(ステップS103)。
【0029】
図4(a)は、走行距離情報を説明する図であり、ここでは、説明を分かり易くするために簡単な数字を用いている。バス通信制御部4は、時刻t1のとき、前回までに積算されたパルス数に今回受け取ったパルス数を加算し、その積算値「9999」を走行距離情報として内部バス5に送信する。次の周期である時刻t2のとき、一定期間内に距離センサから受け取ったパルス数が「1」であれば、その積算値「10000」を走行距離情報として内部バス5に送信する。次の周期である時刻t3のとき、一定期間内に距離センサから受け取ったパルス数が「2」であれば、その積算値「10002」を送信し、次の周期である時刻t4のとき、受け取ったパルス数が「1」であれば、その積算値「10003」を走行距離情報として内部バス5に送信する。
【0030】
ナビゲーション装置6は、バスインターフェース10を介して走行距離情報を受け取り、これをデータメモリ70に蓄積する。制御部80は、データメモリ70に蓄積された前回受け取った走行距離情報と今回受け取った走行距離情報の差分から自車の移動距離を算出する(ステップS104)。図4(a)に示すように、ナビゲーション装置6の制御部80は、時刻t2において今回の走行距離情報を受け取り、前回の走行距離情報との差分を算出する。この例では、「10000」と「9999」の差分を計算し、差分「1」に対応する移動距離を求める。次の周期である時刻t3においても、同様に今回の走行距離情報と前回の走行距離情報の差分を求め、当該差分に対応する移動距離を算出する。
【0031】
次に、制御部80は、算出された移動距離に基づき自車の運動特性が異常であるか否かを判定する(ステップS105)。例えば、算出された移動距離が極端に大きく、そのような移動を実現するには、自車の通常想定される範囲を超える運動特性を必要とされるとき、異常と判定する。このような異常が発生する原因の一つは、ナビゲーション装置が何らかの理由、例えば、電源電圧降下、システムハングアップによりリセットまたは初期化された場合である。ナビゲーション装置がリセットされてしまうと、バス通信制御部4から受信した走行距離情報が初期化され、その値が「0」になってしまい、走行距離情報の差分が異常に大きな値になるためである。
【0032】
例えば、図4(b)に示すように、時刻t3を含む期間においてナビゲーション装置がリセットされ、復旧したとする。この場合、バス通信制御部4は、時刻t3において走行距離情報を正常に送信しているが、ナビゲーション装置6は、バスインターフェース10を介して走行距離情報を取得することができず、今回の走行距離情報が初期化された状態の値「0」になってしまう。このため、時刻t4において移動距離を算出するにあたって、前回の走行距離情報と今回の走行距離情報との差分、すなわち、「0」と「10003」の差分が異常に大きな値となり、移動距離が極端に大きくなる。こうした大きな移動距離が発生しても、バス通信側には何ら異常は生じていないため、自車の運動特性から、移動距離が異常か否かを判定する。
【0033】
一方、自車の運動特性が異常なければ、走行距離情報の差分により算出された移動距離を正しい値と認定する(ステップS106)。自車の運動特性が異常であると判定した場合には、制御部80は、予め決められた方法に従い移動距離を補正する(ステップS107)。
【0034】
次に、制御部80は、算出された移動距離とジャイロセンサからの方位情報のベクトルを合成し、これを現在位置に足し込むことで、自立航法による自車位置の算出および更新を行う(ステップS108)。
【0035】
次に、自車の運動特性の判定方法および移動距離の補正方法について図5ないし図7のフローを参照して説明する。
【0036】
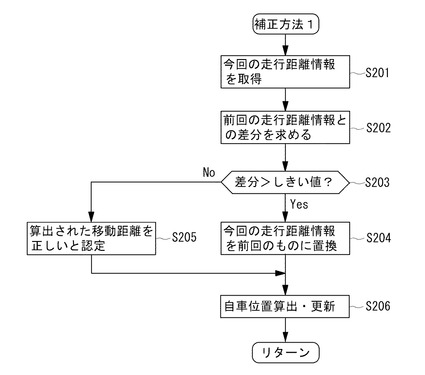
(第1の補正方法)
制御部80は、バス通信制御部4から今回の走行距離情報を受け取ると(ステップS201)、今回の走行距離情報と前回の走行距離情報の差分を求め(ステップS202)、当該差分が、しきい値より大きいか否かを判定する(ステップS203)。一定のしきい値より大きいとき、これは、運動特性の異常を意味する。
【0037】
運動特性の異常があるとき、制御部80は、今回の走行距離情報を前回の走行距離情報に置き換える(ステップS204)。図4(b)を例にすると、仮にしきい値が「100」とすれば、時刻t4のける差分が「10003」であり、異常と判定される。従って、図4(c)に示すように、時刻t3におけるナビゲーション装置の走行距離情報を時刻t2の走行距離情報に置換する。これにより時刻t4の差分が「3」となり、ナビゲーション装置がリセットしている間の移動距離が補正される。自車が一定の速度で走行している場合には、ほぼ正確な移動距離の補正となる。
【0038】
なお、図4(b)の時刻t3において、ナビゲーション装置側の差分を「0」としているが、リセット中であっても前回の走行距離情報との差分が適切に算出される場合には、時刻t2と時刻t3の差分は「10000」となるが、この場合にも、時刻t3の走行距離情報が時刻t2の走行距離情報に置換されるため、結果的に差分は「0」となる(図4(c)参照)。
【0039】
差分がしきい値以下であれば、今回の走行距離情報と前回の走行距離情報の差分により算出された移動距離を正しい値と認定する(ステップS205)。制御部80は、上記のようにして得られた移動距離と方位情報を用いて自車位置の算出および更新を行う(ステップS206)。
【0040】
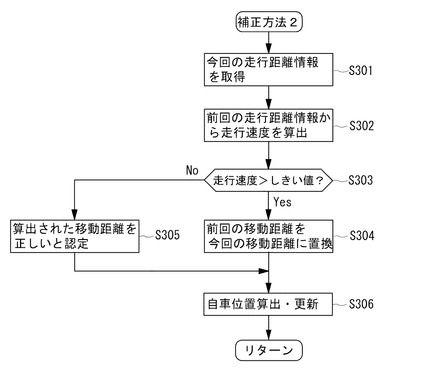
(第2の補正方法)
