
Fターム[5H301AA02]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の可動空間、領域、経路 (2,962) | 陸上 (1,642) | 屋内 (514)
Fターム[5H301AA02]に分類される特許
201 - 220 / 514
搬送システム及び搬送車
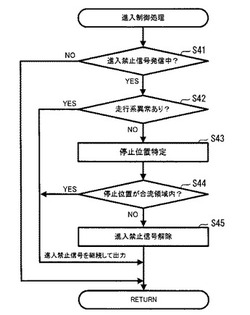
【課題】例えば半導体装置製造用の各種基板等が収容された容器等の被搬送物を、合流箇所を含む軌道上で搬送する搬送システムにおいて、搬送車同士の衝突を防止しつつ、搬送車を効率良く稼働する。
【解決手段】搬送システム(100)は、軌道(1)と、複数の搬送車(3)と、軌道上における合流箇所を含む所定範囲内へ、複数の搬送車のうち一の搬送車が軌道の一部を介して進入した場合に、所定範囲内へ、複数の搬送車のうち他の搬送車が軌道の他部を介して進入することを禁止する旨の進入禁止信号を出力する進入制御手段(7,9)とを備える。進入制御手段は、進入禁止信号が出力されている際に前記一の搬送車で停止を伴う故障が発生した場合に、一の搬送車の停止位置を基準として他の搬送車が一の搬送車に衝突するか否かを判定し、他の搬送車が衝突しないと判定されると、進入禁止信号を解除する。
(もっと読む)
移動ロボットおよび移動ロボット制御システム

【課題】高価なセンサを用いることなく、移動ロボットの周囲に存在する障害物をより効率的に検知することができる移動ロボットおよび移動ロボット制御システムを提供することである。
【解決手段】移動ロボット100は、移動ロボットを移動させる移動機構と、複数の第1の距離取得手段106とを含む。複数の第1の距離取得手段106の各々は、複数の測定方向に位置する障害物までの測定距離を取得する。複数の第1の距離取得手段106は、所定時間毎に同期して測定方向を切り替える。移動ロボットは、第1の距離取得手段の間に第1の距離取得手段の測定可能レンジよりも短い第2の距離取得手段126を含む。
(もっと読む)
自律移動ロボットの仮想壁システム
【課題】
本発明は自律移動ロボットに関わり、特に部屋の中を自走して掃除を行う自走式掃除機の進入禁止領域への移動を制限する仮想壁システムに関するものである。
【解決手段】
信号を送信する第1の送信手段と、第1の送信手段からの信号を受信する第1の受信手段と、第1の受信手段の信号の変化を検出する状態検出手段と、自律移動ロボットに信号を送信する第2の送信手段と、状態検出手段が検出した信号に基づいて送信手段を制御する第1の制御手段とを備えた仮想壁システムと、第2の送信手段からの信号を受信する第2の受信手段と、自律移動ロボットを移動させる移動手段と、第2の受信手段が受信した信号に基づいて移動ロボットの移動量や方向を演算する演算手段と、演算手段により演算された移動ロボットの移動量や方向に基づき移動手段を制御する制御手段とを備えた自立移動ロボットを有している。
(もっと読む)
無人搬送車
【課題】搬送物の移載時に各移載先の載置高さが異なる場合でも搬送物を安定した状態で移載することができる無人搬送車を提供する。
【解決手段】搬送物2を載置し移載先5に受け渡す移載部4を備え、誘導路MTに沿って走行面F上を運行制御される無人搬送車1であって、無人搬送車1は、移載先5における搬送物移載高さに応じて、移載部4における搬送物載置高さを調整する載置高さ調整部14を備える。
(もっと読む)
自律移動装置
【課題】自律移動装置において、簡単な構成により、オーバハング形状の障害物に対しても確実に回避動作をし、ハンチング現象を起こさず、移動している障害物に対してもスムーズな回避動作をして効率的に移動することを可能とする。
【解決手段】本装置1は、走行面Rに平行な面内の情報より障害物位置情報を取得する第1環境情報取得手段21と、走行面Rとは非平行な面内の情報より障害物位置情報を取得する第2環境情報取得手段22とを備え、第2環境情報取得手段22によって取得された障害物位置情報のうち、第1環境情報取得手段21によって取得された障害物位置情報の周囲一定範囲内にある情報を除く情報が記憶される(図中、点b1の位置は一定時間記憶され、点b2の位置は記憶されない)。経路生成手段は、第1環境情報取得手段21によって取得される障害物位置情報と、記憶手段4に記憶された障害物位置情報とに基づいて走行経路を生成する。
