
Fターム[5H303AA20]の内容
Fターム[5H303AA20]に分類される特許
1 - 20 / 41
位置決め制御装置
【課題】精密測定装置に振動等が発生した場合に位置決め制御装置の制御ゲインを調整する際、その調整時間の短縮化、及び、ゲイン調整に掛かる労力の軽減化を図ること。
【解決手段】位置決め制御装置100は、位置補償部10、速度補償部20、電流補償部30、設定テーブル40及びゲイン選択手段50を有する。位置補償部10は目標位置及び検出位置の位置偏差を得て、これに基づき目標速度を制御する。速度補償部20は、目標速度及び検出速度の速度偏差を得て、これに比例ゲインKpを掛けた値及び速度偏差の積分に積分ゲインKiを掛けた値の加算値をモータの目標電流として出力する。電流補償部30は、目標電流及びモータの検出電流の電流偏差を得て、これに基づいて駆動電流を制御する。ゲインKp、Kiの設定値の組合せが複数通り設定テーブル40に記憶されており、選択手段50で選択された組合せに各ゲインが書き換えられるようになっている。
(もっと読む)
位置決め制御装置

【課題】位置決めの完了判定や現在位置の取得の高速化が可能な位置決め制御装置を提供する。
【解決手段】所定の位置制御周期で制御対象の現在位置情報をサンプリングし、目標位置情報と現在位置情報との位置偏差に基づいて制御対象の位置決め用の制御量を出力する位置制御部と、この位置制御部から出力された制御量に基づいて制御対象を駆動する駆動部とを備え、位置制御部は、過去から現在に至る複数回のサンプリングによって得られた現在位置情報を一時記憶するバッファと、バッファに記憶された複数の現在位置情報から所定の統計値を算出する演算処理部とを備える。
(もっと読む)
産業機械
【課題】 移動機構の位置に基づく信号を出力するリニアエンコーダの原点位置を検出する動作を不要にでき、短時間で測定を開始できる産業機械を提供する。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させるスピンドル2と、スピンドル2の位置を制御することにより制御対象物の位置を制御する制御装置3とを備えるものであって、スピンドル2の絶対位置を出力するアブソリュート型のリニアエンコーダ11を備える。このため、三次元測定機1による測定を短時間で開始できる。
(もっと読む)
産業機械
【課題】 制御装置の機種の増加を抑えることができてコスト増を防止できる産業機械を提供する。
【解決手段】 三次元測定機1は、複数の軸方向へ制御対象物を移動させる移動機構2と、移動機構2に接続されて移動機構2を各軸方向に制御する各軸の制御信号を送受信する第1ポート321と第2ポート322と第3ポート323とを有し、移動機構2を制御する制御装置3とを備えるものであって、制御装置3は、各軸の制御信号を生成する制御信号生成部324と、各ポート321〜323で送受信する各軸の制御信号をそれぞれ設定させる設定部325とを備える。
(もっと読む)
産業機械および産業機械の制御方法
【課題】 短時間で容易かつ確実に原点位置の検出ができる産業機械および産業機械の制御方法を提供する。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させるスピンドル2と、スピンドル2を移動させる駆動力を発生する駆動モータ3と、スピンドル2の位置を制御するとともに駆動モータ3の回転速度を制御する制御装置4とを備えるものであって、スピンドル2の位置に基づく信号を検出するインクリメンタル型のリニアエンコーダ11と、駆動モータ3の絶対角度に基づく信号を検出するアブソリュート型のロータリーエンコーダ12とを備える。
(もっと読む)
産業機械および産業機械の制御方法
【課題】 制御対象物を適切に制御できない場合であっても、制御対象物の移動を確実に停止できる産業機械および産業機械の制御方法を提供する。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させる移動機構2と、移動機構2を制御する制御装置3とを備えるものであって、制御装置3は、制御対象物の軸方向への移動を停止させる停止手段30を有し、停止手段30は、制御対象物の軸方向への移動速度を監視する速度監視部302と、制御対象物の軸方向への移動速度が所定の閾値を超えているか否かを判定する判定部303と、制御対象物の軸方向への移動速度が所定の閾値を超えている場合に、制御対象物の移動を停止させる停止部304とを備える。
