
Fターム[5H301DD17]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体への指令の設定方法、設定手段 (1,386) | 無線により与えられるもの (358) | 電波により与えられるもの (167)
Fターム[5H301DD17]に分類される特許
1 - 20 / 167
無人走行体を用いた環境情報の取得システム
【課題】粉塵、煙又は水蒸気が立ち込める劣悪な環境下においても、無人走行体の遠隔操縦を円滑に行うことができ、かつ構築物内の状況を明確に把握可能な無人走行体を用いた環境情報の取得システムを提供する。
【解決手段】遠隔操縦装置305を用いてオペレータにより遠隔操縦される無人走行体5に、走査式二次元測距装置105及び走査式三次元測距装置106を搭載する。走査式三次元測距装置106の検出データから作成される三次元画像を表示装置302に表示し、無人走行体5を遠隔操縦する際の参照データとして利用する。また、走査式二次元測距装置105の検出データをUSBメモリ306に順次記憶し、このUSBメモリ306に記憶された走査式二次元測距装置105の検出データを合成することにより作成される三次元画像を、構築物内の環境情報として利用する。
(もっと読む)
無人走行体の遠隔操縦システム

【課題】通常のカメラによっては鮮明な環境情報を取得することが困難な環境に無人走行体が投入された場合にも、無人走行体を正確、容易かつ高能率に遠隔操縦可能な遠隔操縦システムを提供する。
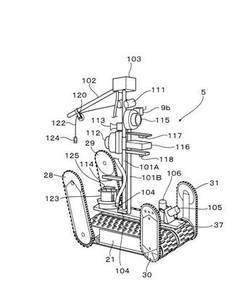
【解決手段】無線無人走行体5に、レーザ光走査式三次元測距装置106と、往路前方カメラ112と、メインカメラ113と、復路前方カメラ115と、俯瞰カメラ118とを搭載する。安全な場所に設置された表示装置に、レーザ光走査式三次元測距装置106により検出された三次元画像と、各カメラ112,113,118により撮影された映像を表示する。オペレータはこれらの三次元画像及びカメラ画像を参照しながら、無線無人走行体5の遠隔操縦を行う。
(もっと読む)
無人走行体の遠隔操縦システム
【課題】簡単かつ安価な構成で、無人走行体の活動範囲を延長可能な無人走行体の遠隔操縦システムを提供する。
【解決手段】LANケーブル1を介して接続された第1及び第2の操作卓2,3と、第1操作卓2から出力される制御信号により遠隔操縦される有線無人走行体4と、第2操作卓3から出力される制御信号により遠隔操縦される無線無人走行体5と、第2操作卓3と有線無人走行体4とを接続する通信ケーブル6,7と、通信ケーブル6と通信ケーブル7との間に配置された無線中継装置8と、有線無人走行体4と無線無人走行体5とを接続する無線通信装置9と、通信ケーブル6を巻回したケーブルリール10とをもって、無人走行体の遠隔操縦システムを構成する。
(もっと読む)
無人走行体を用いた環境情報の取得システム
【課題】粉塵、煙又は水蒸気が立ち込める劣悪な環境下においても構築物内の環境を正確に取得可能な環境情報の取得システムを提供する。
【解決手段】遠隔操縦装置を用いてオペレータにより遠隔操縦される無人走行体5に、走査式二次元測距装置105と、放射線検出器116を搭載する。また、安全な場所には、遠隔操縦装置を備えた制御装置本体を設置する。制御装置本体は、遠隔操縦装置の操作内容に応じた制御信号を出力して無人走行体5の走行制御を行いながら、走査式二次元測距装置105の検出データから生成される三次元画像と、放射線検出器116の検出データを合成し、制御装置本体に接続された表示装置に表示する。
(もっと読む)
無人走行体の遠隔操縦システム
【課題】2台の無人走行体を容易かつ安定に遠隔操縦することが可能な無人走行体の遠隔操縦システムを提供する。
【解決手段】第1の表示装置202を第2の表示装置302の左側に配列し、第1の表示装置202の駆動制御画面210中に表示される撮影カメラ85,86の撮影映像を、駆動制御画面210の右側辺に沿って設けられた表示部211に表示すると共に、第2の表示装置302の駆動制御画面310中に表示されるメインカメラ113の撮影映像を、駆動制御画面310の左側辺に沿って設けられた表示部311に表示する。
