
Fターム[5H301CC08]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 制御変量、指令内容 (1,997) | 移動体自体の姿勢 (149)
Fターム[5H301CC08]に分類される特許
1 - 20 / 149
潜水ビークル
倒立型移動体、その制御方法、及びプログラム
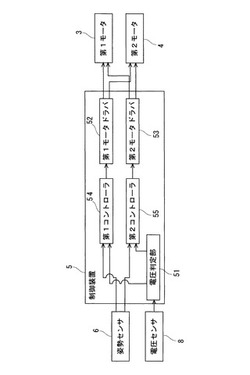
【課題】小型の抵抗に維持しつつ回生電力を効果的に消費すること。
【解決手段】倒立型移動体は、姿勢情報を検出する姿勢検出手段と、車輪を駆動する駆動手段と、姿勢検出手段により検出された姿勢情報に基づいた値に第1制御ゲインを乗算して駆動手段を駆動するための第1制御信号を生成する第1制御手段と、姿勢検出手段により検出された姿勢情報に基づいた値に第2制御ゲインを乗算して駆動手段を駆動するための第2制御信号を生成する第2制御手段と、回生電圧が所定閾値以上であるか否かを判定する判定手段と、を備える。駆動手段は、第1制御手段から出力される第1制御信号と、第2制御手段から出力される第2制御信号と、に基づいて前記車輪を駆動する。第1及び第2制御手段は、判定手段により回生電圧が所定閾値以上であると判定されたとき、第1及び第2制御ゲインのうち一方の符号を反転させて、第1及び第2制御ゲインを変更する。
(もっと読む)
無人車両

【課題】誘導ラインが途中で断線していたとしても、姿勢角を修正しながら安定して走行し続けることができる無人車両を提供する。
【解決手段】本発明に係る無人車両10は、車長方向に延びる車体中心線上に離間して設けられ、路面の画像データをそれぞれ出力する第1撮像手段11aおよび第2撮像手段11bと、画像データに基づいて姿勢角を算出する姿勢角算出部13と、姿勢角が目標値になるように車輪15の操舵角を制御する操舵制御部14とを備える。姿勢角算出部13は、第1撮像手段11aおよび第2撮像手段11bから出力された2つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出する第1算出動作、および第1撮像手段11aまたは第2撮像手段11bから出力された1つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出する第2算出動作を選択的に行う。
(もっと読む)
姿勢角度演算装置、姿勢角度演算方法、及びプログラム
【課題】低コストかつ高精度に姿勢角度を算出すること。
【解決手段】姿勢角度演算装置は、角速度を検出するジャイロセンサ及び加速度を検出する加速度センサを備え、ジャイロセンサにより検出された角速度と、加速度センサにより検出された加速度と、に基づいて姿勢角度を算出している。ジャイロセンサ及び加速度センサのうち少なくとも一方は、同一箇所及び同一方向を計測する、計測域の異なる複数のセンサで構成されている。姿勢角度演算装置は、計測域の異なる複数のセンサから夫々出力される信号に基づいて、姿勢角度を算出する姿勢角演算手段と、を備えている。
(もっと読む)
走行ロボット
【課題】巻取装置を使用して急傾斜の階段でも安定した昇降が可能であり、且つ階段の踊り場のような狭い場所でも旋回が可能な走行ロボットを提供する。
【解決手段】階段200を上昇又は下降するときに、ワイヤ7若しくはケーブル70の一端を階段200の上方部に固定し、車体1が階段200を降下するときはワイヤ7若しくはケーブル70を送り出し、車体1が階段200を上昇するときはワイヤ7若しくはケーブル70を巻取るように巻取装置5を制御し、且つ、角度検出器9が検出した車体1の角度に基づいて巻取りの停止及び巻取りの開始を制御するようにした。
(もっと読む)
移動ロボット
【課題】距離計測部を用いて高精度に位置決めを行う。
【解決手段】周辺物体までの距離と方向を計測する距離計測部3と、前記距離計測部が計測した周辺物体までの距離と方向を用いて目標物体の停止地点に対する当該移動ロボットの相対位置と相対方向を検出する相対姿勢検出部4と、前記相対位置と前記相対方向を用いて、前記移動機能部を制御する制御部5と、を備え、前記相対姿勢検出部は、前記目標物体を特定する線分を求めることにより、前記相対位置と前記相対方向を検出する。
