
Fターム[5H209GG01]の内容
Fターム[5H209GG01]に分類される特許
1 - 20 / 49
工作機械
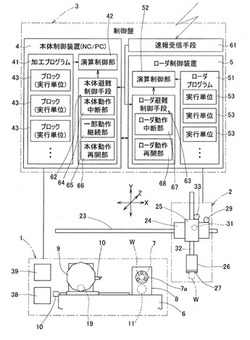
【課題】 地震による損傷を防止すると共に、緊急地震速報が誤報であった場合にも、作業者よる加工再開の操作を必要とせずに加工が再開できて、加工精度が低下することを抑えることができ、かつワークに加工中断の痕跡を残すことがないようにする。
【解決手段】 本体制御装置4に、速報受信手段61による緊急地震速報の受信に応答して、工作機械本体1に一連の避難動作を行わせる本体避難制御手段62を設ける。この手段62は、現在実行中の実行単位43の終了後に加工プログラム41の実行を中断し、工作機械本体1に退避動作を行わせる本体動作中断部62を有する。また、前記中断の後、定められた経過時間後に、工作機械本体1を退避動作前の状態に戻すと共に、加工プログラム41の実行を再開させる本体動作再開部66を有する。
(もっと読む)
ポンプ制御盤

【課題】ポンプの起動・停止を行うことができる遠方操作盤が接続されている場合であっても、十分に安全を確保すること。
【解決手段】給水ポンプユニットP1,P2の運転・停止制御を行う第1制御部21を有する主制御盤20と、給水ポンプユニットP1,P2の運転・停止制御を行う第2制御部51を有する遠方操作盤50と、主制御盤20に設けられ遠方操作盤50との通信を行う第1通信ポート27及びインバータQ1,Q2との通信を行う第2通信ポート28と、遠方操作盤50に設けられ主制御盤20との通信を行う第1通信ポート57と、主制御盤20に設けられ、手動・停止・自動のいずれかの運転モードを選択させると共に、自動運転モードが選択された場合にのみ、遠方操作盤50における給水ポンプユニットP1,P2の運転・停止制御を有効にする運転選択スイッチ部30とを備えている。
(もっと読む)
電子制御装置
【課題】負荷の駆動を制御すると共に、その制御が正常に行われない異常状態であるか否かを判定して、異常状態と判定した場合には負荷を強制的に所定の待避状態にさせるよう構成された電子制御装置において、異常状態との判定によって負荷を待避状態にさせた後は、その待避状態を確実に保持できるようにすることを目的とする。
【解決手段】第1判定回路10及び第2判定回路20のいずれも、マイコン2からの判定用データが不合格データならばそれぞれ閉塞信号をHレベルにセットする。これによりモータドライバ3への第3閉塞信号はHレベルにセットされ、モータ5は強制的に停止される。その後、マイコン2の異常によって意図しないリセットコマンドが受信されると、第1閉塞信号はLレベルにクリアされてしまうが、第2閉塞信号はHレベルのまま保持され、よって第3閉塞信号もHレベルのまま保持される。
(もっと読む)
移動体駆動制御システムの異常監視装置
【課題】コンピュータ(CPU)で制御するサーボ系において、コンピュータの異常検出遅れ時間の短縮、異常検出からサーボモータの減速停止動作開始までの空走時間の短縮及び異常停止時のショック軽減を実現できるようにする。
【解決手段】移動体駆動制御システムは、サーボモータ11を駆動するサーボアンプ12と、該サーボアンプ12に速度指令を出力するサーボ指令部13と、サーボ指令部13を制御するCPU(コンピュータ)14とから構成されている。サーボ指令部13内には、CPU14の動作が異常になっていないか否かを監視する異常監視手段22と、この異常監視手段22によりCPU14の異常が検出されたときに所定の減速停止プロファイルに従ってサーボモータ11を減速して停止させるようにサーボアンプ12に出力する速度指令を変化させる異常時減速停止手段23としての機能が組み込まれている。
(もっと読む)
プラント監視制御システム、およびリモート監視制御装置
【課題】リモート監視制御装置に故障が発生しても容易に代替品と交換が可能かつ、信頼性を維持できるプラント監視制御システムおよびリモート監視制御装置を提供する。