(もっと読む)
無人走行体を用いた環境情報の取得システム
【課題】粉塵、煙又は水蒸気が立ち込める劣悪な環境下においても鮮明な環境情報を取得可能な無人走行体を用いた環境情報の取得システムを提供する。
【解決手段】遠隔操縦装置305を用いてオペレータにより遠隔操縦される無人走行体5に、走査式二次元測距装置105と、前方監視用の光学カメラ(メインカメラ)113を搭載する。また、安全な場所には、遠隔操縦装置305を備えた制御装置本体301を設置する。制御装置本体301は、遠隔操縦装置305の操作内容に応じた制御信号を出力して無人走行体5の走行制御を行いながら、走査式二次元測距装置105の検出データを1走査毎に、制御装置本体301に接続されたUSBメモリ306に記憶する。また、光学カメラ113の撮影映像もUSBメモリ306に記憶する。
(もっと読む)
自動搬送システム
【課題】コストを抑制しつつ、走行経路の変更要求に柔軟に対応できる自動搬送システムを提供すること。
【解決手段】操舵可能な駆動輪を含む駆動ユニット、及び駆動ユニットを制御する制御ユニットを備えた自動搬送車2と、自動搬送車2の位置を検知する位置検知手段と、を備え、予定された経路に沿って自動搬送車2を移動させる自動搬送システム1では、自動搬送車2が移動するエリアとして、位置検知手段による検知位置を利用して自動搬送車2が制御される誘導走行エリア1A、及び自動搬送車2の位置が検知されないエリアであって検知位置を利用することなく自動搬送車2が制御される自律走行エリア1Bが設定されている。
(もっと読む)
改札案内ロボット
【課題】自動改札機でICカードをうまく使えない利用者に対して再タッチ行為を行えるように迅速に、丁寧に、分かりやすく応対できる改札案内ロボットを提供する。
【解決手段】改札案内ロボット10は、自律移動型の装置構成(12,43,44)と案内情報提供部(22)とロボット制御装置41を備え、必要が生じたときに自動改札機31に接近してその改札機能を補助・支援する。自動改札機の無線通信装置37と間で相互に情報の送受を行う無線通信装置42と、ICカードリーダ・ライタと、ICカード処理装置45とを備える。自動改札機でICカード処理未了が生じたとき、自動改札機からの出動指令に基づいて自動改札機に接近し、通行不能状態にある利用者に対し案内情報提供部を介して自身のICカードリーダ・ライタへのICカードタッチ行為を促す。
(もっと読む)
自動追尾式自走台車
【課題】差動式キャスタを備えた自走台車において、自動追尾機能を有する自動追尾式自動台車を提供する。
【解決手段】自動追尾式自走台車1は、差動式キャスタ(31,32,33)と、自動追尾装置と、を備える。差動式キャスタ(例えば、31)は、互いに独立して回転駆動する第1および第2の駆動輪(30e,30f)を有し、台車本体2に対して駆動方向を自在に可変することができる。そして、自動追尾装置は、被追尾体Pに対する台車1の距離および角度に関する情報を検出する検出手段(11,12)と、検出手段(11,12)により検出された情報に基づき台車1が走行すべき方向、および走行または停止を決定するとともに、決定された情報に基づき差動式キャスタ(31,32,33)に制御電流を供給する制御装置20と、を備える。
(もっと読む)
車両用遠隔操作装置
【課題】操作者にとって煩わしくなく、且つ、安全に車両の遠隔操作が可能な遠隔操作装置を提供する。
【解決手段】車両用遠隔操作装置100は、ユーザが所持するリモコン3から送信されるトリガ信号及び強度確認用信号を受信する受信部と、トリガ信号の受信に伴い、車両1を自動走行させる車両制御部と、受信された強度確認用信号の電波強度が予め設定された規定値以下であるか否かを判定する電波強度判定部と、強度確認用信号の電波強度が、規定値以下である場合に車両制御部に車両1の自動走行を禁止させる禁止部と、を備える。
(もっと読む)
有軌道台車システム
【課題】有軌道台車システムにおいて、台車の不要な速度低下や走行停止を抑制する。
