
Fターム[5H301KK01]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 集中監視制御 (930) | 地上設備を制御するもの (13)
Fターム[5H301KK01]に分類される特許
1 - 13 / 13
搬送システム
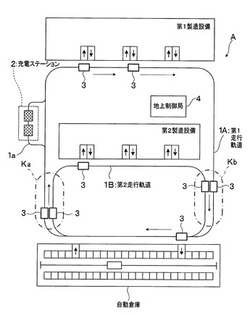
【課題】搬送車両の充電作業が搬送作業に与える影響を従来よりも低減すると共にバッテリの大型化を抑制する。
【解決手段】蓄電池によって駆動され、電力を外部から受電及び外部に給電する複数の搬送車両3と、搬送車両3が走行する複数の走行軌道1A,1Bと、ある走行軌道1Aと他の走行軌道1Bとが隣接するエリアであって、ある走行軌道1Aを走行する搬送車両3と他の走行軌道1Bを走行する搬送車両3とが給電/受電する受給電エリアKa,Kbとを具備する。
(もっと読む)
群ロボット制御システム、群ロボット制御装置、及び群ロボット制御方法

【課題】労力や訓練を必要とせずに、直感的に複数のロボットの整列制御を行うことができる群ロボット制御システムを提供する。
【解決手段】群ロボット制御システム100は、自走によって移動可能な複数のロボット101〜109と、線分を描くことで複数のロボット101〜109の整列パターンを入力するためのタッチパネル20と、タッチパネル20に入力された整列パターンに基づいて、複数のロボット101〜109の移動を制御するための制御信号を生成する制御信号生成部と、制御信号生成部にて生成された制御信号を複数のロボット101〜109に対して送信する制御信号送信部とを備えている。
(もっと読む)
自律走行作業車の制御装置
【課題】走行予定領域における作業車の位置を簡易な校正で検出するようにした自律走行作業車の制御装置を提供する。
【解決手段】角速度センサの出力に基づいて算出される進行方位に基づいて原動機を駆動して方位(地磁気)センサの出力に従って走行予定領域の境界を所定の起点から周回走行し、周回走行の間、算出される進行方位と走行距離を複数のビットに分割されてなるビットマップ上に順次記録して走行予定領域の境界線についての走行軌跡を生成し(S10からS14)、生成された走行軌跡を地図情報に変換し(S18)、地図情報のビットから作業車の位置を特定(検出)し、方位センサの出力から得られる規定方位を基準とし、算出される進行方位と走行距離と検出される位置とに基づき、作業車を直進走行させつつ、作業させる(S20)。
(もっと読む)
生産設備制御システムおよび生産設備制御方法
【課題】作業者が生産設備の電源制御の指示を認識することができる生産設備制御システムを提供する。
【解決手段】本発明の生産設備制御システム100は、設備制御部120、放送装置130、および情報収集器140を有する。設備制御部110および放送装置120は、可聴音帯域の特定周波数の信号レベルを特定周波数より低い周波数で周期的に変化させて生成された音波を送信する。情報収集器140は、音波を受信して特定周波数の信号レベルを選択的に抽出し、抽出された特定周波数の受信信号レベルの変動が設備制御部120による送信信号レベルの周期的な変化に対応する場合、特定周波数の周波数成分を解析した結果に基づいて制御対象設備150,160に対して電源制御または運転制御を実行する。
(もっと読む)
移動体システム
【課題】 移動体の位置を連続的に監視しながら、移動体を駆動するリニアモータの1次側を連続的に制御する。
【構成】 リニアモータの2次側部材を備えた複数の移動体と、移動体の移動経路に沿って2次側部材の長さ以下のピッチで複数設けられたリニアモータの1次側部材とを設ける。移動体の位置を検出するセンサを2次側部材の長さ以下のピッチで設けると共に、センサからの位置信号により1次側部材を制御するコントローラを設ける。
(もっと読む)
搬送車システム
【課題】操作者の安全を確保しつつ、システムを停止することなく搬送車を手動操作可能にする搬送車システムを提供する。
【解決手段】搬送車システムは、操作端末45と、通信装置43と、搬送車3とを備えている。操作端末45は、手動操作が可能である。通信装置43は、操作端末45により操作可能である。搬送車3は、通信装置43とは別体であり、通信装置43を介して操作端末45と通信が可能な無線通信処理部と、操作端末45と直接通信が可能な有線通信処理部とを有する。
(もっと読む)
搬送車システム
【課題】自動倉庫等からステーションに荷物が次々と搬入される場合に、搬送の遅れを低減し、搬送効率を向上させることができる搬送車システムを提供する。
【解決手段】搬送車システムは、予め設けられた一方通行の走行経路110と、走行経路110に沿って配置され、荷物200が載置されるステーション120と、走行経路110に沿って走行することにより、ステーション120に載置された荷物200を目的地まで搬送する複数の搬送車130と、複数の搬送車130を制御する搬送車コントローラ150とを備え、搬送車コントローラ150は、ステーション120から搬送する予定の荷物の数量である搬送予定数量を取得する数量取得部と、搬送予定数量よりも一つ少ない数以上の搬送車130が、ステーション120より走行経路110の上流側の位置に待機するように複数の搬送車130を制御する制御部とを有する。
