
Fターム[5H301QQ06]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 特殊な動作をする移動体 (317) | ナビゲーション (39)
Fターム[5H301QQ06]に分類される特許
1 - 20 / 39
走行装置
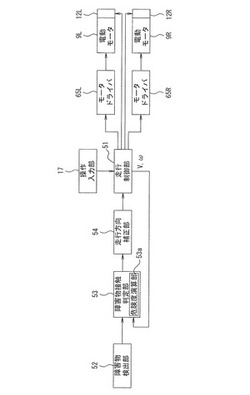
【課題】自律歩行が困難な歩行者を安全に先導することができる歩行支援装置を提供する。
【解決手段】移動方向を入力する操作入力部17を有するとともに、走行部を有して任意の方向に走行可能な自走体2と、前記操作入力部で入力された移動方向に基づいて前記自走体の走行を制御する走行制御手段51と、前記自走体の周囲の障害物の位置を検出する障害物検出手段52と、前記障害物検出手段で検出した障害物の位置情報と前記走行制御手段の指令値とに基づいて自走体の前記障害物への接触の有無を判定する障害物接触判定手段53と、該障害物接触判定手段の判定結果に基づいて前記走行制御手段の走行方向を補正する走行方向補正手段54とを備えている。
(もっと読む)
車両および車両制御プログラム

【課題】搭乗者の進行したい方向を正確に汲み取りながら走行予定軌道を選択して自動走行を行うことができる車両および車両制御プログラムを提供すること。
【解決手段】第3車両位置予測処理(S107)によって、ステアリングホイール13の回転角速度Δδを取得してステアリングホイール13の操舵角を算出し、そのステアリングホイール13の操舵角から前輪2FL,2FRへ付与される操舵角を算出して、その前輪2FL,2FRへ付与される操舵角と車両速度とに基づいて車両1のヨーレートを推定し、その推定したヨーレートから所定時間後の車両位置を予測する。これにより、搭乗者の進行したい方向を、所定時間後の車両位置まで特定して把握しているので、予測された車両位置に基づいて走行軌道を選択することによって、搭乗者の進行した方向を正確に汲み取りながら走行予定軌道を選択して、自動走行を行うことができる。
(もっと読む)
自律カバレッジロボットナビゲーションシステム
【課題】ナビゲーションビーコンにより自律モバイルロボットを隣接する有界領域に移動可能とする。
【解決手段】ナビゲーションビーコンは、第1の有界領域と、隣接する第2の有界領域との間のゲートウェイ内に配置されたナビゲーションビーコンによって、ゲートウェイマーキングエミッションを伝送するように構成されたゲートウェイビーコンエミッタを有し、自律カバレッジロボットは、ビーコンエミッションに応答するビーコンエミッションセンサ(104、106)と、ゲートウェイマーキングエミッションの検出に応えてロボットの方向を変える清掃モードで、ロボットを第1の有界領域周辺にて動かすように構成された駆動システムとを含み、駆動システムは、マイグレーションモードにおいて、ゲートウェイを通って第2の有界領域へとロボットを動かす。
(もっと読む)
走行軌道作成装置
【課題】自動走行時、走行環境に合わせて進路を柔軟に変化させつつ、進路変化前後で連続性・一貫性を保持することで交通秩序の乱れを抑制することができる走行軌道作成装置を提供する。
【解決手段】走行軌道作成装置11は、環境情報、他車両情報、自車情報も取得するとともに自車両の位置を同定するセンサ部12と、センサ部12から出力された情報に基づいて自車両の運行計画を立案し、この運行計画に基づいて1又は複数の定型進路を生成する定型進路生成部13と、自車両が行動可能な進路案を1又は複数生成する進路生成部14と、定型進路生成部13から出力された定型進路と、進路生成部14から出力された進路案とに基づいて、自車両の進路を選択する進路選択部15と、進路選択部15から出力された進路に基づいて、自車両を駆動制御する駆動部16と、を備える。
(もっと読む)
向き計測装置、向き計測システム、向き計測方法、及び向き計測プログラム
【課題】移動装置が、自装置の方向を正確に測定できること。
