
Fターム[5H301MM04]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 異常・故障検出、安全装置、試験、検査 (525) | 移動体自体の異常・故障に対するもの (318)
Fターム[5H301MM04]の下位に属するFターム
移動体上の制御装置に対するもの (208)
Fターム[5H301MM04]に分類される特許
1 - 20 / 110
ロボット掃除機及びその制御方法
【課題】補助掃除ユニットの誤作動を検出し、該検出結果に基づいてロボット掃除機の走行を制御し、補助掃除ユニットに誤作動が発生した場合にも隅部分を効率的に掃除できるロボット掃除機及びその制御方法を提供する。
【解決手段】このロボット掃除機は、前記ロボット掃除機の下部に突出及び収納可能に装着される補助掃除ユニット100と、前記補助掃除ユニットの突出、収納または回転状態を感知する感知部300と、前記感知部の感知結果に基づいて前記補助掃除ユニットが正常に動作するか否かを判断し、前記判断結果に基づいて前記ロボット掃除機の走行を制御する制御部200と、を備える。
(もっと読む)
走行車両

【課題】旋回後の進入位置合わせを行える自動走行制御機能を備えた農業用の走行車両を提供すること。
【解決手段】ステアリングハンドルに連動して正転と逆転をするステアリングシャフト15の切れ角を検出する切れ角センサ49と該シャフト15に回転駆動力を伝達するための正逆転モータ20とモータ20の回転駆動力をシャフト15に伝達するための電磁クラッチ22を有する連動機構を備えた自動操舵装置25とカメラ53で圃場内の遠目標X及び/又は作業軌跡Tを検出してモニタ47に表示可能とし、自動スイッチの「入」操作時時に、前記切れ角センサ49が所定量のシャフト切れ角を検出して車両の旋回が行われたと判断されると、モニタ47で表示される旋回後の遠目標Xの位置情報及び/又は作業軌跡Tの位置情報に基づき自動操舵装置25のモータ20を作動させて圃場内で直進走行の自動操舵を行う制御構成を有する制御装置100を備えた走行車両である。
(もっと読む)
搬送車
【課題】荷物の移送効率を低下させることなく載置された荷物が搬送中の荷物が搬送車から落下することを防止することのできる搬送車を提供する。
【解決手段】搬送車100の載置部102は、搬送対象である荷物が載置される部分であって、載置部102の側方に配置され載置部102からの荷物の落下を防止する落下防止体103と、載置部102の側方に配置される出現位置と本体部101側に配置される待避位置との間で落下防止体103を転換する転換手段104とを備える。
(もっと読む)
移動型ロボットシステム
【課題】 自律移動や自律作業が可能な移動型ロボットにおいて、充電による可動範囲の制限や作業内容の制限を受けずに、作業を継続可能な技術を提供する。
【解決手段】 移動して所定の作業を自律的に実行する移動型メインロボット(10A)と、その移動型メインロボット(10A)に対して装着可能であるとともに移動型メインロボット(10A)とは別に移動可能な移動型サブロボット(20A,20B,20C,20D)と、その移動型サブロボット(20C)に対して充電を実行する充電装置(30)とを備える。移動型メインロボット(10A)は、電気エネルギを供給するメインバッテリ(11)を備える。前記移動型サブロボットは、前記の移動型メインロボット(10A)に装着された場合に前記メインバッテリ(11)へ電気エネルギを充電する内蔵バッテリを備える。移動型メインロボット(10A)に装着されていない場合であって内蔵バッテリの電気エネルギが少ない場合には、充電装置(30)へ自律移動して充電する。
(もっと読む)
搬送車システム
【課題】 搬送車に効率的に充電できるシステムを提供する。
【構成】 蓄電部材を電源として走行する複数台の搬送車を、所定の走行経路に沿って、地上側コントローラの制御下に走行させる。走行経路は搬送車の蓄電部材への充電設備を備えた充電エリアを備え、搬送車は位置と蓄電部材の残容量とを地上側コントローラへ報告する。地上側コントローラは、蓄電部材の残容量が閾値以下の搬送車を充電エリアへ走行させて、蓄電部材に充電させると共に、搬送要求に応じて充電エリア内の搬送車を充電エリア外の位置へ走行させる。