制御部80は、バス通信制御部4から今回の走行距離情報を受け取ると(ステップS301)、今回の走行距離情報と前回の走行距離情報から自車の走行速度を算出し(ステップS302)、当該走行速度が、しきい値より大きいか否かを判定する(ステップS303)。このしきい値は、例えば、自車の最高速度を設定する。走行速度が最高速度(しきい値)より大きいとき、これは、自車の運動特性の異常を意味する。この場合、制御部80は、前回の算出された移動距離を今回の移動距離に置換する(ステップS304)。言い換えれば、前回のときに求められた差分に置換する。
【0041】
走行速度がしきい値以下であれば、今回の走行距離情報と前回の走行距離情報の差分により算出された移動距離を正しい値と認定する(ステップS305)。制御部80は、上記のようにして得られた移動距離と方位情報を用いて自車位置の算出および更新を行う(ステップS306)。
【0042】
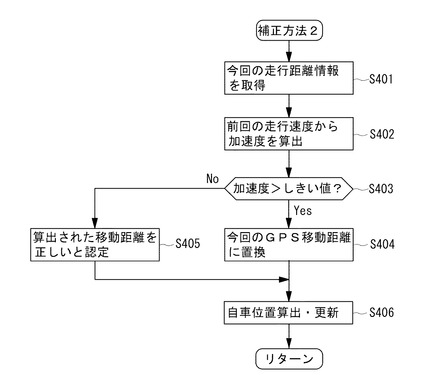
(第3の補正方法)
制御部80は、バス通信制御部4から今回の走行距離情報を受け取ると(ステップS401)、今回の走行速度と前回の走行速度から自車の加速度を算出し(ステップS402)、当該加速度が、しきい値より大きいか否かを判定する(ステップS303)。このしきい値は、例えば、自車の性能限界を超える加速度を設定する。加速度がしきい値より大きいとき、これは、自車の運動特性の異常を意味する。この場合、制御部80は、現在のGPS受信機12により測位された自車速度から移動距離を算出し、これを今回の移動距離に置換する
(ステップS404)。
【0043】
加速度がしきい値以下であれば、今回の走行距離情報と前回の走行距離情報の差分により算出された移動距離を正しい値と認定する(ステップS405)。制御部80は、上記のようにして得られた移動距離と方位情報を用いて自車位置の算出および更新を行う(ステップS406)。
【0044】
第1ないし第3の補正方法において、それぞれ異なる運動特性の判定基準を用いたが、それらの組み合わせは適宜変更してもよい。例えば、第1の補正方法において、自車の走行速度がしきい値よりも大きいか否かを判定したり、加速度がしきい値よりも大きいか否かを判定するようにしてもよい。
【0045】
さらに、ナビゲーション装置がリセットするときに要する時間Tcが予め分かっているときは(例えば、ダウンから復旧するまでに要する時間が3秒)、自車の運動特性に異常があるという判定を行った時点から、上記した時間Tcの期間を、上記した第1ないし第3の移動距離の補正を継続するようにしてもよい。
【0046】
本実施例によれば、バス通信制御部4から積算若しくは加算された走行距離情報を取得することにより自車位置を算出するナビゲーション装置において、ナビゲーション装置が何らかの理由により一時的にダウンし、走行距離情報を適切に処理できないような状況になったとしても、その間の自車の移動距離を適切に補正するようにしたため、自車位置精度の劣化を防止することができる。
【0047】
以上、本発明の好ましい実施の形態について詳述したが、本発明は係る特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能である。上記実施例では、センサユニット2とバス通信制御部4が外部バス3により接続される構成を示したが、センサユニット2は、パルス数を積算し積算した走行距離情報を送信する回路を包含し、センサユニット2から直接、走行距離情報をナビゲーション装置6に送信するようにしてもよい。あるいは、バス通信制御部4が距離センサを包含するようにしてもよい。さらに、上記実施例では、自車位置算出の動作をプログラムによる制御としたが、必ずしもこれに限らず、ハードウエハ回路によって実行するようにしてもよい。さらに、ナビゲーション装置は、他のオーディオ装置やビデオ装置と複合的なものであっても良い。
【産業上の利用可能性】
【0048】
本発明に係る自車位置算出装置および算出方法は、車両等に搭載されるナビゲーション装置、ナビゲーションシステム、あるいはナビゲーション機能を包含するコンピュータ等の電子装置において利用することができる。
【図面の簡単な説明】
【0049】
【図1】本発明の実施例に係る自車位置算出装置の構成を示すブロック図である。
【図2】ナビゲーション装置の構成を示すブロック図である。
【図3】本実施例の自車位置算出装置の動作を説明するフローチャートである。
【図4】バス通信制御部におけるパルス数を積算した走行距離情報を説明する図である。
【図5】移動距離の第1の補正方法を説明する動作フローチャートである。
【図6】移動距離の第2の補正方法を説明する動作フローチャートである。
【図7】移動距離の第3の補正方法を説明する動作フローチャートである。
【符号の説明】
【0050】
1:自車位置算出装置 2:センサユニット
3:外部バス 4:バス通信制御部
5:内部バス 6:ナビゲーション装置
7:計器表示部 8:アラーム部
9:エンジン制御ユニット(ECU) 10:バスインターフェース
12:GPS受信機 40:音声出力部
50:表示制御部 52:ディスプレイ
60:プログラムメモリ 70:データメモリ
80:制御部
【技術分野】
【0001】
本発明は、ナビゲーション装置における自車位置算出装置に関し、特に、自立航法に利用される走行距離情報を車両内通信バスにより受け取る自車位置算出装置に関する。
【背景技術】
【0002】
