
Fターム[5H301AA05]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の可動空間、領域、経路 (2,962) | 水中 (25)
Fターム[5H301AA05]に分類される特許
1 - 20 / 25
潜水ビークル
走行ロボット
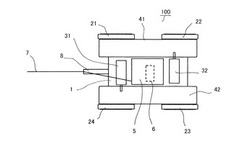
【課題】巻取装置を使用して急傾斜の階段でも安定した昇降が可能であり、且つ階段の踊り場のような狭い場所でも旋回が可能な走行ロボットを提供する。
【解決手段】階段200を上昇又は下降するときに、ワイヤ7若しくはケーブル70の一端を階段200の上方部に固定し、車体1が階段200を降下するときはワイヤ7若しくはケーブル70を送り出し、車体1が階段200を上昇するときはワイヤ7若しくはケーブル70を巻取るように巻取装置5を制御し、且つ、角度検出器9が検出した車体1の角度に基づいて巻取りの停止及び巻取りの開始を制御するようにした。
(もっと読む)
移動機械の移動方法

【課題】移動機械および移動機械周囲の状況を常に把握しつつ当該移動機械を移動すること。
【解決手段】複数の移動機械1A,1Bを用い、全ての前記移動機械1A,1Bにおいて、任意の移動機械1B(1A)により他の1つの移動機械1A(1B)を包含する空間情報を取得し、当該空間情報に基づいて前記他の1つの移動機械1A(1B)を移動させる。これにより、移動機械1A,1Bおよび移動機械1A,1B周囲の状況を常に把握しつつ当該移動機械1A,1Bを移動することができる。
(もっと読む)
遊泳型アクセス装置の姿勢安定化システム
【課題】バラストタンクのバラスト調整により遊泳型アクセス装置の上下移動だけでなく、姿勢を容易に制御することを可能にする。
【解決手段】完全に分離した複数のタンク22が集合してなるバラストタンク10と、 水中における遊泳型アクセス装置6の本体の傾斜の方向、傾斜量を計測する姿勢計測手段12と、バラストタンク10を構成するタンクのうち、任意のタンクへの注排水を実施する注排水手段と、姿勢計測手段による計測結果に基づいて、目標とする姿勢を保つのに必要な注排水を実施すべきバラストタンク10のタンク22の特定と必要とされる注排水量の演算を行い、その演算結果に従って前記注排水手段の動作を制御する制御手段14と、を設ける。
(もっと読む)
水中航走体の航走制御方法及び装置
【課題】 複数の水中航走体に装備する音響スキャンソナーの数を低減させる。
【解決手段】 音響スキャンソナー6を備え、位置表示装置2を搭載して航走できるようにした位置特定用水中航走体1と、位置表示装置2に対する相対位置を検出するための相対位置検出装置8を有する被誘導用水中航走体3を形成する。先ず、位置特定用水中航走体1を航走させて音響スキャンソナー6により海底4の特定位置4aを正確に検出させて、そこに位置表示装置2を設置させる。その後、被誘導用水中航走体3を航走させるときに、相対位置検出装置8により位置表示装置2との相対位置を検出させ、検出された位置表示装置2に向けて航走させることで、被誘導用水中航走体3を海底4の特定位置4aまで正確に到達させる。
(もっと読む)
外殻ロボット駆動システム
外殻ロボットは、ロボット本体と、外殻の周囲でロボットを移動させるための少なくとも一つの駆動モジュールと、搭載型動力源と、この搭載型動力源から動力の供給を受ける駆動モジュール用の動力サブシステムとを含む。複数の永久磁石要素が、駆動モジュールと関連付けられており、かつ、それぞれ、外殻に隣接したときの非短絡状態と、外殻に隣接していないときの短絡状態との間で切り換え可能となっている。 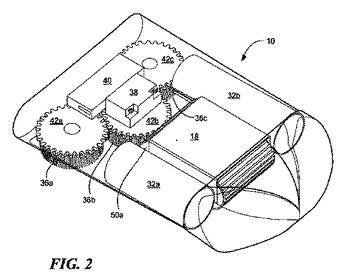 (もっと読む)
(もっと読む)
水中航走体の自律制御方法及び自律制御型水中航走体