【解決手段】リモート監視制御装置2は、リモート監視制御装置2と、その監視制御の種類およびシーケンスとに対する識別情報を固有の物理的形状で指定する操作キーKが錠前22Kに装着されると、スイッチ222の接続先を、COMI/F21から錠前22Kのプログラム選択部221へ切替え、錠前22Kは操作キーKの形状から前記指定された指定されるシーケンスを実施するプログラムの選定情報をプログラム選択部221からPLC24に出力し、PLC24は指定された前記監視制御の種類とシーケンスとを実施する。
(もっと読む)
プラント制御装置
【課題】多重系プラントコントローラ構成で、制御ソフトを一括コピーして、他のプラントコントローラが用いる制御ソフトを生成しても、温度センサの検出温度の精度が高いプラント制御装置を提供する。
【解決手段】温度センサ12a、12bと、各温度センサの検出温度の誤差を補正する補正データ22a、22bを格納する補正データ格納部15a、15bと、各温度センサの検出温度を取り込んで各補正データで補正して制御を行う制御ソフト25a、25bとを備えてなる多重化したプラントコントローラであって、プラントコントローラ11aが用いる制御ソフト25aをプラントコントローラ11bにコピーして用いるプラント制御装置において、プラントコントローラ11aに対応させて設けられた温度センサ12aの補正データ22aは、プラントコントローラ11bに対応させて設けられた温度センサ12bの補正データ22bに置き換えて用いられる。
(もっと読む)
電動機駆動システム
【課題】 制御装置の減速時間と安全機能装置の出力とを同期させることによって、安全かつ確実に電動機を減速・停止させること。
【解決手段】 電動機を可変速運転する制御装置と、電動機を安全に停止させるために制御装置へ停止指令を出力する安全機能装置とを有する電動機駆動システムにおいて、安全機能装置に、電動機を停止させる前に電動機を減速するための減速指令を制御装置へ出力する手段と、減速指令の出力から計測を開始する計時手段と、計時手段が予め定めた設定時間に達したときに制御装置へ停止指令を出力する手段とを設け、制御装置は、減速指令を入力したときに、設定時間よりも短い減速時間で電動機を減速させるように構成する。
(もっと読む)
ジンバル駆動制御装置
【課題】従来のジンバル駆動制御装置は、WDTにより駆動制御手段30の異常を検出した際にジンバルを停止させるように構成しているので、ジンバルを停止させるまでの間に遅れが生じることがあり、ジンバルが異常回転される可能性がある。
【解決手段】本発明によるジンバル駆動制御装置は、ジャイロ51からの信号とレゾルバ53からの信号とに基づいてジンバルの駆動速度50a,50bを検出し、駆動速度50a,50bが規定速度を超えた際にジンバルを停止させる構成である。
(もっと読む)
プログラマブルコントローラ
【課題】システムにかかる負荷を軽減することが可能なセキュリティ機能を搭載したプログラマブルコントローラを提供すること。
【解決手段】ユーザを認証するためのユーザ管理情報1とプログラマブルコントローラ内のファイルへのアクセスを制御するためのアクセス制御情報2とを分離し、ユーザの認証とファイルへのアクセスの制御を2段階に分けることで、システムにかかる負荷を軽減する。さらに、アクセス制御情報2をファイル毎に設定することで、アクセスを制御したいファイルの追加に伴う、情報量の増大を抑制できるため、システムにかかる負荷をより軽減することができる。
(もっと読む)
自動化設備を制御するための安全コントローラおよびその制御方法
【課題】制御される設備の確認されたプロセス状態または安全コントローラのシステム状態を表す情報の伝達をよりフレキシブルに、それによって外部の状況に合わせて表示する情報を調整できるようにする。
【解決手段】安全コントローラ12と対話する人、具体的には前記ディスプレイユニット72を読み取る人に関連するアクセス認証を検出するように設計されており、前記検出されたアクセス認証を表すアクセス認証信号84を提供する前記検出ユニット82用のインターフェース80と、前記作動状態信号68ならびに前記特殊作動モード信号78および/または前記アクセス認証信号84が供給され、前記確認された作動状態を表す診断レポートを判断するために、前記確認された作動状態ならびに前記選択された特殊作動モードおよび/または前記検出されたアクセス認証に基づいて、前記診断レポートを表すとともに、前記診断レポートを表示するために前記ディスプレイユニット72に供給される診断信号88を生成する診断選択ユニット86と、を有する安全コントローラ。