【解決手段】有軌道台車システムは、分岐点及び合流点を含む所定領域内に誘導線(600)を有する軌道(100)と、軌道を走行する複数の台車(200)と、誘導線管理装置(700)とを備える。複数の台車の各々は、送信部及び受信部(910,920)と、走行制御部(205)とを備える。誘導線管理装置(700)は、誘導線受信部及び誘導線誘導線送信部(710,720)と、特定台車(250)の第1の無線信号受信部(930)に対して無線信号を送信可能な第1の無線信号送信部(740)とを備えており、一の誘導線領域に一の特定台車を優先させて進入させる場合に、一の誘導線にブロッキング信号を送信すると共に、一の特定台車に対して一の誘導線領域内への進入を許可する許可信号を送信する。
(もっと読む)
車両遠隔操作装置、車両遠隔操作方法及びプログラム
【課題】車両と障害物との接触を回避しつつ、当該車両を遠隔から安全に操作する。
【解決手段】車両30を移動させる際に、まず、車両の現在の位置と、目標位置との間の軌跡を算出する(ステップS204)。次に、算出した軌跡に沿って、車両を駐車スペースPSから目標位置まで移動させる(ステップS208,S210)。その際、撮影装置21から出力される画像情報によって規定される画像に対して、車両の軌跡上に位置する障害物の検出を行う(ステップS207)。そして、車両の軌跡上に障害物が検出された場合に、車両の移動を停止する(ステップS209)。
(もっと読む)
カメラ付スキーロボット
【課題】
赤外線対人検知式自動追尾型カメラを支持し、ラジオコントロール操作により、被写体スキーヤーと共に滑りながら、優れた映像を撮影することを可能とした、スキーロボットを提供する。
【解決手段】
駆動装置を内蔵する箱型のケース本体の底部には、先端が筒体となっている左右それぞれ2本の足を設け、スキー板の上面に固定されている棒状の門型支持具の水平部の棒体が前記筒体に回転自在に貫通し、該水平部の棒体の中央部から、頂部に筒部を形成する垂直支持体を垂設し、前記ケース本体の上方側面を貫通する貫通孔に貫通するコの字状の棒体が前記筒部に回転自在に嵌合し、前記ケース本体の上部に、赤外線対人検知式自動追尾型カメラを設けるとともに該ケース本体の後方部に先端が鋸刃状の鍬状体を設けてなるカメラ付スキーロボットとして課題を解決している。
(もっと読む)
遠隔操作用マーキング装置
【課題】マーキング部の位置決めを的確に行う上で有利な遠隔操作用マーキング装置を提供する。
【解決手段】遠隔操作用マーキング装置200は、被マーキング位置にマーキングを行うマーキング部12と、作業車両110で支持されマーキング部12を移動させるマーキング部用移動機構14とを備える。マーキング部用移動機構14は、遠隔操作によってガイド部材20を旋回させる旋回機構18と、直線状に延在するガイドロッド2002と、マーキング部12を支持すると共に、ガイドロッド2002にその延在方向に沿って移動可能に支持された移動体22と、移動体22をガイドロッド2002に沿って移動させる移動体用移動機構24とを備えている。
(もっと読む)
ロボットシステム
【課題】ネットワークデータブリッジおよび移動式ロボットを備えるロボットシステムが提供される。
【解決手段】ネットワークデータブリッジ202は、インターネットプロトコルネットワークに接続可能な広帯域ネットワークインターフェイスと、無線コマンドプロトコルネットワークに接続可能な無線コマンドインターフェイスと、広帯域ネットワークインターフェイス経由で受信するシリアルコマンドを抽出し、無線コマンドインターフェイス経由でブロードキャストするデータブリッジ構成要素と、を備える。また、移動式ロボット104は、ロボットを動かす駆動システムと、ネットワークデータブリッジから送信されるシリアルコマンドを受信する無線コマンド通信構成要素と、を備える。さらに、ネットワークデータブリッジは、製造者サーバおよび移動式ロボット間の通信のため、広帯域ネットワークインターフェイスを介して製造者サーバに接続可能である。
(もっと読む)
自律カバレッジロボットナビゲーションシステム
【課題】ナビゲーションビーコンにより自律モバイルロボットを隣接する有界領域に移動可能とする。