【解決手段】位置積分部1162は、位置の変化量を積分して移動ロボット1の位置を示す推定位置情報を推定する。方向積分部1161は、方向の変化量を積分して移動装置の方向を示す推定方向情報を推定する。位置補正部1163は、絶対位置測定装置から受信した位置情報であって時々刻々の移動ロボット1の位置を示す絶対位置情報と、時々刻々の推定位置情報と、を同定して、方向のずれを補正する方向補正値を算出する。方向補正部1164は、方向補正値を用いて、推定方向情報が示す方向を補正する。
(もっと読む)
自律走行ロボットを利用した地図生成方法、これを利用した最適走行経路算出方法およびこれらを遂行するロボット制御装置
【課題】本発明は自律走行ロボットを利用した空間地図生成方法を提供する。
【解決手段】本発明に係る地図生成方法は、空間に配置された複数の位置座標系の各々から出力されたロボットローカル座標からロボットグローバル座標を計算するステップ、および計算されたロボットグローバル座標に基づいて空間における複数の位置座標系各々の位置を推定し、推定された複数の位置座標系各々の位置に基づいて空間地図を生成するステップを含む。
(もっと読む)
ランドマーク識別のための自動標識付け
【課題】画像においてランドマークを識別する方法を提供する。
【解決手段】作業現場の画像を受け取り、この画像において示唆された作業現場の特徴の識別を判定するために画像を分析する。作業現場の特徴の示唆された識別を、通信ユニットを通じて送る。確認された識別を形成するために、作業現場の特徴の示唆された識別を受け取る。確認された識別、およびこの確認された識別と関連のある複数の属性を、データベースに格納する。
(もっと読む)
外殻ロボット駆動システム
外殻ロボットは、ロボット本体と、外殻の周囲でロボットを移動させるための少なくとも一つの駆動モジュールと、搭載型動力源と、この搭載型動力源から動力の供給を受ける駆動モジュール用の動力サブシステムとを含む。複数の永久磁石要素が、駆動モジュールと関連付けられており、かつ、それぞれ、外殻に隣接したときの非短絡状態と、外殻に隣接していないときの短絡状態との間で切り換え可能となっている。 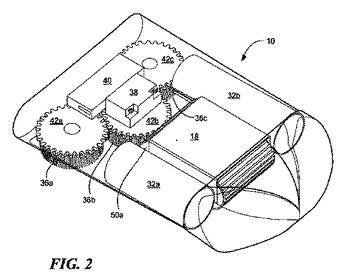 (もっと読む)
(もっと読む)
ロボット、制御プログラム、及び記録媒体
【課題】歩行者に対して確実に障害物を回避可能な進路を提示することのできるロボットを提供する。
【解決手段】ロボット1は、後方の範囲Aに向けて所定角度ピッチで放射線状にレーザ光を照射して、各レーザ光毎にロボット1から反射点(h1〜h17)までの距離データを獲得する。そして距離データに基づき、ロボット1の後方に存在する物体の各々の表面に生じた反射点のクラスタ1〜4を抽出し、この中から歩行者の両足を示す可能性のある2つのクラスタの組(1,2の組、2,3の組)を特定する。そして、特定したクラスタの組毎に、歩行者の胴体中心位置を示す可能性のある座標T1,T2を獲得し、この中から、過去のデータから推定される胴体中心位置S1と、最も近い位置にある座標T2を、現在の胴体中心位置の座標として特定して、座標T2に基づき、ロボット1の速度を制御する。
(もっと読む)
2次元図形マッチング方法
【課題】逐次性を有する高速な2次元図形マッチング方法を提供することを目的とする。
【解決手段】入力地図および参照地図に新たな点を挿入し(S102,S108)、入力地図および参照地図の局所特徴を抽出し(S104,S110)、抽出された参照地図の局所特徴を記憶し(S112)、抽出された入力地図内の局所特徴の一つをクエリとし、類似する参照地図内の局所特徴を検索し(S114)、検索結果から解候補としての仮説を含む仮説集合を生成し(S116)、仮説集合に含まれる各仮説の確からしさを評価する(S118)。この際、参照地図の局所特徴のLSH関数によるハッシュ値に対応するビンに記憶し(S112)、クエリに関する局所特徴のLSH関数によるハッシュ値に対応するビンを検索し(S114)、点と仮説との対である点仮説ペアを評価する順序を計画し(S118a)、最良の仮説を選出する(S118b)。
(もっと読む)