(もっと読む)
安全ステップの判定方法および安全マネージャ
サブスクライバを含むオートメーションネットワークにおける安全ステップを判定するために、オートメーションネットワークにおけるサブスクライバ間のデータおよび処理に固有のリンクは、自動的に判定される。オートメーションネットワークにおける安全ステップは、その後、オートメーションネットワークにおけるサブスクライバの判定されたデータおよび処理に固有のリンクと、判定されたサブスクライバに固有の安全パラメータとを関連付けるアルゴリズムを用いて評価される。 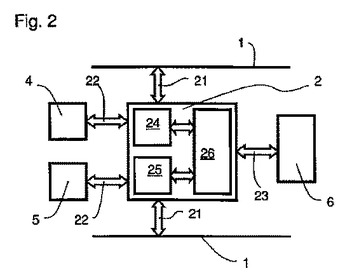 (もっと読む)
(もっと読む)
監視制御システム
【課題】コストをかけることなく、監視・制御の継続性を確保することを可能とする。
【解決手段】監視装置10は、オペレータによって操作される。コントロールセンタ50は、対象機械100を制御する。監視装置10及びコントロールセンタ50は、ネットワークを介して互いに接続される。監視装置10は、オペレータの操作に応じて対象機械100を制御するための制御指令を出力する。コントロールセンタ50は、監視装置10によって出力された対象機械100を制御するための制御指令に応じて当該対象機械100を制御する。
(もっと読む)
制御装置、生産システム、制御方法、及び通信方法
【課題】制御装置がPLCから信号を受信するまでの待ち時間を有効活用することによりタイムロスを削減しつつ、従来と同等なPLCの生産システムを統括するための機能を併せて保障すること。
【解決手段】複数の制御装置301〜304と、前記各制御装置301〜304と通信するPLC101と、から構成される生産システム300において、前記制御装置301は、他の前記制御装置302が出力する第1の信号と前記第1の信号に対応して前記PLC101が出力する第2の信号とを受信する信号受信部203と、前記第1の信号に基づいて被制御装置104の動作を開始する被制御装置起動部204と、前記第1の信号と前記第2の信号とを照合し、照合した結果に基づいて前記被制御装置104の動作を継続又は停止する信号照合部205と、を有する。
(もっと読む)
監視システム
本発明は、入力信号に応じて制御信号を生成するための出力モジュール(201)と、出力モジュール(201)用の入力信号を生成するための監視モジュール(203)と、制御信号に応じて出力信号を出力するための出力装置(205)と、出力信号を出力しないようにするためのフィードスルー装置(207)とを有する監視システムに関する。本発明によれば、監視モジュール(203)は、制御信号と入力信号に基づいて予想される制御信号との間にずれがあるとき、出力信号を出力しないようにフィードスルー装置(207)に命令するように設計される。  (もっと読む)
(もっと読む)
パルス入力処理装置
【課題】 突変的な周波数変動のみならず、定期的に発生する周波数変動にも常時更新し続けることができるパルス入力処理装置を実現する。
【解決手段】 所定の演算更新周期で入力パルスのサンプリング時間及びカウント値を取得し、周波数演算して出力する周波数演算手段を有するパルス入力処理装置において、
前記サンプリング時間を細分化したオーバーサンプリング時間の時間値を、前記オーバーサンプリング時間毎に積算する時間値積算手段と、
前記オーバーサンプリング時間の入力パルスのカウント値を、前記オーバーサンプリング時間毎に積算するカウント値積算手段と、
前記時間値積算手段の積算値が所定の精度補償時間に達した時に、前記時間値積算手段の積算値及び前記カウント値積算手段の積算値を前記周波数演算手段に渡す第1スイッチ手段と、
を備える。
(もっと読む)
モデル予測制御装置
【課題】モデル予測制御の実行中になんらかの制御計算上の不具合が発生した場合に、安全のため上位のモデル予測制御系を切り離し、滑らかに下位制御系のみの制御へ移行して制御を継続することができるモデル予測制御装置を提供する。
