
Fターム[5H301DD11]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体への指令の設定方法、設定手段 (1,386) | 誘導用ガイドを利用して与えられるもの (21)
Fターム[5H301DD11]に分類される特許
1 - 20 / 21
無人搬送システム
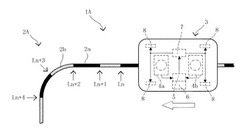
【課題】マーカーを設けることなく無人搬送車の走行速度を制御することができる無人搬送システムを提供する。
【解決手段】路面に敷設された誘導ライン2Aと、該誘導ライン2Aに沿って所定の走行速度で走行する無人搬送車3とを備えた無人搬送システム1Aであって、誘導ライン2Aは、異なる色で着色された複数の着色領域2a、2bを有し、無人搬送車3は、誘導ライン2Aを含む領域の画像データを生成する撮像手段4a、4bと、生成された画像データにおける着色領域2a、2b間の境界線の数に基づいて目標速度を設定する目標速度設定部5と、目標速度に一致するように走行速度をフィードバック制御する走行制御部7と、境界線の数と走行速度との関係があらかじめ格納された記憶部6とを有することを特徴とする。
(もっと読む)
電動式ランナ

【課題】任意の機器が接続され、敷設されたダクト状のレールに沿って容易に位置を変更することができる電動式ランナを提供する。
【解決手段】電動式ランナ1は、レール2に走行自在に係合されると共に任意の機器9が接続されるランナ11と、ランナ11に設けられランナ11を自走させるアクチュエータ12とを備えている。ランナ11は、ダクト2に係合する係合部14と、機器9を接続するためのコネクタ15とを備えている。ランナ11は、電動式ランナ1にプラグ機能(挿入着脱機能)を付与する。アクチュエータ12として、衝撃力によってランナ11を自走させるインパクトアクチュエータを用いることができる。電動式ランナ1は、アクチュエータと共に自走するので、従来の配線ダクト用のプラグと異なり、移動のための着脱が不要であり、容易に位置を変更することができる。
(もっと読む)
無人搬送システム
【課題】マーカーを設けることなく無人搬送車の走行速度を制御することができる無人搬送システムを提供する。
【解決手段】誘導ライン2Dと、無人搬送車とを備えた無人搬送システムであって、誘導ライン2Dは、異なる3つの色が順繰りに現れるように着色された3種類の着色領域2a、2b、2cを有し、無人搬送車は、撮像手段と、着色領域2a、2b、2cの色に基づいて目標速度を設定する目標速度設定部と、走行制御部と、3種類の着色領域2a、2b、2cの色の順番に基づいて走行方向を特定する走行方向特定部と、着色領域2a、2b、2cの色と走行速度との関係および3種類の着色領域2a、2b、2cの色の順番と走行方向との関係があらかじめ格納されており、かつ着色領域の色の履歴が格納される記憶部と、を有することを特徴とする。
(もっと読む)
有軌道台車システム
【課題】有軌道台車システムにおいて、分岐点及び合流点を通過する台車の不要な速度低下や走行停止を抑制する。
【解決手段】有軌道台車システムは、分岐点及び合流点を含む所定領域内に誘導線を有する軌道と、軌道に支持されると共に案内されて走行する複数の台車とを備える。複数の台車の各々は、互いに周波数の異なる複数の信号を夫々発信可能な発信手段910,920と、発信手段から発信された複数の信号を誘導線へと夫々送信する送信手段810,820と、誘導線を介して伝達された複数の信号を夫々受信可能な受信手段710,720と、受信手段において受信された信号の種類に基づいて、台車の減速若しくは停止、又は走行の続行を判定する判定手段955と、判定手段における判定結果に応じて台車の走行を制御する制御手段960とを有している。
(もっと読む)
無人搬送車の走行制御装置、および無人搬送車
【課題】特殊なキャスタを使用しなくても、路面の補強にかかる手間およびコストの低減と、失敗のない荷物の受け渡しとを可能にする無人搬送車の走行制御装置、および無人搬送車を提供する。
【解決手段】走行制御装置7は、車体2の走行方向一方側および他方側に各1つ設けられ、走行ガイド10からの位置ずれに関する信号を出力する2つのガイドセンサ3、4と、各ガイドセンサ3、4から出力された信号に基づいて操舵制御を行う操舵制御部8とを備え、操舵制御部8は、スイッチバック後、所定距離を走行するまでの間または所定時間が経過するまでの間は、走行方向前側にあるガイドセンサ3の位置ずれが予め設定されたゼロ以外の目標位置ずれ量となり、かつ走行方向後側にあるガイドセンサ4の位置ずれが実質的にゼロとなるように操舵制御を行う。
(もっと読む)
自律走行作業車の制御装置
【課題】走行予定領域における作業車の位置を簡易な校正で検出するようにした自律走行作業車の制御装置を提供する。