ナビゲーション装置は、自車位置を検出し、自車位置周辺の地図データをディスプレイに描画するとともに、地図上に車両マークを重ねて表示し、自車位置が変化すると、それに併せて地図をスクロールさせ道路地図を案内する機能を有している。また、目的地までの最適経路を探索し、探索された経路をディスプレイに表示し、同時に、探索経路による目的地までの到着時刻等を併せて表示している。
【0003】
ナビゲーション装置には、車両に搭載された距離センサや方位センサから自車位置を算出する自立航法と、衛星を利用したGPS測位により自車位置を算出する方法が実用化されている。自立航法用の距離センサは、例えば車速パルスを利用したものがあり、車速パルスは、車両が一定の距離を走行するたびにパルス信号を出力する。また、方位センサは、例えばジャイロスコープが利用されている。自立航法による自車位置の算出または更新は、距離センサにより得られた移動距離と方位センサにより得られた移動方向のベクトルを合成することにより計算される。
【0004】
自立航法は、比較的簡単な構成で自車位置を算出することができるが、相対的な位置検出であるため、高精度な位置測位を行うことが難しい。すなわち、自車が走行するにつれ誤差が累積し、自車位置の精度が悪化する。この精度の悪化を補償するために、地図データベースに含まれる道路(リンク)データを利用した、いわゆるマップマッチング処理が行われている。リンクデータは、道路の緯度、経度情報を含むものであり、自立航法により算出された自車位置を、リンクデータに照合させることで、自車位置の校正または修正を行っている。
【0005】
一方、GPS測位は、地球を周回する複数のGPS衛星の距離を測位し、3角測量の原理で車両位置を計算する。1回の位置測定に4個の衛星を使って3次元位置(経度、緯度、高度)を測定する3次元測位と、3つの衛星を使って2次元位置(経度、緯度)を測定する2次元測位がある。GPS測位は、絶対位置を検出することができるが、その精度は、電波受信状況に影響されやすく、常に精度が良いとは限らない。
【0006】
そこで、従来のナビゲーション装置は、自立航法とGPS測位のそれぞれの短所を補うべく、自立航法とGPS測位を併用したハイブリッド式を主流としている。
【0007】
特許文献1は、ハイブリッド式のナビゲーション装置において、車両用計器装置がバスを介して車両走行距離に応じたパルス信号を入力できなかった場合には、車両用計器装置は、前回入力した値と前々回入力した値との変化量から今回入力する予定であった値の推定値を求め、この推定値をナビゲーションユニットへ送信している。ナビゲーションユニットは、推定値に基づき車両の現在位置を算出している。
【0008】
特許文献2は、車両用現在位置検出装置に関し、車速センサからのパルス情報がある程度精度が悪いものであっても、それに基づいて精度の高い移動距離を算出し、現在位置の検出精度を向上させる技術を開示している。具体的には、車両の低速時に生じ易い車速パルス抜け期間に、車速パルス抜け期間前後の車両走行加速度に基づいて推定した距離により車両の移動距離を推測するものである。
【0009】
【特許文献1】特開2001−124572号
【特許文献2】特許3449240号
【発明の開示】
【発明が解決しようとする課題】
【0010】
特許文献1に開示されるように、車両の各部に設定されて車両の各部の情報や走行情報を出力するセンサ(例えば、走行距離に応じたパルス信号を出力する距離センサ、エンジンの回転数に応じたパルス信号を出力する回転センサ、燃料残量を出力する燃料センサなど)は、車両の内部に引き回し配線された車内用通信バスを介してナビゲーション装置に接続されている。これにより、ナビゲーション装置は、車内用通信バスを介して、自車位置の算出等に必要なデータを適宜取得している。
【0011】
ナビゲーション装置において自立航法による自車位置を算出する場合、距離センサからのパルス信号またはそれに対応する走行距離情報に基づき、自車の相対的な移動距離を算出する。しかしながら、バス通信システムが正常に動作しているにもかかわらず、ナビゲーション装置が、何らかの理由、例えば、電源電圧降下、システムハングアップによりリセットされることがある。その場合、バス通信により正しい走行距離情報を取得しても、ナビゲーション装置側の走行距離情報が初期化されゼロになるため、今回の走行距離情報と前回の走行距離情報の差分が非常に大きな値となり、言い換えれば、移動距離が極端に大きな値となり、その結果、ディスプレイに表示される自車位置が間違って大きく飛んでしまうという課題があった。
【0012】
本発明は、上記従来の課題を解決し、走行中にナビゲーション装置がリセットされた場合であっても、自車位置の算出を精度良く行うことができる自車位置算出装置およびその算出方法を提供することを目的とする。
【課題を解決するための手段】
【0013】
本発明に係る自車位置算出装置は、車両が一定距離を走行するたびにパルス信号を生成する第1の生成手段と、第1の生成手段により生成されたパルス信号を積算することにより車両の走行距離情報を生成する第2の生成手段と、第2の生成手段により生成された走行距離情報を一定の周期で受け取り、走行距離情報の差分に基づき自車の移動距離を算出する移動距離算出手段と、自車の運動特性に基づき移動距離が異常であるか否かを判定する判定手段と、移動距離が異常であると判定したとき、移動距離算出手段により算出された移動距離を補正する補正手段とを有する。
【0014】
好ましくは自車位置算出装置はさらに、車両内通信バスを含み、第2の生成手段により生成された走行距離情報は、車両内通信バスを介して自車位置算出手段に送信される。車両内通信バスは、外部バス、内部バス等であってもよく、その種類は特に制限されるものではない。例えば、CANバス、MOSTバスなどが用いられる。