(もっと読む)
自律走行車の走行システム
【課題】安定した信頼性の高い走行制御が確保できると共に、作業環境の清浄度が良好に維持できる自律走行車の走行システムを提供する。
【解決手段】自律走行車31の車体に取り付けられてテープ25a〜25eが付された天井部22を撮影する撮影部38と、床面21に埋め込まれた複数の磁気ピン30による磁気マーカライン26A、26B〜29A、29Bを検出する磁気センサ36、37とを備え、撮影部38によって撮影された画像データに基づいて床面21上を走行せしめると共に、磁気センサ36、37の磁気マーカライン26A、26B〜29A、29B検出に基づいて制動停止せしめる。塵埃等による作業環境の清浄度を悪化することなく、信頼性の高い走行制御が確保できる。また、磁気センサ36、37により高精度で磁気マーカライン26A、26B〜29A、29Bが検知でき高精度で制動停止ができる。
(もっと読む)
搬送装置
【課題】例えば半導体装置製造用の基板等が収容された被搬送物を搬送する搬送装置において、搬送効率の低下を回避しつつカーブを安定して走行する。
【解決手段】搬送装置(20)は、搬送手段(3)と、搬送手段が走行する予定経路を設定する旨を示す搬送指令を受信可能な受信手段と、予定経路を走行する際の目標速度を示す速度指令を特定する特定手段(4)と、新たに特定される新規の速度指令により示される新規の目標速度に向けて速度変更を行いつつ受信手段により新たに受信される新規の搬送指令により示される新規の予定経路を走行するものと仮定して、搬送手段の現在速度及び特定された今回の速度指令により示された今回の目標速度に基づいて、搬送手段が新規の予定経路に含まれる所定箇所に進入するまでに速度変更が完了するか否かを判定する判定手段(6)とを備える。
(もっと読む)
自律移動体制御システム、自律移動体制御方法、自律移動体制御プログラム、および記録媒体
【課題】目標物の位置まで自律移動体を移動させる際に必要なスペースの省スペース化とともに、移動時間の短縮を図ることができる自律移動体制御システム、自律移動体制御方法、自律移動体制御プログラム、および記録媒体を提供する。
【解決手段】レーザレンジセンサ110は、所定角度範囲内に光を照射し、照射した光の反射光から警備ロボット周辺に存在する充電装置200を含む物体の位置を示す複数の位置情報を検出し、レーザレンジセンサにより検出された複数の位置情報から、レーザレンジセンサにより照射された光の反射光の反射率が所定反射率よりも低い領域を特定し、当該領域の距離とNDフィルタ210の長さとが略同一であることを条件に、当該領域をNDフィルタと特定し、特定されたNDフィルタに基づいて、警備ロボットを充電装置200まで移動させる。
(もっと読む)
搬送設備
【課題】本発明は、簡単な構成で、自走台車のエンジン位置をトロリ装置の車体のエンジン取付位置に自動同期させることができる搬送設備を提供することを目的とする。
【解決手段】トロリ装置3に設けた、進み検出用反射板58と遅れ検出用反射板60を、自走台車15に設けた光電スイッチ31,33により検出し、進み検出用反射板58のみが検出されると自走台車15を減速し、遅れ検出用反射板60のみが検出されると、自走台車15を加速する。この構成により、自走台車15をトロリ装置3に同期することができ、この際にトロリ装置3の走行速度を計測し、自走台車15に通信する必要がなく、また自走台車15からトロリ装置3に何ら通信する必要はなく、設備を簡略化することができる。
(もっと読む)
自己位置認識方法及び自己位置認識装置
【課題】ランドマーク、磁気マーカ等の設置を行なわなくても、自己位置を認識できる方法及び装置を提供する。
【解決手段】移動体が自己の位置を認識する方法であって、移動体が移動する環境において基準磁気を測定し、基準磁気と基準磁気が測定された位置とが対応付けられた磁気−位置情報を予め記憶するステップ(a)と、前記環境において移動体が備える磁気センサにより直流の実測磁気を測定するステップ(b)と、ステップ(a)で記憶された基準磁気と、ステップ(b)により測定された実測磁気と、を対比して実測磁気が測定された位置を特定するステップ(c)と、を備える。