(もっと読む)
倒立型移動体、その制御方法及びプログラム
【課題】倒立型移動体の操作性を向上させること。
【解決手段】倒立型移動体1は、搭乗者の重心移動に応じて倒立状態を維持して走行する。倒立型移動体1は、搭乗者が把持し上下方向へ伸縮可能なハンドル2と、ハンドル2の伸縮動作をロック状態及びロック解除状態にする第1ロック手段と、倒立状態を維持しつつ所望の走行を行うように制御する通常制御モードと、倒立状態を維持しつつ目標位置に停まるように制御する位置制御モードと、を有する制御手段と、第1ロック手段のロック状態及びロック解除状態の切替えと、前記制御手段のモード切替えと、を連動して実行させる切替手段と、を備える。
(もっと読む)
倒立型移動体制御装置、及びその制御方法
【課題】倒立型移動体の安全性を向上させる。
【解決手段】倒立型移動体の状態量を検出する状態検出手段123と、操作情報に応じた操作指令値を算出する指令入力手段122と、倒立型移動体の状態量に基づいて搭乗者の姿勢状態を推定する状態推定手段131と、倒立型移動体の状態量と駆動手段に対するトルク指令値とに基づき走行状態を判定する判定手段132と、推定された搭乗者の姿勢状態と判定された走行状態とに基づき走行状態毎に状態量、姿勢状態及びトルク指令値を調整する際の優先順位を設定し、優先順位に応じて制御パラメータの重みを算出する重み演算手段133と、判定された走行状態と算出された操作指令値とに基づいて判定された走行状態毎に検出される状態量の目標値となる指令値を算出する指令演算手段134と、算出された操作指令値と指令値と制御パラメータの重みとに基づいてトルク指令値を算出するトルク指令演算手段135とを備える。
(もっと読む)
自己位置推定装置、自己位置推定方法およびプログラム
【課題】自己位置を正確に推定することが可能な自己位置推定装置、自己位置推定方法およびプログラムを提供する。
【解決手段】自己位置推定装置は、撮影部、距離算出部、ランドマーク位置取得部、自己位置推定部、移動位置予測部、観測尤度計算部、視野内ランドマーク抽出部、撮影角度変更部、撮影制御部を有している。ランドマーク位置取得部は、各ランドマークの位置を取得する。自己位置推定部は、取得された画像、算出された距離、および上記位置に基づき自己位置を推定する。移動位置予測部は、推定された自己位置に基づき予測位置を算出する。撮影角度変更部は、視野内ランドマーク抽出部が抽出した視野内ランドマークについて観測尤度計算部が計算した観測尤度と、視野内ランドマークの観測角度とに応じて撮影角度を変更する。撮影制御部は、変更後の撮影角度で撮影した画像に基づき自己位置を更新する。
(もっと読む)
ロボット
【課題】人間との生活空間で使用出来るよう、設備の構造が極めて簡単であり、製造コストを極めて安価にすることが出来、障害物の存在する空間においても転倒することなく当該障害物を傷つけずに乗り越えることが出来るロボットを提供する。
【解決手段】ロボットに移動するための推進力を付与する推進力発生手段と、当該ロボットに浮揚力を付与する浮揚力発生手段とを備えることを特徴とし、当該浮揚力発生手段は、当該ロボットに働く重力をMg、当該浮揚力発生手段により発生される浮揚力をFとした場合に、Mg≧Fの関係を満足するよう設定されるロボットを採用する。
(もっと読む)
移動体および移動体の制御方法
【課題】センサの傾きに因む計測誤りの影響を低減して、より正確な位置姿勢推定が行える、移動体および移動体の制御方法を提供する。
【解決手段】移動体の周囲の環境を計測し、そのセンサデータと予め保持する地図データとを比較することにより移動体の前記地図データ上での位置と姿勢を推定し、その推定結果に基づいて目的地に移動する移動体において、前記距離センサの距離データを環境の幾何形状データに変換する距離センサ制御部と、計測点のセンサからの距離に応じて、前記距離センサ制御部で得られた幾何形状データと地図データのマッチング対象のサイズを設定する距離センサ誤差低減部と、前記距離センサ誤差低減部で設定されたマッチング対象のサイズで幾何形状データと地図データをマッチング処理し移動体の位置と姿勢を推定する位置姿勢推定部を備えたことを特徴とする。