【0015】
さらに本発明に係る、車両が一定距離を移動するたびに生成されるパルス信号に基づき自車位置を算出可能な自車位置算出装置は、一定期間内にパルス信号を受け取り、その間のパルス数をカウントすることで積算されたパルス数に応じた走行距離情報を一定の周期で送信する走行距離情報生成手段と、走行距離情報生成手段から出力された走行距離情報に基づき自車の相対的な移動距離を算出する移動距離算出手段とを有する。好ましくは、走行距離情報生成手段は、車両内通信バスを介して走行距離情報を移動距離算出手段に送信する。走行距離情報生成手段は、距離センサを含むものであっても良い。
【0016】
このように、自立航法に利用される移動距離の算出にあたって、距離センサからのパルス信号の差分(車両の走行距離情報の差分)ではなく、パルス信号のパルス数を積算し、積算されたパルス数に応じた走行距離情報を送信することで、バス通信による走行距離情報の取得に失敗しても、次に成功すれば正しい移動距離を取得することができるという長所がある。
【0017】
さらに本発明に係る、車両の走行距離に応じて生成されるパスル信号に基づき自車位置を算出する自車位置算出方法は、パルス信号を積算し、積算されたパルス数に応じた走行距離情報を生成する第1のステップと、走行距離情報を一定の周期で送信する第2のステップと、走行距離情報を受信し、走行距離情報の差分に基づき自車の移動距離を算出する第3のステップと、自車の運動特性から移動距離が異常であるか否かを判定する第4のステップと、異常であると判定されたとき、第3のステップで算出された移動距離を補正する第5のステップと、補正された移動距離に基づき自車位置を算出する第6のステップとを有する。
【発明の効果】
【0018】
本発明によれば、一定の周期で受け取った走行距離情報に基づき自車の移動距離を算出するに際して、自車の運動特性から移動距離(または自車位置)が異常であるか否かを判定し、異常であると判定した場合には、移動距離を補正するようにしたので、仮に、自車位置算出装置(例えば、ナビゲーション装置)が何らかの理由によりリセット若しくは初期化されても、その間の自車位置の算出を精度良く行うことができる。
【発明を実施するための最良の形態】
【0019】
本発明の最良の実施の形態について図面を参照して詳細に説明する。
【実施例】
【0020】
図1は、本発明の実施例に係る自車位置算出装置の構成を示すブロック図である。自車位置算出装置1は、自車の各部に設置され車両の状態を検知するセンサユニット2と、センサユニット2と外部バス3を介して接続されたバス通信制御部4と、バス通信制御部4と内部バス5を介して接続されたナビゲーション装置6を含んで構成される。内部バス5には、ナビゲーション装置6のほかに、車両のフロントパネル等に組み込まれた計器表示部7、各種警報を報知するアラーム部8、エンジン制御ユニット(ECU)9等が接続されている。
【0021】
センサユニット10は、自車が一定の距離を走行するたびにパルス信号を出力する距離センサ、自車の方位を検出するジャイロセンサ、エンジンの回転数に応じたパルス信号を出力する回転センサ、燃料残量を出力する燃料センサ、パーキングブレーキのオン・オフ状態を示すパーキングセンサなどを含んでいる。距離センサは、例えば自車の車輪に複数の位置センサを等間隔にて取り付けることで、タイヤが1回転するたびに、複数のパルス列を含むパルス信号を生成する。センサユニット2のうち、距離センサとジャイロセンサは、自立航法により自車位置を算出するためのセンサとして利用される。
【0022】
センサユニット2からの各種信号は、バス通信制御部4の外部バス入力に出力される。バス通信制御部4は、距離センサからパルス信号を受け取ると、受け取ったパルス数を加算もしくは積算し、その積算したパルス数に応じた走行距離情報を送信する。すなわち、パルス信号の差分(自車の走行距離の差分)を出力するのではなく、パルス数のカウント結果に応じた走行距離情報を送信する。バス通信制御部4は、例えば16ビット(2バイト)データの走行距離情報を、一定の周期、例えば40msで内部バス5に送信する。また、バス通信制御部4は、その他のセンサからの信号についても必要に応じた処理を施し、その信号を内部バス5に出力する。
【0023】
ナビゲーション装置6は、バス通信制御部4から内部バス5を介して走行距離情報やジャイロセンサの方位情報を受け取り、これらの情報に基づき自車位置を算出する。計器表示部7は、エンジン回転数や燃料残量に関する信号を内部バス5を介して受け取り、これらを計器類に表示する。アラーム部8は、安全運転に支障をきたすような状況を音声等により報知する。ECU9は、センサユニット2からの信号に基づき最適なエンジン動作の制御を行う。
【0024】
図2は、ナビゲーション装置6の構成を示す図図である。同図に示すように、ナビゲーション装置6は、内部バス5と接続されるバスインターフェース10、GPS衛星からの電波を受信して車両の現在位置と現在方位を測位するGPS受信機12、アンテナ14を介して車両外部の現在の道路交通情報を受信するVICS(Vehicle Information and Communication System)・FM多重レシーバ16、操作パネル22、音声入力部24およびリモコン操作部26を含むユーザー入力インターフェース20、大容量のハードディスクを有する記憶装置30、無線または有線によりデータ通信を可能とするデータ通信制御部32、スピーカ42から音声を出力させる音声出力部40、ディスプレイ52に画像を表示させる表示制御部50、プログラムを記憶するプログラムメモリ60、データを一時記憶するデータメモリ70、および制御部80を含んでいる。