(もっと読む)
走行車
【課題】手動操作モードでの調整、メインテナンス等の作業の安全性向上を図ることができる走行車を提供する。
【解決手段】手動操作モードと自動走行モードのいずれであるかを判定する走行モード切替・判定部32と、リモコンからの信号を受信するリモコン信号受信部5a〜5dと、走行車の走行速度を制御する走行方向・速度制御部33とを備え、前記走行方向・速度制御部33は、手動操作モードにおいて、走行車が前記リモコンからの信号を受け付けた方向に進む場合には、他の方向に進む場合よりも前記走行車の走行速度を減速するように制御する。
(もっと読む)
移動装置および、その位置認識方法
【課題】従来技術では、カメラと投光する平面との相対位置関係から傾きや距離を算出しているため、平面とカメラの絶対位置が変化すると平面の絶対的な傾きを算出することができない課題がある。
【解決手段】本発明は、移動装置が活動する領域の天井に設けられた認識用マークをカメラで撮像した画像から認識し、前記領域内の前期移動装置の位置を認識する自己位置認識方法において、前記移動装置が、重力方向に垂直な面を保つ屈折板を透過した天井に投光したパターンの形状と位置をカメラの撮像した画像から認識し、重力方向に対する移動装置の傾斜角を判断することにより、移動装置とマークの正確な相対位置認識を行うことを特徴とする移動装置の自己位置認識方法、および、自己位置認識移動装置を提供することを目的とする。
(もっと読む)
搬送システム
【課題】例えば半導体装置製造用の各種基板等が収容された容器などの被搬送物を、搬送する搬送システムにおいて、バーコードラベル等の識別マークを利用して制御を実行する際の実行位置や実行内容についての自由度を高める。
【解決手段】搬送システム(100)は、軌道(1)と、軌道に相互に間隔をおいて夫々付けられた複数の識別マークと、軌道に沿って走行して被搬送物を搬送すると共に、複数の識別マークのうち通過した識別マークを読み取る読取手段を有する搬送手段(3)と、軌道に沿った複数の識別マーク間に予め仮想的に夫々付けられた複数の仮想マークのうち、搬送手段が通過した仮想マークを、読み取られた識別マークに基づいて、特定する仮想マーク特定手段(10)と、特定された仮想マークに基づいて、搬送手段を制御する搬送制御手段(10)とを備える。
(もっと読む)
自律移動装置
【課題】領域の塗り潰しを行う自律移動装置において、走行領域の形状に柔軟に対応して自然な移動で効率的に走行領域を塗り潰し可能とする。
【解決手段】自律移動装置の経路生成手段は、走行領域2を規定する2つの境界縁3と走行領域2における4つの領域定義点P0〜P3による2つの線分4とで囲まれた閉領域20が指定されると、閉領域20を所定の掃引幅Wで走行して塗り潰すために、線分4に沿って、既定の仮目的地P0〜P3に加え追加の仮目的地a,b(総称してK)を設定し、各仮目的地Kを経由するように経路Rを生成する。閉領域20は、当該閉領域の境界に位置する複数の領域定義点P0等によって走行領域2に柔軟に設定でき、領域定義点P0等を結んで成る線分と、状況に応じて援用される境界縁3とで囲まれた領域として定義される。自律移動装置は、仮目的地Kの位置を認識しつつ安定に塗り潰し移動できる。
(もっと読む)
無人搬送車を用いた搬送装置
【課題】無人搬送車による通路の遮断時間を短縮することで、作業全般の流れを良くするとともに、搬送路の変更も行なうことができる無人搬送車を用いた搬送装置を提供する。
【解決手段】2つのステーション2A、2Bを接続し、通路Rとの交差部において往路3aと復路3bとを有する誘導ルート3と、これに沿って走行する複数の無人搬送車4と、2つのステーション2A、2Bの一方で無人搬送車4に連結され、他方で解除されることで2つのステーション2A、2B間を搬送されるパレット5と、無人搬送車4の走行を制御する地上制御機6と、往路3a及び復路3bにおける通路Rの進入口の無人搬送車4の有無を検知する進入口検知手段とを備え、無人搬送車4が進入口を通過する際、他方の進入口に無人搬送車4が無い場合には停止して他方の進入口に無人搬送車4が到着すると同時に発進する。