(もっと読む)
自律走行体移動システム
【課題】送信出力が高い信号を用いることなく、エレベータと自律走行体とを連携して動作させる自律走行体移動システムを提供する。
【解決手段】自律走行体移動システム1は、自律走行体40とエレベータ制御装置21と第1中継装置22と第2中継装置32とを備える。エレベータ制御装置21は、自律走行体40の信号に基づいてエレベータを制御する。第1中継装置22は、自律走行体40がエレベータ籠31の外部に位置するときに当該自律走行体40と無線による信号の送受信を行い、自律走行体40とエレベータ制御装置21との間で送受信される信号を中継する。第2中継装置32は、自律走行体40がエレベータ籠31の内部に位置するときに、当該自律走行体40と無線による信号の送受信を行う。第2中継装置32は、更に、第1中継装置22と有線による信号の送受信を行い、自律走行体40とエレベータ制御装置21との間で送受信される信号を中継する。
(もっと読む)
自律走行体移動システム
【課題】他の通信端末からの発呼があっても機能を維持可能な自律走行体移動システムを提供する。
【解決手段】自律走行体移動システムは、自律走行体と、エレベータ制御装置と、第1中継装置と、を備える。自律走行体は、エレベータが設置された建物において、エレベータ籠に乗降して目的階に移動可能である。エレベータ制御装置は、自律走行体から受信した信号に基づいてエレベータを制御可能である。第1中継装置は、自律走行体とエレベータ制御装置との間で送受信される信号を中継しており、通信端末との接続が確立された時点から予め設定した時間内に特定の信号を受信できない場合に、当該接続を切断する。
(もっと読む)
無人搬送車
【課題】光軸調整を容易に行うこと。
【解決手段】複数の反射部17a〜17eを左右方向に段状に配置してなる検査用の反射板17に対して発光させる。そして、反射光を受光することにより、何れの反射部17a〜17eからの反射光であるかを特定する。そして、その結果を、発光部の光軸を調整するための指標となる光軸調整情報として表示部16aに表示させる。表示部16aには、反射した反射部17a〜17eに対応するシンボルHa〜Heが点灯した状態で表示されるので、その表示内容から光軸調整の有無及び調整量を認識できる。
(もっと読む)
自動車の運転者をサポートするための方法
本発明は、操車時に自動車の運転者をサポートするための方法に関する。はじめに自動車の周辺を検出し(3)、当該検出された周辺に基づいて、操車を行うための少なくとも1つの適切な軌道を計算し、操車を行うために自動車を自動的に制御する(5)。障害時には、自動車制御が終了したことを運転者に知らせ(11)、運転者は指示を得て、この指示に基づいて操車を続ける。 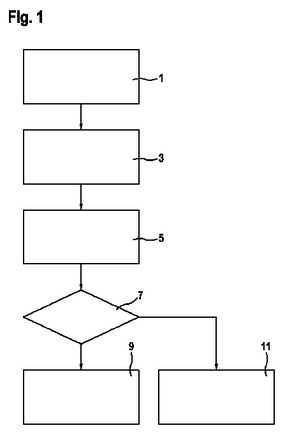 (もっと読む)
(もっと読む)
搬送装置の制御装置
【課題】搬送装置を構成する複数の搬送台車の走行を協調させて制御する。
【解決手段】一対の車輪をそれぞれ駆動する一対のモータを有してなる搬送台車を、前後左右に複数並べて配置して重量物を搬送する搬送装置の制御装置を、各搬送台車を制御する複数の子コントローラと、各子コントローラを統括制御する親コントローラにより構成し、親コントローラは搬送装置の原点座標と各搬送台車の台車座標を記憶しておき、旋回走行等の制御モード指令に応答して、各搬送台車の操舵角を演算して操舵角指令値及び各搬送台車の台車座標における速度指令値を演算して子コントローラに出力し、子コントローラは操舵角指令値に基づいて自己の一対の車輪を互いに正逆方向に回転させて操舵角を制御し、速度指令値に基づいてそれぞれ自己の一対の車輪の回転速度をそれぞれ制御することを特徴とする。
(もっと読む)
自律移動システム及び自律移動装置