【0025】
記憶装置30は、ナビゲーションの各種機能を実行するためのプログラムおよびデータベースを記憶する。データベースは、地図データ、施設データ等を含み、地図データは、道路に関するリンク(道路)データおよび交差点データを含む。リンクデータは、交差点と交差点とを連結する道路に関するデータであり、道路の始点と終点の経緯度を示すノードデータ、道路の種別(国道、一般道、県道など)を示すデータ、幅員、規制(例えば、一方通行)、車線数などのデータを含んでいる。
【0026】
プログラムメモリ60は、記憶装置30に記憶されたプログラムをロードする。例えば、センサユニット2からの走行距離情報および方位情報に基づく自立航法による自車位置の算出やGPS受信機12の測位結果に基づく自車位置の算出を行う自車位置算出プログラム62、自車位置を地図データの道路(リンク)上にマップマッチングするプログラム64、自車位置を道路地図上に合成しディスプレイに表示する自車位置表示プログラム66、目的地までのルートを探索するプログラム68等を格納する。データメモリ70は、バス通信制御部4からのデータ72、GPS受信機10により測位された測位データ74、記憶装置30から読み出された自車位置に対応する地図データ76、ルート探索された経路データ78等を記憶する。制御部80は、これらのプログラムに従い、各部の動作を制御する。
【0027】
次に、自車位置算出の動作について図3のフローチャートを参照して説明する。自車のイグニッションがオンされると(ステップS101)、センサユニット2の動作が開始される(ステップS102)。同時に、ナビゲーション装置のGPS受信機12の測位が開始される。
【0028】
自車の走行に伴い、距離センサは、一定の距離を走行するたびに複数のパルス列を含むパルス信号を出力する。バス通信制御部4は、受け取ったパルス信号を処理し、一定の周期(例えば、40ms)ごとに、積算または加算されたパルス数に応じた走行距離情報を送信する(ステップS103)。
【0029】
図4(a)は、走行距離情報を説明する図であり、ここでは、説明を分かり易くするために簡単な数字を用いている。バス通信制御部4は、時刻t1のとき、前回までに積算されたパルス数に今回受け取ったパルス数を加算し、その積算値「9999」を走行距離情報として内部バス5に送信する。次の周期である時刻t2のとき、一定期間内に距離センサから受け取ったパルス数が「1」であれば、その積算値「10000」を走行距離情報として内部バス5に送信する。次の周期である時刻t3のとき、一定期間内に距離センサから受け取ったパルス数が「2」であれば、その積算値「10002」を送信し、次の周期である時刻t4のとき、受け取ったパルス数が「1」であれば、その積算値「10003」を走行距離情報として内部バス5に送信する。
【0030】
ナビゲーション装置6は、バスインターフェース10を介して走行距離情報を受け取り、これをデータメモリ70に蓄積する。制御部80は、データメモリ70に蓄積された前回受け取った走行距離情報と今回受け取った走行距離情報の差分から自車の移動距離を算出する(ステップS104)。図4(a)に示すように、ナビゲーション装置6の制御部80は、時刻t2において今回の走行距離情報を受け取り、前回の走行距離情報との差分を算出する。この例では、「10000」と「9999」の差分を計算し、差分「1」に対応する移動距離を求める。次の周期である時刻t3においても、同様に今回の走行距離情報と前回の走行距離情報の差分を求め、当該差分に対応する移動距離を算出する。
【0031】
次に、制御部80は、算出された移動距離に基づき自車の運動特性が異常であるか否かを判定する(ステップS105)。例えば、算出された移動距離が極端に大きく、そのような移動を実現するには、自車の通常想定される範囲を超える運動特性を必要とされるとき、異常と判定する。このような異常が発生する原因の一つは、ナビゲーション装置が何らかの理由、例えば、電源電圧降下、システムハングアップによりリセットまたは初期化された場合である。ナビゲーション装置がリセットされてしまうと、バス通信制御部4から受信した走行距離情報が初期化され、その値が「0」になってしまい、走行距離情報の差分が異常に大きな値になるためである。
【0032】
例えば、図4(b)に示すように、時刻t3を含む期間においてナビゲーション装置がリセットされ、復旧したとする。この場合、バス通信制御部4は、時刻t3において走行距離情報を正常に送信しているが、ナビゲーション装置6は、バスインターフェース10を介して走行距離情報を取得することができず、今回の走行距離情報が初期化された状態の値「0」になってしまう。このため、時刻t4において移動距離を算出するにあたって、前回の走行距離情報と今回の走行距離情報との差分、すなわち、「0」と「10003」の差分が異常に大きな値となり、移動距離が極端に大きくなる。こうした大きな移動距離が発生しても、バス通信側には何ら異常は生じていないため、自車の運動特性から、移動距離が異常か否かを判定する。
【0033】
一方、自車の運動特性が異常なければ、走行距離情報の差分により算出された移動距離を正しい値と認定する(ステップS106)。自車の運動特性が異常であると判定した場合には、制御部80は、予め決められた方法に従い移動距離を補正する(ステップS107)。
【0034】
次に、制御部80は、算出された移動距離とジャイロセンサからの方位情報のベクトルを合成し、これを現在位置に足し込むことで、自立航法による自車位置の算出および更新を行う(ステップS108)。
【0035】