【課題】 巡回経路上に障害物が存在していても、緊急回避動作回数を低減させる。
【解決手段】 ウェイポイント制御により巡回経路に沿って設けた各ウェイポイントを巡回させる自律制御型水中航走体が、1つのウェイポイントの場所から次に辿る順序のウェイポイントの場所を目標地点として移動する経路上で、水中航走体に装備した障害物検出ソナーにより経路上の障害物が検出されると、水中航走体を障害物のない方向へ移動させる緊急回避動作を行い、回避終了時の水中航走体の位置に、巡回経路の次の周回以降に経由させるための新たなウェイポイントを追加する。これにより、障害物が検出された周回の次の周回以降は、水中航走体を、追加されたウェイポイントを経由させることで、障害物に差し掛かることなく巡回させる。
(もっと読む)
姿勢検出装置、姿勢制御装置及び姿勢制御装置の制御方法
【課題】物体の水平度を検出するときに、光センサーを利用して姿勢を検出する方法では、夜間や水中のような暗い空間では十分な光を光センサーで受光できないため、姿勢を制御できないという問題があった。
【解決手段】対象物に、圧力値を検出する圧力センサー1A,1B,1C,1D,1Eを配設する。そして、検出した各配設位置における圧力値に基づいて対象物の姿勢の水平度を検出する水平度検出部11と、検出した各配設位置における圧力値に基づいて各配設位置間の高度差を算出する高度差算出部12と、算出した高度差に基づいて各配設位置における高度を変更して、対象物の姿勢の水平度を調整する水平度調整部13とを備える。
(もっと読む)
自律航走体運動モニタ用ディスプレイ装置
【課題】自律航走体の運動状態を直観的にすばやく正確に把握できる自律航走体運動モニタ用ディスプレイ装置を提供する。
【解決手段】直方体における隣接する3面を構成するように互いに直交して配置された第1平面ディスプレイ13、第2平面ディスプレイ14及び第3平面ディスプレイ15を有するマルチディスプレイ12と、時間的に変化する自律航走体の運動状態を、各ディスプレイに表示させる処理装置30とを備える。処理装置30は、各ディスプレイ13〜15の画面上に自律航走体の姿勢を示す情報を表示させる。処理装置30は、各ディスプレイ13〜15の画面上に自律航走体の位置、移動軌跡及びウェイポイントを示す情報を表示させてもよい。
(もっと読む)
自律移動ロボットの動作計画装置、方法、プログラム及び記録媒体並びに自律移動ロボットの動作制御装置及び方法
【課題】より安全で、より動作計画が破綻しづらい自律移動ロボットの動作計画を行う。
【解決手段】衝突判定部4が、互いに異なる複数の一時的な流れが生じた場合に、各状態にある上記自律移動ロボットが各行動に基づいて移動した場合に障害物に衝突するかどうかを判定する。衝突確率計算部6が、衝突すると判定された一時的な流れが生じる確率の総和である衝突確率を計算する。報酬決定部7が、衝突確率を考慮して報酬を決定する。動的計画部2が、報酬に基づいて動的計画を行う。
(もっと読む)
水中移動体の制御装置
【課題】水中移動体の位置および姿勢を精度良く制御する水中移動体の制御装置を提供することにある。
【解決手段】指令速度−指令推力変換手段24は、コントローラ13から入力した速度指令値を指令推力へと変換する。PID制御器27は、変換された指令推力と、3軸周りの角速度と3軸方向の加速度から、XYZ方向の推力制御量を算出する。スラスタ推力配分手段28は、XYZ方向の推力制御量を各スラスタが発生するスラスタ推力に変換する。スラスタ推力−モータ電圧変換手段29は、スラスタ推力を各スラスタの駆動モータの指令電圧へと変換し、スラスタ21,22,23に供給し、水中検査装置9を動作させる。初期キャリブレーション手段30は、指令値−指令推力変換手段24とスラスタ推力−モータ電圧変換手段29で用いる変換ゲインを予め同定し、同定した変換ゲインを各手段24,29に設定する。