【解決手段】ナビゲーションビーコンは、第1の有界領域と、隣接する第2の有界領域との間のゲートウェイ内に配置されたナビゲーションビーコンによって、ゲートウェイマーキングエミッションを伝送するように構成されたゲートウェイビーコンエミッタを有し、自律カバレッジロボットは、ビーコンエミッションに応答するビーコンエミッションセンサ(104、106)と、ゲートウェイマーキングエミッションの検出に応えてロボットの方向を変える清掃モードで、ロボットを第1の有界領域周辺にて動かすように構成された駆動システムとを含み、駆動システムは、マイグレーションモードにおいて、ゲートウェイを通って第2の有界領域へとロボットを動かす。
(もっと読む)
電波計測システム
【課題】屋内エリアの地図データを作成し、作成した地図データに基づいて管理者により指定された経路を自律的に移動しながら電波環境データを測定する。
【解決手段】周囲の壁面までの距離を方位毎に測距する測距センサ207と、屋内エリア内に設置されたアクセスポイントからの電波の受信電力を予め定めた一定の時間間隔で測定する受信電力測定部203と、受信電力測定部203で測定された受信電力データの大きさを判定する受信電力判定部215と、測距センサ207により測距された測距データから屋内エリアの地図データを作成する地図データ作成部217と、サーバから与えられる走行データにより指定される走行経路に沿って自律的に自ロボットを走行させる走行手段208、209と、受信電力判定部215の判定結果に基づいて走行手段を構成するモータ209の回転速度を制御して自ロボットの移動速度を制御するモータ回転制御部216とを備える。
(もっと読む)
無人移動体及び無人移動体の制御方法
【課題】道路のある環境下で且つ道路や交差点に関する事前情報が一切ない状況下で、曲がり道や交差点を道なりに走行させることができ、交差点での右左折も曲折の指示のみで円滑に行わせ得る無人移動体及び無人移動体の制御方法を提供する。
【解決手段】特に指示がない場合には、それまで走行してきた走行路に継続し易い道なり走行路Rを測距データに基づいて局所地図上で抽出して、この道なり走行路Rに沿って半自律走行車Aを自律走行させ、交差点Cで他の走行路Rlへ向かわせる場合には、交差点進入時に受ける新規操舵指令に従った他の走行路Rlへの変更路Rcを設定して、この変更路Rcを介して半自律走行車Aを他の走行路Rlへ進行させる。
(もっと読む)
ロボットシステム
【課題】ロボットシステムの各構成要素のバッテリー寿命が全体的なシステムの操作性に影響を与える。
【解決手段】省電力ロボットシステム200は、移動式ロボット104および少なくとも1つの周辺装置のある環境下に置かれる、ネットワークデータブリッジ202を含む。ネットワークデータブリッジ202は、インターネットプロトコルネットワークに接続可能な広帯域ネットワークインターフェイス210と、無線コマンドプロトコルネットワークに接続可能な無線コマンドインターフェイス204と、該インターネットプロトコルから該広帯域ネットワークインターフェイス210を介して受信されるシリアルコマンドを抽出し、移動式ロボット104および周辺装置に受信されるように、狭帯域無線インターフェイスを介して該シリアルコマンドをブロードキャストするデータブリッジ構成要素202と、を備える。
(もっと読む)
ネットワークシステム、コントロール方法、コントローラ、およびコントロールプログラム
【課題】コントローラからの指令に基づいて移動する模型装置を利用した新たなネットワークシステムを提供する。
【解決手段】コントローラ100は、模型装置を移動させるための指令を受け付け、指令を模型装置へ送信する。模型装置200は、コントローラからの指令に基づいて模型装置を移動させ、模型装置の前方を撮影し、模型装置の位置を取得し、模型装置の向きを取得し、撮影画像と位置と向きとをコントローラに送信する。コントローラは、模型装置から受信した位置と向きとに基づいて、模型装置用のコースのデータから表示用のバーチャル画像を作成し、模型装置から受信した撮影画像とバーチャル画像とを合成した画像をディスプレイ130に表示させる。
(もっと読む)
1 - 20 / 167
[ Back to top ]