【解決手段】角速度センサの出力に基づいて算出される進行方位に基づいて原動機を駆動して方位(地磁気)センサの出力に従って走行予定領域の境界を所定の起点から周回走行し、周回走行の間、算出される進行方位と走行距離を複数のビットに分割されてなるビットマップ上に順次記録して走行予定領域の境界線についての走行軌跡を生成し(S10からS14)、生成された走行軌跡を地図情報に変換し(S18)、地図情報のビットから作業車の位置を特定(検出)し、方位センサの出力から得られる規定方位を基準とし、算出される進行方位と走行距離と検出される位置とに基づき、作業車を直進走行させつつ、作業させる(S20)。
(もっと読む)
搬送車システム
【課題】搬送車の自動走行を継続させつつ、作業用エリアへの搬送車の侵入を防止することが可能な搬送車システムにおいて、作業用エリアでの安全性を向上させる。
【解決手段】搬送車システム1について説明する。搬送車3は、軌道2に沿って走行する。第2光電センサ48は、搬送車3に設けられている。通行禁止ゲート71は、軌道2に設置可能であり、第2光電センサ48によって検出可能なミラー87を有する。第1リミットスイッチ95は、軌道2に設けられ、通行禁止ゲート71が軌道2に設置されたことを検出する。コントローラ本体54は、第2光電センサ48からの検出結果によって通行禁止ゲート71が設置されたことを把握すれば、通行禁止ゲート71の片側を自動走行許可エリアに設定することを有効にする。
(もっと読む)
無人搬送車の走行制御装置
【課題】磁気マーカを検出するマーカセンサの検出精度を向上できる無人搬送車の走行制御装置を提供する。
【解決手段】無人搬送車の車体に対し、走行路面に敷設された誘導テープ12の位置を検出するホール素子よりなる検出素子25〜25を設ける。検出素子25の左右両側方に第1〜第4マーカセンサ31〜34を設け、各センサ31〜34により走行路面に敷設された磁気マーカ14B,14Cを検出する。検出素子25及び各マーカセンサ31〜34の上方に磁性体35を配設し、各センサ31〜34の検出感度を向上する。磁性体35の左端部が分岐誘導テープ13の上方に移動されると、該左端部が分岐誘導テープ13の磁束により磁化(N極化)され、磁性体35の右端部がS極化される。磁性体35の磁力により第3マーカセンサ33が作動されてON信号が出力されても、このON信号を無効とする判定を行う。
(もっと読む)
経路探索システム及び方法、搬送システム、並びにコンピュータプログラム
【課題】経路探索システムにおいて、取り扱うデータ数及び演算負荷を低減しつつ、最適経路を探索する。
【解決手段】経路探索システム(100)は、被搬送物を搬送するための搬送車(2)を該搬送車の経路上で出発地点から目標地点まで移動させる際の最適経路を探索する。経路探索システムは、複数の作業装置を含んで構成される集合を少なくとも一つ含む複数の集合の各々をノードとし且つ該複数の集合の相互間をリンクとして規定される、搬送車の移動コストを格納する格納手段(9)と、格納された移動コストに基づいて、最適経路の少なくとも一部を、複数の集合を結ぶ単位で探索する経路探索手段(6)と、探索された少なくとも一部と、複数の集合のうち前記探索された少なくとも一部に含まれる一又は複数の集合の内部に存在する前記経路の部分とを統合することで、最適経路を特定する経路特定手段(7)とを備える。
(もっと読む)
走行車システム
【構成】 走行ルートの周回距離Lとこれを複数に分割した分割距離Pとを記憶し、エンコーダ信号eから e modP=d e=cP+d となる値c,dを求めて、(c,d)を現在位置とする。
【効果】 1個の基準マークでかつ簡単な補正演算により、エンコーダへの補正を施すことができる。
(もっと読む)
天井走行車
【構成】 カセット20をラテラルドライブ8で左右動させながら、カセット20の背面下部に設けたID23を、天井走行車4の走行中にIDリーダ26で読み取る。
【効果】 余分の時間を必要とせずに、IDを確実に読み取れる。
(もっと読む)
移動体システム
【構成】 移動体2の走行方向に平行に2列に磁気マーク21,22を配置し、2個のリニアセンサ16,17で各磁気マーク21,22を基準とする絶対位置を求める。各磁気マーク21,22の中心の原点基準の絶対位置を記憶し、検出する磁気マークを切り替えながら、移動体2の絶対位置を求める。
【効果】 離散的に配置した磁気マークで、移動体の絶対位置を連続的に検出できる。
(もっと読む)
移動体設備
【課題】移動体同士の衝突を簡素な構成により回避することができる移動体設備を提供すること。