(もっと読む)
清掃装置
【課題】簡単な操作で清掃装置を回収位置まで誘導することができるようにする。
【解決手段】水中において床面を走行しながら清掃する清掃装置本体1と、清掃装置本体1を遠隔操作する無線式の遠隔操作手段2とを備える清掃装置であって、遠隔操作手段2は、清掃装置本体1に設けられる少なくとも2つの受信部11,11と、各受信部11,11から離れた位置で、各受信部11,11に所定の超音波を送信する送信機12とを備え、清掃装置本体1は、送信機12から送信される超音波を各受信部11,11が受信したときに、各受信部11,11で受信された超音波の受信情報が異なる場合に、各受信情報が等しくなるように方向転換をするとともに、各受信部11,11の受信情報が等しくなったときに、その進路が送信機12に向くように構成される。
(もっと読む)
自律移動ロボットの動作計画装置、方法、プログラム及び記録媒体並びに自律移動ロボットの動作制御装置及び方法
【課題】より安全で、より動作計画が破綻しづらい自律移動ロボットの動作計画を行う。
【解決手段】安全性を高めるために想定される流速よりも速い流速の下で、第一状態遷移確率を計算する。第一状態遷移確率及び所定の第一報酬を用いて、マルコフ決定過程における動的計画法に基づき、状態価値関数Vπ(s)を求める。想定される流速の下で、第二状態遷移確率を計算する。第二報酬を、遷移先の状態についての第一指標に応じて定める。第二状態遷移確率及び第二報酬を用いて、マルコフ決定過程における動的計画法に基づき、行動価値関数Qπ(s,a)及び状態価値関数Vπ(s)を求める。行動価値関数Qπ(s,a)及び状態価値関数Vπ(s)を最大にする行動aを選択する。
(もっと読む)
船舶用自動操舵装置
【課題】船体の旋回時の横滑り特性及び/または潮流成分を考慮することによって、計画旋回の軌跡に乗せることができる船舶用自動操舵装置を提供する。
【解決手段】計画航路に従う旋回を行うための参照方位ψRを発生する参照方位発生部30と、参照方位ψRの時間微分である参照角速度rRから舵を切ることによって発生する旋回角速度に対応する参照斜航角βRを求める横滑り修正部32と、推定器で推定された潮流成分を、参照方位発生部で出力する参照方位に基づき座標変換を行って潮流の船体の横方向成分を求める座標変換部40と、該座標変換部40で座標変換された横方向成分から潮流に対抗する修正斜航角βdを求める潮流修正部42と、旋回時に参照方位、参照斜航角βR及び修正斜航角βdに基づき、修正されたフィードフォワード舵角を発生するフィードフォワード舵角発生部46とを備える。
(もっと読む)
水中航走体の発射回収システムおよびこの発射回収システムを備える船舶
【課題】小型船舶で安全に水中航走体の発射回収を行うことを目的とする。
【解決手段】水中を航走可能な水中航走体5と、水中航走体5を水中で発射または収容する発射回収カゴ3と、発射回収カゴ3に配置され、水中航走体5を誘導する誘導信号を発するピンガP1、P2,P3,P4とを備え、水中航走体5には、ピンガP1、P2,P3,P4から発せられた誘導信号を受信するハイドロフォン23と、ハイドロフォン23からの信号に基づいて発射回収カゴ3の位置および姿勢を計測する位置姿勢計測部と、位置姿勢計測部により計測された発射回収カゴ3の姿勢に合わせて水中航走体5の姿勢を制御する姿勢制御部とが設けられている水中航走体の発射回収システム10を提供する。
(もっと読む)
移動体制御システム及び移動体制御方法
【課題】高価な集中制御装置を用いることなく、各移動体の移動経路を最適化できるようにする。