(もっと読む)
重心角推定方法及び同方法によって制御される倒立車輪型走行体
【課題】倒立車輪型走行体において、必要最小限のセンサを用いて、倒立状態及び補助輪接地状態の両状態における重心角(搭乗者や搭載物と倒立車輪型走行体との合成重心角)を推定する方法を提供する。
【解決手段】補助輪が接地せず駆動輪のみで倒立する倒立状態と補助輪が接地する補助輪接地状態とを有する搭乗可能な倒立車輪型走行体について、倒立状態及び補助輪接地状態の各運動方程式に基づいて状態オブザーバを設計し、補助輪接地状態の状態オブザーバの状態方程式にはアフィン項を導入し、倒立状態及び補助輪接地状態の各状態オブザーバを用いて、両状態での搭乗者又は搭載物に起因する倒立車輪型走行体全体の重心角の変動分及び外乱、及び補助輪接地状態での床反力を推定する。
(もっと読む)
人工衛星の姿勢決定装置および人工衛星の姿勢決定方法
【課題】人工衛星に搭載された複数のセンサデータを用いて、人工衛星の直流から高周波成分までの姿勢変動を広帯域に決定する。
【解決手段】姿勢センサ(1)と低周波角速度センサ(2)と高周波角速度センサ(3)とが搭載された人工衛星から、各センサの観測データを取得し、人工衛星の姿勢決定値を出力する装置であって、姿勢センサによる姿勢観測値と、低周波角速度センサによる低周波角速度観測値を用いて低周波姿勢決定値を求める低周波姿勢決定部(5)と、低周波角速度センサによる低周波角速度観測値と、高周波角速度センサによる高周波角速度観測値とをミキシングして、姿勢決定の対象区間内の周波数域において平坦なゲイン特性と位相特性を有する広帯域角速度を求める相補フィルタ部(6)と、低周波姿勢決定値と広帯域角速度とを用いて広帯域姿勢決定値を求める広帯域姿勢決定部(7)とを備える。
(もっと読む)
歩行ロボット装置及びその制御プログラム
【課題】環境地図の作成と自己位置推定を、求められる精度を確保しつつ、安価に実現することのできる歩行ロボット装置及びその制御プログラムを提供する。
【解決手段】環境地図を作成する機能は、2ヶ所において撮影した地図作成用環境画像から撮影対象物を示す代表点を抽出し、代表点の位置と撮影した位置座標とから撮影対象物の位置座標を求め、撮影した地図作成用環境画像、代表点の位置及び前記撮影対象物の位置座標とを関連付けた環境地図を作成する。自己位置を推定する機能は、任意の位置座標において撮影した位置推定用環境画像中の撮影対象物の代表点に、対応する地図作成用環境画像中の撮影対象物の位置座標を対応させ、交会法によって前記歩行ロボット装置の自己位置を算出する。
(もっと読む)
無人車両および無人搬送システム
【課題】撮像手段が2つだけであっても姿勢角を修正しながら全方向に走行可能な無人車両および該無人車両を備えた無人搬送システムを提供する。
【解決手段】無人車両10は、それぞれ領域A1、A2の画像データを出力する2つの撮像手段11a、11bと、画像データに基づいて姿勢角を算出する姿勢角算出部と、姿勢角がゼロになるように車輪15の操舵角を制御する操舵制御部とを備える。姿勢角算出部は、第1方向に走行する際は、2つの撮像手段11a、11bから出力される2つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出し、第2方向に走行する際は、1つの撮像手段11aから出力される1つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出するか、または2つの撮像手段11a、11bから出力される2つの画像データにおけるマーカの位置に基づいて姿勢角を算出する。
(もっと読む)
航空機の制御システム、航空機、航空機の制御プログラム、及び航空機の制御方法
【課題】舵面の舵角を制御することによって飛行を制御する制御則から、舵面の舵角及びエンジン推力を制御することによって飛行を制御する制御則への切り替えを適切に行うことを目的とする。