(もっと読む)
自動搬送システムおよび自動搬送システムにおける搬送車の待機位置設定方法
【課題】搬送車の待機位置の最適化を図ることによりキャリアを効率的に搬送することが可能な自動搬送システムおよび待機位置の設定方法を提供する。
【解決手段】断続的に供給される搬送指令に基づいて所定の経路網を自動的に移動して経路網に沿って設置された複数の処理装置間において搬送物を搬送する少なくとも1台の搬送車と、搬送車制御手段と、複数の停止位置、複数の移動位置、処理装置の各々の搬送物の単位時間あたりの処理数とが記録された記録手段と、搬送車が搬送指令を受ける前の待機状態にあるときの待機位置設定手段とを含み、待機位置設定手段は、記録手段に記録された停止位置、移載位置および処理能力情報に基づいて、停止位置のうちの何れかを待機位置としたときの当該停止位置と移載位置の各々との間の搬送車の搬送指令に基づく単位時間あたりの総移動距離を停止位置毎に算出し、そのうち最小値に対応する停止位置を待機位置として設定する。
(もっと読む)
無人搬送車を用いた混流作業ラインシステム
【課題】 無人搬送車(AGV)を用いた作業ラインにおいて、作業装置を介してワークに確実に対応する作業を実施する。
【解決手段】 誘導経路Rに沿って移動するAGVに作業内容が異なるワークをそれぞれ搭載し、並列配置された作業ゾーンに搬送するAGVを用いた混流作業ラインシステムであって、対応する作業内容情報に基づいて各ワークに対して作業を実施する作業装置を作業ゾーンに有し、各ワークの作業内容情報を各ワークの識別番号に対応付けて管理し、各AGVの識別番号と該AGVが搬送するワークの識別番号とを対応付けて管理し、複数のAGVの運行を制御する。AGV08が作業ゾーンZ5aに到着すると、該無人搬送車の識別番号08に基づきワークの識別番号118を入手し、このワークの識別番号118に基づき該ワークの作業内容情報を入手し、その作業内容情報を該作業ゾーンZ5aの作業装置108aに送信する。
(もっと読む)
自走式機器およびそのプログラム
【課題】清掃後に機器本体のセンサのメンテナンスを自動的に行い、定期的なセンサのメンテナンスを不要とした自走式機器を提供することを目的とする。
【解決手段】機器本体100を移動させる移動手段102と、機器本体の走行をコントロールするコントロール手段101と、電力を供給する電池104と、機器本体の移動により走行する空間の清掃を行う清掃手段103と、清掃後にホームポジションへ移動した機器本体を自動的にメンテナンスする自動メンテナンス手段105を備えたものである。これによって、清掃後に機器本体100のセンサのメンテナンスをホームポジションにおいて自動的に行い、定期的なセンサのメンテナンスを不要としたものである。
(もっと読む)
遠隔監視システム
【課題】 監視員の確認負担を軽減した移動ロボットの遠隔監視システムの提供。
【解決手段】 監視区域の異常を検知する移動ロボットであって、 監視センタと通信する通信部と、監視区域の異常を自動復旧禁止異常か自動復旧禁止異常以外の異常かを識別可能に設定した設定情報および前記監視区域の現状態を記憶する記憶部と、異常を検知すると記憶部に異常状態を保持させる異常処理手段と、異常を検知すると監視センタに異常信号を送信する通信制御手段と、自動復旧モードを含む複数の動作モードを管理するモード設定手段と、動作モードが自動復旧モードであるときに、自動復旧禁止異常以外の異常が検知されると、当該異常信号の送信を禁止するとともに当該異常状態を解除するための復旧処理を実行する復旧処理手段とを備える。
(もっと読む)
物品を仕分けする方法および機器
【解決手段】 複数の仕分け先に物品を仕分けする方法および機器が提供される。前記物品は、複数の個別制御される送達車両の1つに載せられる。前記送達車両は、前記仕分け先へ当該送達車両を案内(誘導)する軌道を進み、前記仕分け先は前記軌道に沿って位置する。前記送達車両は、適切な仕分け先に到着すると、当該仕分け先に前記物品を排出し、送達すべき別の物品を受け取るため戻る。
(もっと読む)
移動体設備
【課題】移動体同士の衝突を簡素な構成により回避することができる移動体設備を提供すること。
【解決手段】複数の移動体3a,3bの夫々に、走行駆動手段SM1,AMP1,SM2,AMP2の駆動量を検出する駆動量検出手段RE1,RE2が設けられ、移動体同士の車間を監視する車間監視用制御手段Wが、移動体の夫々について、駆動量検出手段にて検出される駆動量情報C1,C2に基づいて得られる予測走行移動量と、走行位置検出手段DET1,DET2にて検出される走行位置情報D1,D2に基づいて得られる実走行移動量との対応関係により走行位置情報が適正であるか否かを判別し、適正であると判別された複数の移動体についての適正走行位置情報に基づいて、移動体同士の間隔が予め設定された許容間隔以上離れているか否かを判別し、移動体同士の間隔が許容間隔以上離れていないと判別した場合には、全ての移動体の走行を停止させるように構成されている移動体設備を構成した。
(もっと読む)
1 - 13 / 13
[ Back to top ]