【解決手段】移動体制御システム1を、移動体の自己位置を特定する自己位置特定手段2と、他の移動体の存在を検知する移動体検知手段3と、前記移動体の駆動中に得られる前記自己位置に関する情報及び前記他の移動体の存否に関する情報に基づいて、前記移動体同士が出合うことの多い場所を示す出合多発エリアを設定する出合多発エリア設定手段4と、前記出合多発エリア設定手段により設定される前記出合多発エリアに基づいて、前記移動体の行動計画を生成する行動計画生成手段5とを具備して構成する。
(もっと読む)
操船制御方法、プログラム及び装置、並びに自動操船制御システム
【課題】他船や航走体へ追従する操船や、自動操船以外の他の制御装置との間で連携を図った制御が実現できる操船制御方法、プログラム及び装置、並びに自動操船制御システムを得る。
【解決手段】海面又は海中を航行する他船2の位置に関する情報を取得するステップと、少なくとも他船2の位置に関する情報に基づき、自船1が他船2に追従するように、自船1を自動操船させる指令値を求めるステップと、該指令値の情報を自動操船装置20へ出力するステップとを有するものである。
(もっと読む)
水中航走体運動制御装置および水中航走体
【課題】水中航走体が巡航する高度を制御するときにその水中航走体本体の姿勢の変動を低減すること。
【解決手段】水底29のうちの第1点24から水中航走体本体2までの第1距離25と水底29のうちの第1点24と異なる第2点27から水中航走体本体2までの第2距離28とを測定する高度収集部15と、第1距離25と第2距離28とに基づいて、水中航走体本体2が進行する進行方向32の鉛直方向の成分を変更する舵5を制御する舵制御部16とを備えている。このような水中航走体運動制御装置は、水中航走体1が巡航する高度を制御するときに、水底29のうちの1点から距離を1つだけ測定して制御することに比較して、その水中航走体1の姿勢角と高度偏差の変動を低減することができる。
(もっと読む)
航走体の安定ロバスト制御装置、安定ロバスト制御システム、その方法およびプログラム
【課題】舵駆動源が故障し、かつ、正常に動作する舵駆動源が残っている場合においても、水中航走体の姿勢を安定に保つことのできる安定ロバスト制御装置を提供する。
【解決手段】安定ロバスト制御装置10は、舵駆動源7の故障を検知する故障検知手段11と、水中航走体1の姿勢に関する情報を検知するセンサ8にて検出した検出値と目標値との偏差を算出する偏差算出手段14と、水中航走体1の姿勢制御用パラメータとして、偏差に基づいて水中航走体1に付与する制御力および制御モーメントを算出する自動制御パラメータ算出手段15と、制御力および制御モーメントを、配分則に基づいて、各舵駆動源7に対して配分する配分量を算出すると共に、舵駆動源7の故障が検知された場合に、制御力および制御モーメントを、故障が検知された舵駆動源7を除く残りの舵駆動源7に対して再配分する配分量算出手段16とを備える。
(もっと読む)
水中ロボットの動作制御方法、装置、プログラム及びその記録媒体
【課題】事前に障害物の位置についての情報を得る必要がない劣駆動型自律ロボットの制御方法を提供する。
【解決手段】原点を目標到達位置とし障害物の位置を考慮せずに、価値関数を生成する。新たな障害物を検出するごとにその障害物の位置を求める。障害物にぶつからずに目標到達位置に到達するまでの、各時刻ステップにおける目標軌道位置を生成する。水中ロボットが各行動を取ったときに、上記目標軌道位置にどの程度近づくことができるのかを数値で評価し、その評価値により各行動に優先順位を付ける。水中ロボットが各行動を取ったときの障害物へのぶつかりやすさを計算する。優先順位の高い行動の順番で、その行動を取ったときの障害物へのぶつかりやすさが一定の閾値よりも小さいかどうかを判定し、小さいと判定された場合にはその行動を選択する処理を、行動が選択されるまで繰り返す。上記選択された行動に従うように、水中ロボットを制御する。
(もっと読む)
1 - 20 / 25
[ Back to top ]