【解決手段】複数の移動体3a,3bの夫々に、走行駆動手段SM1,AMP1,SM2,AMP2の駆動量を検出する駆動量検出手段RE1,RE2が設けられ、移動体同士の車間を監視する車間監視用制御手段Wが、移動体の夫々について、駆動量検出手段にて検出される駆動量情報C1,C2に基づいて得られる予測走行移動量と、走行位置検出手段DET1,DET2にて検出される走行位置情報D1,D2に基づいて得られる実走行移動量との対応関係により走行位置情報が適正であるか否かを判別し、適正であると判別された複数の移動体についての適正走行位置情報に基づいて、移動体同士の間隔が予め設定された許容間隔以上離れているか否かを判別し、移動体同士の間隔が許容間隔以上離れていないと判別した場合には、全ての移動体の走行を停止させるように構成されている移動体設備を構成した。
(もっと読む)
搬送設備の運転支援方法
【課題】予測可能な状況のもとでの生産再開の手段を提供し、生産への影響を最小限に低減するようにした搬送設備の運転支援方法を提供すること。
【解決手段】搬送装置によりワークを複数の供給保管装置と製造装置とに順次搬送するようにした搬送設備において、搬送設備が停止した後の復旧を行うに際し、停止した搬送設備の状況を特定するとともに、特定した状況を初期状態として、予め準備した複数のシナリオに基づいてシミュレーションを行い、シミュレーションの結果の中から生産への影響が最も好ましい結果を得たシナリオに従って復旧作業を行う。
(もっと読む)
コークス炉における移動機の自動運転方法
【課題】衝突防止策を講じた上で複数の移動機を併用し、コークス炉の効率的な運用を図る。
【解決手段】移動機のレール8に平行に敷設した誘導無線線路9および移動機に搭載した車上局31からの位置情報を取得して走行エリアを監視し、衝突を防止しつつ、CDQ設備における冷却塔の装入レベル情報に基づき、バケット車の運転を優先させる。
(もっと読む)
走行車の走行制御システム及び走行車
【課題】 第1の走行路が複数の第2の走行路に分岐する分岐点を有する走行路網において、第1の走行路から、第2の走行路のうち所定の走行路への走行車の進入を簡易に実現することができる走行車の走行制御システム及び走行車を提供する。
【解決手段】 無人搬送車Vの走行制御システムSでは、走行路R1を分岐点Pに向かって走行する無人走行車Vは、分岐点Pに到達する前に、無人搬送車Vが走行すべきライン番号等を示す行先情報を取得すると共に、ライン1〜5のいずれか1つであるライン番号を示す分岐情報を、分岐点Pの上流側に設けられたIDタグ4から取得する。そして、無人搬送車Vは、ライン番号を示す行先情報と分岐情報とを照合し、その結果に基づいて、走行路R1から走行路R21又は走行路R22に進入する。
(もっと読む)
搬送車システム
【構成】 搬送車5に振動センサやトルクセンサなどを搭載し、異常データを搬送車コントローラ10に送信する。搬送車コントローラ10は、異常データを区間別と搬送車別に記憶し、同じ区間で複数の搬送車から異常データが得られたか、正常区間でも搬送車から異常データが生じるかから、異常のある走行ルートの区間と搬送車とを特定する。
【効果】 走行ルートと搬送車の双方の状態を検査でき、しかも問題が走行ルートにあるのか搬送車にあるのかも判別できる。
(もっと読む)
有軌道台車、搬送装置及び有軌道台車の制御方法
【課題】 軌道上を自律走行し、先行台車への衝突を防止でき、且つ搬送効率が高い有軌道台車、それを備えた搬送装置、及び有軌道台車の制御方法を提供する。
【解決手段】 軌道2上を自律走行する有軌道台車41において、台車本体3の両側部から有軌道台車41の走行方向前方に延びるアーム34を設け、このアーム34の先端に光電センサである台車センサ35を取り付ける。アーム34及び台車センサ35は、台車本体3よりも下方に配置する。これにより、有軌道台車41が先行台車41aに接近したときに、台車センサ35が床面100と先行台車41aとの間に挿入され、先行台車41aを検知する。
(もっと読む)
搬送車システム及びルートマップの作成方法
【構成】 搬送車システムのレイアウト上位置が既知な点に基準マーク18を設け、その座標をルートマップに記載する。移載を行う位置に移載マーク20を設け、基準マーク18からの距離を搬送車14のエンコーダで求め、ルートマップに記載する。実走行時は、基準マーク18を検出すると搬送車14の内部座標を基準マークの座標で更新し、移載マーク20の位置で停止する。
【効果】 ルートマップを容易に作成できる。
(もっと読む)
天井走行車システム
【構成】 イントラベイルート6の側方にサイドバッファ18を、下方に下方バッファ20を設置すると共に、バッファを設置した区間8に櫛歯マークを設け、天井走行車12でカウントする。バッファ18,20の停止データをデータ送出部10から天井走行車へ供給する。
【効果】 バッファをロードポートの無い位置にも多数設置でき、かつバッファを増設/撤去自在に設置しても、天井走行車に停止データを供給できる。
(もっと読む)
1 - 20 / 21
[ Back to top ]