【解決手段】目標値生成器10、モデル予測制御器(MPC)20、切替器100、下位制御器(LC)30、および、制御対象(P)40から構成される。通常では、切替信号FLG_LCはフラグが0の状態に置かれてMPC20による最適化処理が実行される。しかし、MPC20内の最適化処理が重くなり、たとえば実行時間が制御周期内に収まらない事態が発生したと判断された場合には、MPC20は切替信号FLG_LCのフラグを1に切り替える。このフラグ“1”は切替器100に伝えられ、切替器100はMPC20利用の状態から下位制御系のみの状態へ滑らかに移行する。
(もっと読む)
制御システム及び制御方法
【課題】遠隔操作型、または自律動作型のロボット等の動作を制御するための制御システムであって、ロボット等及び制御システムの異常を確実に検出することができ、異常が生じた場合には、ロボット等が高速で動作しているときであっても慣性によって動作し続けることを防止して周囲に危険が及ぶことを防止し、また、ロボット等の重量及び容積を増大させることがなくロボット等の動作性能を劣化させることがない制御システムを提供する。
【解決手段】電源制御を行い一定周期でアライブメッセージを送信する電源制御コンピュータ1と、サーボドライバ5への速度指令を出力し一定周期でアライブメッセージを送信する駆動制御コンピュータ2と、これらコンピュータ1,2を接続する通信回線3とを備え、各コンピュータ1,2のいずれかがアライブメッセージを受信しなくなった場合には、サーボドライバ5へ停止指令を出力し、その後、駆動系への電源供給を遮断する。
(もっと読む)
安全確保装置
【課題】冗長化された複数の設定部を有する安全確保装置における設定作業の効率化を図る。
【解決手段】動作モードと設定モードとを切り替えるモード切替部26によって、設定モードを選択し、設定部の組の内の特定の設定部としての第1の設定部23−1に対して設定を行うことにより、その設定内容、第1,第2の逆起電力入力部11,12および接点入力部13の入力に基づいて、安全信号と同様の補助信号を出力するようにしており、これによって、冗長化されている二つの第1,第2の設定部23−1,23−2に対して同じ設定を行うことなく、第1の設定部23−1のみの設定を行なえばよく、また、補助信号を用いて、設定内容が適切であるか否かを確認して設定を調整することができる
(もっと読む)
監視装置
【課題】本発明によれば、正しい中央側パソコンからの制御指令に基づいた制御を実行する監視装置を提供する。
【解決手段】ネットワーク200と通信するコネクタと、監視制御対象304の状態を表す接点信号を入力する入力端子と、監視制御対象304へ制御信号を出力するための出力端子と、メモリと、CPUとからなり、監視制御対象304の設置される現場機装置側に設置され、遠隔制御指令を発信する中央側パソコン100と通信し、中央側パソコン100から送信される遠隔制御指令を受信したときに、遠隔制御指令のデータの中に含まれる中央側パソコン100のID番号を基に、アドレスを取得し、取得したアドレスに対して通信を行い、通信する相手の状態データを受け取り、受け取った状態データが遠隔制御指令送信中であるかを判定し、判定結果が正しければ、受信した遠隔制御指令に従って実行する機能を有する監視装置300。
(もっと読む)
制御装置及び制御プログラム切り替え方法
【課題】制御プログラムが変更された場合に、シミュレーションプログラムを用いることなく、変更後制御プログラムを組み込んだ制御装置が機器を正常に動作させるか否かを利用者に確認させる。
【解決手段】保守装置2からテスト実行が要求された場合に、保守装置2から受信した変更後制御プログラムを機器3への出力を禁止しつつ実行するテスト実行手段11bと、保守装置2から制御プログラムの切り替えが要求された場合に、変更後制御プログラムを制御プログラムとして実行するために、変更後制御プログラムと制御プログラムとを切り替える制御プログラム切り替え手段11cとを備える。
(もっと読む)
1 - 20 / 49
[ Back to top ]