誘導装置および誘導装置の制御方法
【課題】使用者の足底反力、関節角度の運動を直接計測し、誘導装置の制御に適用することで使用者の運動を妨げることなく、目的地まで安全に誘導できる誘導装置および誘導装置の制御方法を提供する。
【解決手段】回転車輪1を有する台車部2と、回転車輪1を駆動する駆動部12と、台車部2に取付けられたポール3と、使用者13の力操作を検出する力操作検出手段8と、障害物を検出する障害物検出手段6と、台車部2の位置を検出する位置検出手段7と、駆動部を制御する制御部11と、台車部2と使用者13との距離を計測する距離計測手段5と、使用者13がポール3の先端のグリップ部4を把持する力を計測する把持力計測手段9と、目的地を入力する目的地入力手段10と、を備えた誘導装置14において、使用者13の足底に足底反力を計測する足底反力計測手段15を備え、使用者13の股関節および膝関節に関節角度を計測する関節角度計測手段16を備える。
(もっと読む)
サービスロボットによって収集された時空間情報のリパーパシングを行うための方法
本明細書において実装されるロボットおよび方法は、時空間情報の能動的リパーパシングを実行する。ロボットは、情報を分析して、最初に情報が発生した一次サービス機能の有効性および効率を改善するように構成されうる。ロボットは、この情報を使用して施設の3次元(3D)モデルを作成するように構成され、環境のバーチャルツアーの作成、ビデオゲームへの環境のポーティングなどの多数の機能に使用することができる。ロボットは、この情報を利用して、次のカタログを使用して選択された物体を後で特定できるように施設内の物体を認識し、分類するか、または施設効果の保険証書に必要とされるようなすべての項目の大域的カタログを作成するように構成されうる。  (もっと読む)
(もっと読む)
移動体、移動体システム、及びその故障診断方法
【課題】確実に発信機の故障を検出することができる移動体、移動体システム、及び故障診断方法を提供すること。
【解決手段】本発明の一態様にかかる移動体は、環境中に設けられた発信機161から発信された信号に基づいて移動する移動体であって、発信機161から発信された識別情報を含む信号を受信する受信機126と、位置を推定する自己位置推定部111と、地図上での発信機161の位置情報を参照して、推定位置が発信機161からの識別情報を取得可能な取得可能領域にあるか否かを判定する判定部112と、推定位置が取得可能領域にある場合に、受信機126が識別情報を取得できたか否かに応じてカウント動作を行う故障カウンタ113と、故障カウンタ113のカウント値に基づいて発信機161の故障を診断する診断部114と、を備えるものである。
(もっと読む)
ペット誘導ロボットおよびペット誘導方法
【課題】人間が付き添うことなくペットの誘導を行うペット誘導ロボットを提供すること。
【解決手段】移動可能なロボット本体部11とペット装着部12およびリード13とからなるペット誘導ロボット10であって、周囲の情報を収集する外部情報収集手段21で得た情報から周囲状況を推定する外部環境認識手段22と、前記リードの張力と長さを収集するリード状態収集手段23と、前記外部環境認識手段22とリード状態収集手段23からペットの運動状況を推定するペット状況推定手段24と、ペットの目標経路を格納する経路情報記憶手段25と、周囲状況とペットの状況、経路情報記憶手段に格納された経路情報をもとに経路を決定する経路計画手段26と、前記経路計画手段の決定した経路に応じて駆動装置を駆動する駆動手段27と、前記周囲状況と前記ペットの状況に応じてリードの張力と長さを最適に調整するリード調整手段29とを備える。
(もっと読む)
自己位置同定装置を備えた移動体
【課題】対象とする環境が大規模であっても自己位置同定に必要なランドマーク情報の処理コストを軽減でき、なおかつ環境の変化に対しても柔軟に対応可能な移動体の自己位置同定装置を提供する。