次に、自車の運動特性の判定方法および移動距離の補正方法について図5ないし図7のフローを参照して説明する。
【0036】
(第1の補正方法)
制御部80は、バス通信制御部4から今回の走行距離情報を受け取ると(ステップS201)、今回の走行距離情報と前回の走行距離情報の差分を求め(ステップS202)、当該差分が、しきい値より大きいか否かを判定する(ステップS203)。一定のしきい値より大きいとき、これは、運動特性の異常を意味する。
【0037】
運動特性の異常があるとき、制御部80は、今回の走行距離情報を前回の走行距離情報に置き換える(ステップS204)。図4(b)を例にすると、仮にしきい値が「100」とすれば、時刻t4のける差分が「10003」であり、異常と判定される。従って、図4(c)に示すように、時刻t3におけるナビゲーション装置の走行距離情報を時刻t2の走行距離情報に置換する。これにより時刻t4の差分が「3」となり、ナビゲーション装置がリセットしている間の移動距離が補正される。自車が一定の速度で走行している場合には、ほぼ正確な移動距離の補正となる。
【0038】
なお、図4(b)の時刻t3において、ナビゲーション装置側の差分を「0」としているが、リセット中であっても前回の走行距離情報との差分が適切に算出される場合には、時刻t2と時刻t3の差分は「10000」となるが、この場合にも、時刻t3の走行距離情報が時刻t2の走行距離情報に置換されるため、結果的に差分は「0」となる(図4(c)参照)。
【0039】
差分がしきい値以下であれば、今回の走行距離情報と前回の走行距離情報の差分により算出された移動距離を正しい値と認定する(ステップS205)。制御部80は、上記のようにして得られた移動距離と方位情報を用いて自車位置の算出および更新を行う(ステップS206)。
【0040】
(第2の補正方法)
制御部80は、バス通信制御部4から今回の走行距離情報を受け取ると(ステップS301)、今回の走行距離情報と前回の走行距離情報から自車の走行速度を算出し(ステップS302)、当該走行速度が、しきい値より大きいか否かを判定する(ステップS303)。このしきい値は、例えば、自車の最高速度を設定する。走行速度が最高速度(しきい値)より大きいとき、これは、自車の運動特性の異常を意味する。この場合、制御部80は、前回の算出された移動距離を今回の移動距離に置換する(ステップS304)。言い換えれば、前回のときに求められた差分に置換する。
【0041】
走行速度がしきい値以下であれば、今回の走行距離情報と前回の走行距離情報の差分により算出された移動距離を正しい値と認定する(ステップS305)。制御部80は、上記のようにして得られた移動距離と方位情報を用いて自車位置の算出および更新を行う(ステップS306)。
【0042】
(第3の補正方法)
制御部80は、バス通信制御部4から今回の走行距離情報を受け取ると(ステップS401)、今回の走行速度と前回の走行速度から自車の加速度を算出し(ステップS402)、当該加速度が、しきい値より大きいか否かを判定する(ステップS303)。このしきい値は、例えば、自車の性能限界を超える加速度を設定する。加速度がしきい値より大きいとき、これは、自車の運動特性の異常を意味する。この場合、制御部80は、現在のGPS受信機12により測位された自車速度から移動距離を算出し、これを今回の移動距離に置換する
(ステップS404)。
【0043】
加速度がしきい値以下であれば、今回の走行距離情報と前回の走行距離情報の差分により算出された移動距離を正しい値と認定する(ステップS405)。制御部80は、上記のようにして得られた移動距離と方位情報を用いて自車位置の算出および更新を行う(ステップS406)。
【0044】
第1ないし第3の補正方法において、それぞれ異なる運動特性の判定基準を用いたが、それらの組み合わせは適宜変更してもよい。例えば、第1の補正方法において、自車の走行速度がしきい値よりも大きいか否かを判定したり、加速度がしきい値よりも大きいか否かを判定するようにしてもよい。
【0045】
さらに、ナビゲーション装置がリセットするときに要する時間Tcが予め分かっているときは(例えば、ダウンから復旧するまでに要する時間が3秒)、自車の運動特性に異常があるという判定を行った時点から、上記した時間Tcの期間を、上記した第1ないし第3の移動距離の補正を継続するようにしてもよい。
【0046】
本実施例によれば、バス通信制御部4から積算若しくは加算された走行距離情報を取得することにより自車位置を算出するナビゲーション装置において、ナビゲーション装置が何らかの理由により一時的にダウンし、走行距離情報を適切に処理できないような状況になったとしても、その間の自車の移動距離を適切に補正するようにしたため、自車位置精度の劣化を防止することができる。
【0047】
以上、本発明の好ましい実施の形態について詳述したが、本発明は係る特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能である。上記実施例では、センサユニット2とバス通信制御部4が外部バス3により接続される構成を示したが、センサユニット2は、パルス数を積算し積算した走行距離情報を送信する回路を包含し、センサユニット2から直接、走行距離情報をナビゲーション装置6に送信するようにしてもよい。あるいは、バス通信制御部4が距離センサを包含するようにしてもよい。さらに、上記実施例では、自車位置算出の動作をプログラムによる制御としたが、必ずしもこれに限らず、ハードウエハ回路によって実行するようにしてもよい。さらに、ナビゲーション装置は、他のオーディオ装置やビデオ装置と複合的なものであっても良い。