【課題】自律移動装置が指定された経路から逸れることが無い移動計画を行うことができる自律移動システム及び自律移動装置を提供する。
【解決手段】管理装置は、通信装置37を介して各自律移動装置2a、2bから受信する集約データに基づいて、地図上の位置座標と、自律移動装置2a、2bで推定される自己位置が不確かになる程度を判断する誤差分布データとを対応付けて登録する誤差登録地図を管理する地図管理部310と、この地図管理部310で管理される誤差登録地図310cに基づいて、各自律移動装置2a、2bが経路から逸れることが無い又は逸れる確率を低くする、動作及び/又は経路を指定する移動計画を行う運用管理部320を備える。
(もっと読む)
倒立型移動体及び移動体の倒立制御方法
【課題】安定して倒立走行することができる倒立型移動体及び移動体の倒立制御方法を提供すること。
【解決手段】倒立型移動体1は、2以上の車輪を有するモータ駆動部2と、モータ駆動部2の状態を検出するセンサ部3と、センサ部3の検出結果に基づき倒立開始の許否を決定するロボット統括部4と、倒立走行を行うためにモータ駆動部2を制御する倒立制御演算部6とを有する。ロボット統括部4、移動体の重心位置が許容範囲内にある場合にのみ倒立開始を許可する。
(もっと読む)
電池式移動装置
【課題】電池式移動装置において、簡単な構成により、電池交換のために要する時間の短縮と装置の稼働率向上をを可能とする。
【解決手段】移動装置1は、複数の電池BTを搭載する電池搭載部11と、搭載された電池BTのいずれか1つを動力源として装置本体10を移動させる走行部12と、現在使用中の電池BTから他の電池BTに切り替えるタイミングを判定する電池切替判定部14と、次に用いる電池BTを選定する電池切替制御部15と、選定結果に基づいて動力源を次の電池BTに切り替える接続切替部16と、電池BTの切り替えが行われた時、使用済みの電池BTを充電済みの電池BTと交換するために、外部に電池交換要求を出す電池交換要求部17と、を備えている。電池交換要求によって電池を持ってきてもらい、交換させるので、電池交換中においても移動装置1の本来の作業を中断することなく続行できる。
(もっと読む)
搬送システムにおける制御方法
【課題】搬送台車の原動機の異常が発生しても、異常の状態に応じて走行可能かどうかの判断を自動的に行い、搬送台車の停止による搬送システム全体の停止時間を短縮する。
【解決手段】搬送台車がモータの異常で停止した場合に、搬送台車は、現状走行可能かどうか判断する(S5)。現状走行可能であると判断すると、搬送システムを再稼動させる(S8)。走行が不可能と判断すると、加速度および速度の少なくとも一方を下げた状態で走行可能かどうか判断する(S6)。走行不可能と判断すると、片輪での駆動で走行可能かどうか判断する(S7)。低加速度・低速度走行判断又は、片輪走行可否判断で走行可能と判断した場合には、搬送システムを自動で再稼動させる(S14、S16)。
(もっと読む)
移動機器
【課題】積載部に対して水平方向に働く力がつりあう方向に積載部を揺動させることで被搬送物を積載部に対して相対的に停止したままに保つ移動機器を提供する。
【解決手段】台車20と、台車20を支持する同軸一対の車輪30aと、車輪30aを倒立振子制御により回転駆動する車輪用アクチュエータ22aと、台車20の上方に設けられた積載部70と、台車20と積載部70との間に介在し、第1軸41回りに台車20に対して積載部70を揺動させる第1揺動機構40、及び、第2軸61回りに台車20に対して積載部70を揺動させる第2揺動機構60を備える揺動部と、積載部70における互いに直交する三方向への加速度を測定する加速度検知手段56と、加速度検知手段56により得られる加速度に基づいて、第1揺動機構40及び前記第2揺動機構60の揺動角を制御し、積載部70に対して水平方向に働く加速度の分力と重力の分力とがつりあう方向に積載部70を揺動させる揺動角制御装置82とを有する。
(もっと読む)
自律移動装置
【課題】自律移動装置において、簡単な構成により、自律移動装置の異常状態、特に周囲の障害物位置情報を取得するためのセンサに関連する異常状態を容易かつ低コストで検出可能とする。