【解決手段】局所地図と大域地図とを備え、ランドマーク候補およびランドマーク照合結果を局所地図に保存して次回のランドマーク照合に利用する構成とした。更に、照合にあたって対応するランドマークがないランドマーク候補を新たにランドマークとして登録する一方、既に登録されているランドマークであっても長期間にわたって観測されないものは削除するようにした。
(もっと読む)
買物経路誘導システム
【課題】 ショッピングセンタなどにおいて、ユーザを必要な場所まで誘導するカートロボットを用いたシステムを提供する。
【解決手段】
ユーザの買物経路を誘導するシステムであって、管理サーバは、商品棚位置情報、店舗内のカメラからの混雑情報、およびカートロボットの経路情報を格納し、各情報をカートロボットに送信し、カートロボットは、商品棚位置情報をもとに目的とする棚位置までの距離を最短とする経路計画を生成し、当該経路にしたがってカートを移動させ、曲がり角を検出したときに、ステアリング操作が自動的に行われることを特徴とする。
(もっと読む)
ナビゲーション装置とその制御方法
【課題】高価で複雑なセンサを用いることなく、輝度分布の変化が大きい屋外で適用でき、磁気テープや光学式テープなどを用いずに容易に経路変更ができるナビゲーション装置とその制御方法を提供する。
【解決手段】移動可能な自律移動体1に搭載されたナビゲーション装置10。自律移動体の移動方向の画像を一定時間間隔で撮影するカメラ12と、記憶装置と演算装置を有しカメラの画像に基づき自律移動体を制御する制御装置18とを備える。制御装置は、教示走行時において自律移動体が所定の走行経路を移動する際に所定のセンサ情報を記憶し、自律走行時において記憶したセンサ情報と現時点のセンサ情報とを比較して、自律移動体が前記走行経路を移動するように自律移動体を制御する。所定のセンサ情報は、少なくともカメラによる撮影画像と自律移動体に対するコマンドを含む。
(もっと読む)
実写基盤移動機器の制御方法、装置および媒体
【課題】 ユーザの制御機画面に現れる実写映像で移動機器を所望する位置に移動させることを提供する。
【解決手段】 遠隔制御機に備えられた映像入力手段によって移動機器を含む映像を獲得する映像獲得部と、獲得された映像を遠隔制御機に備えられた出力部に出力する映像出力部と、出力された映像から移動機器を認識して、遠隔制御機から移動機器の位置を検出する位置検出部と、ユーザによって前記出力部に移動機器が移動する地点が選択され、選択された地点の位置を実際空間上の位置に変換する移動位置検出部と、および前記選択された地点の実際空間上の位置に移動機器を移動させる移動制御部とを含む。
(もっと読む)
掃除機システムとそのプログラム
【課題】ほこりのある部分のみを掃除するようにし、掃除時間の短縮化と、無駄な消費電力を抑え、効率的な掃除が行える掃除機システムを提供することを目的とする。
【解決手段】掃除機200は掃除機側通信手段201を有し、掃除機とは別個に動作する移動体手段100は、ほこり、障害物、移動量を検出するセンサ手段103、掃除機と双方向で通信をする移動体側通信手段104、走行するための駆動手段102、これら各手段を制御する制御手段104、および電源105を有し、センサ手段103の検出結果に基づき移動体側通信手段104と掃除機側通信手段201間の通信信号により掃除機200を誘導するようにしたものである。これによって、移動体手段100が予め掃除をする場所を特定し、掃除機200を誘導するので、ほこりのある部分のみを掃除することになり、掃除時間の短縮化と、無駄な消費電力を抑え、効率的な掃除が行える。
(もっと読む)
自律マシン
【課題】改良された自律マシンを提供する。
【解決手段】自律マシンはそれが配置される領域を探査し、前記マシンが前記領域を探査する際に前記マシンによって収集された情報に基づいて前記領域のマップを構築する。前記マシンは自身が前記領域内の前に訪れたポジションに戻ってきたかどうかを特定する。前記マップは、前記マシンが前に訪れたポジションに戻る際、現在のポジションと前に訪れたポジションとが同一であるという知識に基づいて修正される。
(もっと読む)
1 - 20 / 39
[ Back to top ]