(もっと読む)
自律移動ロボットおよびそのエレベータ乗降方法
【課題】周囲の環境などに影響されずに、エレベータ籠内の状態を感知し、人との共用を排他的に制限し、人のエレベータ利用時の安全性向上を図ることを目的とする。
【解決手段】上記目的を達成するために、本発明は、エレベータ籠に乗降して複数の階にわたる領域を自律的に移動する自律移動ロボットとエレベータ装置によるエレベータ乗降システムであり、前記自律移動ロボットは自身の周囲の環境を検出する環境センシング手段と、後述の乗降システム制御部と所定の信号の送受信を行なう無線通信手段を備え、前記エレベータ装置はエレベータ籠とエレベータへの搭乗するためにエレベータ籠を呼び出すエレベータ籠呼出部とエレベータ搭乗の出入口となるエレベータ扉とエレベータ籠の重量を検出するエレベータ籠重量検出部と、エレベータ籠を上下移動させるためのエレベータ籠巻上げ部とを備えることを特徴とする。
(もっと読む)
自走式機器およびそのプログラム
【課題】機器本体と障害物との相対位置を確保して自動的に走行する自走式機器を提供すること。
【解決手段】機器本体100周辺の障害物108を検知するセンサ部103と、障害物108に設置された無線タグ107から送信された無線タグ情報を読み取る無線タグ読取部105と、センサ部103及び無線タグ読取部105からの出力信号に基づいて移動手段102を駆動し機器本体100の移動を制御するコントロール部101と、無線タグ107へ情報を書き込む無線タグ書込部106とを備え、コントロール部101は、無線タグ017からの無線信号を受信した時、障害物108までの離間距離情報および機器本体の位置情報を、無線タグ書込部106を介して無線タグ107に書き込むように制御する。
(もっと読む)
自走式掃除システム
【課題】
自走式掃除システムであって、自走式掃除機が充電台へ確実に自動帰還するシステムを提供する。
【解決手段】
本発明の自走式掃除システムは、自走式掃除機に障害物等との距離を測定する距離センサと、充電台の給電端子と接続することで二次電池を充電することが可能となる充電端子とを具備しており、前記距離センサは前記自走式掃除機の前方に設置した前方センサとし、前記充電台は前面に前記距離センサにて検出可能なマーカ形状と、前記給電端子とを具備しており、前記前方センサにて前記マーカ形状を検出している状態において前記自走式掃除機と前記充電台が接触したとき、前記充電端子と前記給電端子が接続するようにした。
(もっと読む)
無人搬送車の横行姿勢制御装置及び横行姿勢制御方法
【課題】装置を複雑化することなく、また製造コストを安価に抑えることができる無人搬送車の横行姿勢制御装置及び横行姿勢制御方法を提供する。
【解決手段】車両の前側に設けられた駆動ユニットと後側に設けられた駆動ユニットとが異なる軌道を移動する横行モードを有する無人搬送車の横行姿勢制御装置であって、車両が正しい姿勢であるときは前側の駆動ユニットと後側の駆動ユニットとが同時に通過するように軌道に設けられたチェックポイントを、前側の駆動ユニットと後側の駆動ユニットとが通過する時間差に基づいて車両の横行状態を推定する横行状態推定手段(S2)を有する。
(もっと読む)
移動体の制御システム、制御装置、及び移動体
【課題】移動経路の変更の自由度を確保しつつ、目的地まで移動体を自律的に移動させること。
【解決手段】複数のRFIDタグ50の配列によって形成される経路上を移動するロボット200と、ロボット200の経路上の移動方向又は移動量を制御するコントローラ100と、を備え、ロボット200は、経路上の移動時に複数のRFIDタグ50夫々から取得するRFIDタグ50同士を識別させる識別値をコントローラ100に送信し、コントローラ100は、ロボット200からの識別値の受信に応じて、識別値に対して予め設定されたロボット200を目的地まで移動させるための走行データをロボット200に送信する。移動経路の変更に応じて走行データの内容を変更することで、移動経路の変更に対応しつつ目的地までロボット200を自律的に移動させることができる。
(もっと読む)
201 - 220 / 514
[ Back to top ]