【産業上の利用可能性】
【0048】
本発明に係る自車位置算出装置および算出方法は、車両等に搭載されるナビゲーション装置、ナビゲーションシステム、あるいはナビゲーション機能を包含するコンピュータ等の電子装置において利用することができる。
【図面の簡単な説明】
【0049】
【図1】本発明の実施例に係る自車位置算出装置の構成を示すブロック図である。
【図2】ナビゲーション装置の構成を示すブロック図である。
【図3】本実施例の自車位置算出装置の動作を説明するフローチャートである。
【図4】バス通信制御部におけるパルス数を積算した走行距離情報を説明する図である。
【図5】移動距離の第1の補正方法を説明する動作フローチャートである。
【図6】移動距離の第2の補正方法を説明する動作フローチャートである。
【図7】移動距離の第3の補正方法を説明する動作フローチャートである。
【符号の説明】
【0050】
1:自車位置算出装置 2:センサユニット
3:外部バス 4:バス通信制御部
5:内部バス 6:ナビゲーション装置
7:計器表示部 8:アラーム部
9:エンジン制御ユニット(ECU) 10:バスインターフェース
12:GPS受信機 40:音声出力部
50:表示制御部 52:ディスプレイ
60:プログラムメモリ 70:データメモリ
80:制御部
【特許請求の範囲】
【請求項1】
自車位置を算出する自車位置算出装置であって、
車両が一定距離を走行するたびにパルス信号を生成する第1の生成手段と、
第1の生成手段により生成されたパルス信号を積算することにより車両の走行距離情報を生成する第2の生成手段と、
第2の生成手段により生成された走行距離情報を一定の周期で受け取り、走行距離情報の差分に基づき自車の移動距離を算出する移動距離算出手段と、
自車の運動特性に基づき移動距離が異常であるか否かを判定する判定手段と、
移動距離が異常であると判定したとき、移動距離算出手段により算出された移動距離を補正する補正手段と、
を有する、自車位置算出装置。
【請求項2】
自車位置算出装置はさらに、車両内通信バスを含み、第2の生成手段により生成された走行距離情報は、車両内通信バスを介して移動距離算出手段に送信される、請求項1に記載の自車位置算出装置。
【請求項3】
判定手段は、前回の走行距離情報と今回の走行距離情報の移動距離の差分が一定のしきい値を越えるとき、移動距離が異常であると判定する、請求項1または2に記載の自車位置算出装置。
【請求項4】
判定手段は、自車の走行速度が一定のしきい値を超えるとき、移動距離が異常であると判定する、請求項1または2に記載の自車位置算出装置。
【請求項5】
判定手段は、自車の加速度が一定のしきい値を超えるとき、移動距離が異常であると判定する、請求項1または2に記載の自車位置算出装置。
【請求項6】
補正手段は、第2の生成手段から得られた今回の走行距離情報を前回の走行距離情報に置換する、請求項1ないし5いずれか1つに記載の自車位置算出装置。
【請求項7】
補正手段は、今回の移動距離を、前回の算出された移動距離に置換する、請求項1ないし5いずれか1つに記載の自車位置算出装置。
【請求項8】
補正手段は、今回の移動距離を、GPS測位から得られた移動距離に置換する、請求項1ないし5いずれか1つに記載の自車位置算出装置。
【請求項9】
補正手段は、判定手段により自車位置が異常であると判定されたとき、予め設定された期間中、移動距離の補正を継続する、請求項1ないし8いずれか1つに記載の自車位置算出装置。
【請求項10】
自車位置算出装置はさらに、算出された移動距離と自車の方位情報に基づき自車位置を算出する自車位置算出手段を有する、請求項1ないし9いずれか1つに記載の自車位置算出装置。
【請求項11】
車両が一定距離を移動するたびに生成されるパルス信号に基づき自車位置を算出可能な自車位置算出装置であって、
一定期間内にパルス信号を受け取り、その間のパルス数をカウントすることで積算されたパルス数に応じた走行距離情報を一定の周期で送信する走行距離情報生成手段と、
走行距離情報生成手段から出力された走行距離情報に基づき自車の相対的な移動距離を算出する移動距離算出手段と、
を有する、自車位置算出装置。
【請求項12】
走行距離情報生成手段は、車両内通信バスを介して走行距離情報を移動距離算出手段に送信する、請求項11に記載の自車位置算出装置。
【請求項13】
走行距離情報生成手段は、車両が一定距離を移動するたびにパスル信号を出力する距離センサを含む、請求項11または12に記載の自車位置算出装置。
【請求項14】
車両の走行距離に応じて生成されるパスル信号に基づき自車位置を算出する自車位置算出方法であって、
パルス信号を積算し、積算されたパルス数に応じた走行距離情報を生成する第1のステップと、
走行距離情報を一定の周期で送信する第2のステップと、
走行距離情報を受信し、走行距離情報の差分に基づき自車の移動距離を算出する第3のステップと、
自車の運動特性から移動距離が異常であるか否かを判定する第4のステップと、
異常であると判定されたとき、第3のステップで算出された移動距離を補正する第5のステップと、
補正された移動距離に基づき自車位置を算出する第6のステップと、
を有する、自車位置算出方法。
【請求項15】
第4のステップは、自車の走行速度が一定のしきい値を超えたとき、または自車の加速度の差分が一定のしきい値を超えたとき、移動距離が異常であると判定する、請求項14に記載の自車位置算出方法。
【請求項16】
第5のステップは、今回受け取った走行距離情報を、前回受け取った走行距離情報に置換する、請求項14に記載の自車位置算出方法。
【請求項17】