【解決手段】航空機1の制御システム6は、舵面3の舵角を制御することによって飛行を制御する飛行制御則20、舵面3の舵角及びエンジン推力を制御することによって飛行を制御する舵面・推力統合飛行制御則22の何れかで飛行を制御するコンピュータ15と、舵面3の少なくとも1つが機能不良であることを検出する舵面故障損傷検出装置18を備え、舵面3の機能不良が検出された場合に、該検出結果に基づいて、所望の飛行特性を実現するために要する舵面3の舵角及び舵角の変化率を算出し、算出した舵角又は舵角の変化率が変化可能な範囲を超えているか否かを判定することによって、飛行制御則20から舵面・推力統合飛行制御則22への切り替えの要否を判定する。
(もっと読む)
侵入エリア検出システム
【課題】移動体に備える受光機において、投光機の投光する検出範囲に特定の方向から侵入した時のみ投光部の投光する光信号を検出させることを目的とする。
【解決手段】走行が可能で光信号を検出する受光機24を備える移動体20と、移動体20と脱着可能に構成され受光機24に光信号を投光する投光機32を備える移動体連結装置30とで構成される侵入エリア検出システム10であって、受光機24は、光信号を検出する複数の受光部25を扇状に備え、投光機32は、各受光部24と対になっており異なる種類の光信号を扇状に投光する投光部33を複数備え、受光部25は、各投光部33が光信号を投光することで特定する検出範囲に特定の方向から検出範囲に侵入した時のみ光信号を検出し、移動体20が投光部33が特定する検出範囲に侵入したことを検出することを特徴とする。
(もっと読む)
倒立型移動体及びその制御方法
【課題】特別なセンサを用いずに搭乗者の姿勢を推定可能とし、良好な制御を実現可能とする。
【解決手段】倒立型移動体201は、車輪106と、プラットフォーム101と、プラットフォーム101の鉛直方向に対する傾斜角と、車輪106の回転角度と、車輪106の回転駆動トルク指令と、車輪106の質量と、車輪106の半径と、車輪106の回転軸に関する慣性モーメントと、搭乗者202の質量と、プラットフォーム101と搭乗者102の重心との間の距離と、に基づいて、搭乗者102の鉛直方向に対する搭乗者姿勢を搭乗者姿勢推定値として推定する搭乗者姿勢推定器108と、プラットフォーム101の鉛直方向に対する傾斜角と、搭乗者姿勢推定器108で推定した搭乗者姿勢推定値と、車輪106の回転角度と、に基づいて、車輪106の回転駆動を制御する制御器103と、を備える。
(もっと読む)
駐車場の自動駐車システム
【課題】車両を、駐車開始位置から車両駐車スペースまで自動運転させて駐車できるようにする自動駐車システムの提供である。
【解決手段】車両8に搭載されたカメラ12が撮影した映像が、自動駐車センタ9の画像処理コンピュータ15に無線送信され、画像処理コンピュータ15は、カメラ12の映像から車両画像22と駐車場画像26とを作成し、ディスプレイ21に表示する。オペレータ25が模擬ステアリング23と模擬アクセルレバー24とを操作してディスプレイ21の車両画像22を駐車スペース画像27に駐車させたときのステアリング角度の変位とアクセルの変位とを車両8の自動駐車ECU13に無線送信し、車両8を駐車開始位置Pから駐車スペース5cまで自動運転させる。
(もっと読む)
車両
【課題】路面勾(こう)配に応じて車両の目標加速度を制限することによって、坂道であっても車体が路面に接触することなく、適切にバランスを保つことができ、路面勾配に関わらず、車両の安定した走行状態を実現することができるようにする。
【解決手段】回転可能に車体に取り付けられた駆動輪12と、該駆動輪12に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、路面勾配に応じて車両加速度の目標値を制限するものであって、該車両加速度の目標値の制限値を、車体接地に対応する制限値と駆動トルクの最大値に対応する制限値とのうちの少なくとも1つに基づいて設定する。
(もっと読む)
1 - 20 / 149
[ Back to top ]