【解決手段】障害物位置情報を取得する2つの環境情報取得手段21,22と、自己位置取得手段と、障害物位置情報、自己位置情報、地図情報、および制御パラメータに基づいて生成される走行経路に沿って自己の位置を移動させる移動制御手段とを備え、地図情報は環境に固定された障害物であって環境情報取得手段21,22によって検出される障害物の位置情報を含み、一方の、例えば、環境情報取得手段21によって検出された障害物Mの位置が地図情報に含まれる障害物の位置にあるにも関わらず、他方の環境情報取得手段22によって検出された障害物の位置が地図情報における障害物の位置とは異なる場合に自律移動装置1が異常状態にあると判断する異常判断手段を備える。
(もっと読む)
自律移動装置における検出機能検査方法
【課題】比較的狭いスペースであっても、自律移動装置に搭載されている複数の検出手段の検査を行うことができ、検出手段の高精度な検査を容易且つ迅速に行うことができる自律移動装置における検出機能検査方法を提供する。
【解決手段】自律的に移動自在で複数の検出手段が搭載された自律移動装置Rを基準位置1に位置させて、基準位置1の自律移動装置1と被検出体Tとを所定距離を存して対峙させる位置合せ工程を行う。次いで、自律移動装置Rをその移動機構により基準位置1で自転させ、自律移動装置Rの向きを予め設定した複数の方向に順次向ける自転工程を行う。続いて、自律移動装置Rが向いた各方向毎で被検出体Tを検出させる検出処理工程を行う。そして、各検出手段毎に良否を判定する判定工程を行う。
(もっと読む)
搬送台車システム及び搬送台車への走行経路の指示方法
【構成】 搬送台車の走行ルートを構成する、互いに連結された複数のセグメントから、搬送台車を実際に走行させる経路を構成する複数のセグメントをオペレータがマニュアルで指定することを受け付け、指定された複数のセグメントに従って、走行指令を作成し、走行指令に従って搬送台車を走行させる。
【効果】 マニュアルでの走行経路の指定が容易になる。
(もっと読む)
移動体の位置表示システム
【課題】無人搬送車の位置表示システムにおいて、無人搬送車の正確な位置を認識でき、尚且つ、走行ルート全体を表示できる技術を提供する。
【解決手段】走行ルート1に沿って走行する無人搬送車2の位置を表示するディスプレイ17を備えたシステムおいて、走行ルート1に位置情報ポイントPを設定する。位置情報ポイントPは走行ルート1の始点3から終点4までの全距離に対する始点3から位置情報ポイントPまでの距離の百分率を位置情報Qとして設定する。設定した位置情報ポイントP間の特定の走行ルート1を拡大し、他の特定の走行ルート1を縮小して表示移動経路として表示する。地上制御盤10は、無人搬送車2からの情報を基に走行ルート1の始点3から終点4までの距離に対する始点3から無人搬送車2までの距離の百分率を移動体位置情報Aとして換算する。この移動体位置情報Aを基に表示移動経路上に無人搬送車2の位置を表示移動経路上に表示する。
(もっと読む)
搬送システム及び搬送車
【課題】例えば半導体装置製造用の各種基板等が収容された容器等の被搬送物を、合流箇所を含む軌道上で搬送する搬送システムにおいて、搬送車同士の衝突を防止しつつ、搬送車を効率良く稼働する。
【解決手段】搬送システム(100)は、軌道(1)と、複数の搬送車(3)と、軌道上における合流箇所を含む所定範囲内へ、複数の搬送車のうち一の搬送車が軌道の一部を介して進入した場合に、所定範囲内へ、複数の搬送車のうち他の搬送車が軌道の他部を介して進入することを禁止する旨の進入禁止信号を出力する進入制御手段(7,9)とを備える。進入制御手段は、進入禁止信号が出力されている際に前記一の搬送車で停止を伴う故障が発生した場合に、一の搬送車の停止位置を基準として他の搬送車が一の搬送車に衝突するか否かを判定し、他の搬送車が衝突しないと判定されると、進入禁止信号を解除する。
(もっと読む)
1 - 20 / 110
[ Back to top ]