第5のステップは、今回の移動距離を、前回の算出された移動距離に置換する、請求項14に記載の自車位置算出方法。
【請求項18】
第5のステップは、今回の移動距離を、GPS測位から得られた移動距離に置換する、請求項14に記載の自車位置算出装置。
【請求項1】
自車位置を算出する自車位置算出装置であって、
車両が一定距離を走行するたびにパルス信号を生成する第1の生成手段と、
第1の生成手段により生成されたパルス信号を積算することにより車両の走行距離情報を生成する第2の生成手段と、
第2の生成手段により生成された走行距離情報を一定の周期で受け取り、走行距離情報の差分に基づき自車の移動距離を算出する移動距離算出手段と、
自車の運動特性に基づき移動距離が異常であるか否かを判定する判定手段と、
移動距離が異常であると判定したとき、移動距離算出手段により算出された移動距離を補正する補正手段と、
を有する、自車位置算出装置。
【請求項2】
自車位置算出装置はさらに、車両内通信バスを含み、第2の生成手段により生成された走行距離情報は、車両内通信バスを介して移動距離算出手段に送信される、請求項1に記載の自車位置算出装置。
【請求項3】
判定手段は、前回の走行距離情報と今回の走行距離情報の移動距離の差分が一定のしきい値を越えるとき、移動距離が異常であると判定する、請求項1または2に記載の自車位置算出装置。
【請求項4】
判定手段は、自車の走行速度が一定のしきい値を超えるとき、移動距離が異常であると判定する、請求項1または2に記載の自車位置算出装置。
【請求項5】
判定手段は、自車の加速度が一定のしきい値を超えるとき、移動距離が異常であると判定する、請求項1または2に記載の自車位置算出装置。
【請求項6】
補正手段は、第2の生成手段から得られた今回の走行距離情報を前回の走行距離情報に置換する、請求項1ないし5いずれか1つに記載の自車位置算出装置。
【請求項7】
補正手段は、今回の移動距離を、前回の算出された移動距離に置換する、請求項1ないし5いずれか1つに記載の自車位置算出装置。
【請求項8】
補正手段は、今回の移動距離を、GPS測位から得られた移動距離に置換する、請求項1ないし5いずれか1つに記載の自車位置算出装置。
【請求項9】
補正手段は、判定手段により自車位置が異常であると判定されたとき、予め設定された期間中、移動距離の補正を継続する、請求項1ないし8いずれか1つに記載の自車位置算出装置。
【請求項10】
自車位置算出装置はさらに、算出された移動距離と自車の方位情報に基づき自車位置を算出する自車位置算出手段を有する、請求項1ないし9いずれか1つに記載の自車位置算出装置。
【請求項11】
車両が一定距離を移動するたびに生成されるパルス信号に基づき自車位置を算出可能な自車位置算出装置であって、
一定期間内にパルス信号を受け取り、その間のパルス数をカウントすることで積算されたパルス数に応じた走行距離情報を一定の周期で送信する走行距離情報生成手段と、
走行距離情報生成手段から出力された走行距離情報に基づき自車の相対的な移動距離を算出する移動距離算出手段と、
を有する、自車位置算出装置。
【請求項12】
走行距離情報生成手段は、車両内通信バスを介して走行距離情報を移動距離算出手段に送信する、請求項11に記載の自車位置算出装置。
【請求項13】
走行距離情報生成手段は、車両が一定距離を移動するたびにパスル信号を出力する距離センサを含む、請求項11または12に記載の自車位置算出装置。
【請求項14】
車両の走行距離に応じて生成されるパスル信号に基づき自車位置を算出する自車位置算出方法であって、
パルス信号を積算し、積算されたパルス数に応じた走行距離情報を生成する第1のステップと、
走行距離情報を一定の周期で送信する第2のステップと、
走行距離情報を受信し、走行距離情報の差分に基づき自車の移動距離を算出する第3のステップと、
自車の運動特性から移動距離が異常であるか否かを判定する第4のステップと、
異常であると判定されたとき、第3のステップで算出された移動距離を補正する第5のステップと、
補正された移動距離に基づき自車位置を算出する第6のステップと、
を有する、自車位置算出方法。
【請求項15】
第4のステップは、自車の走行速度が一定のしきい値を超えたとき、または自車の加速度の差分が一定のしきい値を超えたとき、移動距離が異常であると判定する、請求項14に記載の自車位置算出方法。
【請求項16】
第5のステップは、今回受け取った走行距離情報を、前回受け取った走行距離情報に置換する、請求項14に記載の自車位置算出方法。
【請求項17】
第5のステップは、今回の移動距離を、前回の算出された移動距離に置換する、請求項14に記載の自車位置算出方法。
【請求項18】
第5のステップは、今回の移動距離を、GPS測位から得られた移動距離に置換する、請求項14に記載の自車位置算出装置。
【図1】


【図2】
【図3】

【図4】

【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2007−33278(P2007−33278A)
【公開日】平成19年2月8日(2007.2.8)
【国際特許分類】
【出願番号】特願2005−218176(P2005−218176)
【出願日】平成17年7月28日(2005.7.28)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成19年2月8日(2007.2.8)
【国際特許分類】
【出願日】平成17年7月28日(2005.7.28)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]