(もっと読む)
位置決め制御装置及びその方法
【課題】処理対象物の特定箇所に処理部を位置決めさせることを、コストを抑制しつつ、より簡易的に実施可能な位置決め制御装置及びその方法を提供する。
【解決手段】位置決め制御装置のコントローラ17は、可動体8の検知部9が処理対象物を検知することにより出力されるセンサ信号及びサーボモータ15の駆動に用いられるパルス信号を受信する手段と、可動体8を処理対象物の横断方向に移動させてセンサ信号が出力される間におけるパルス信号に関する情報と処理対象物のタイプとの関係を定めたテーブルを用いて、処理対象物のタイプを特定する手段と、特定した処理対象物のタイプに基づき、処理対象物のタイプと被処理部の位置との関係を定めたテーブルを用いて、処理対象物の被処理部の位置を特定する手段と、当該特定に基づくパルス列を生成してモータドライバ16に送信する手段とを有することを特徴とする。
(もっと読む)
並列スライダ装置の制御装置および制御方法および測定装置
【課題】並列スライダ装置において、二つのスライダが相互に干渉することなくスムーズな動きをもって移動することを実現すること。
【解決手段】
前側リニアサーボモータ72のための前側サーボコントローラ110と後側リニアサーボモータ80のための後側サーボコントローラ130とに互いに同一の位置指令を与える一方で、前側リニアサーボモータ72は比例要素と少なくとも積分要素と微分要素の何れか一方を含むPI制御あるいはPD制御あるいはPID制御を行い、後側サーボコントローラ130は比例要素のみを含むP制御を行い、前側サーボコントローラ110と後側サーボコントローラ130とで制御ゲインを互いに相違させる。
(もっと読む)
情報処理装置、位置制御方法、プログラムおよび記録媒体
【課題】 ポインティング・デバイスを用いて、顕微鏡システムにおけるステージなどの操作対象を位置制御する情報処理装置、位置制御方法、プログラムおよび記録媒体を提供すること。
【解決手段】 本発明の情報処理装置110は、ポインティング・デバイス114により指し示される操作画面上の座標値を取得する手段172と、この座標値から操作対象の位置の目標値を算出する手段174と、操作対象の位置の目標値と現在値との差分を算出する手段176と、座標値の取得時間間隔内に操作対象を差分だけ移動させるために必要な速度から、予め設定された平滑化係数に応じて減速した値として、操作対象を駆動する同期モータのパルススピードの目標値を算出する手段180と、差分が有り、かつ、順方向の駆動信号が出力されている場合に、算出されたパルススピードの目標値を設定し、このパルススピードの目標値に向けた加減速制御を指令する手段184とを含む。
(もっと読む)
平面3自由度ステージ
本発明は、平面3自由度ステージに関するもので、並進2自由度を有する並進運動機構部と、並進運動機構部と独立的に運動する回転1自由度を有する回転運動機構部と、並進運動機構部と回転運動機構部が設置され、内側の固定部及び外側の駆動部を備えるステージベースを含むことを特徴とし、これによると、並進運動と回転運動が独立的に行われるので、運動誤差を減少させることができ、制御及び設計を容易にすることができる。 (もっと読む)
内視鏡型の操縦可能な構造体
非破壊検査用の可撓かつ操縦可能な構造体(20、32)であって、細長い本体(26)と、細長い本体(26)の少なくとも一部分の曲率を変化させることができる少なくとも1つのアクチュエータ(28、34)とを備えており、アクチュエータ(28、34)が、細長い本体(26)に組み合わせられた支持体(22)によって保持され、支持体(22)は、細長い本体(26)から離れており、または離すことができる遠位部(24、36)を有しており、遠位部(24、36)が、引っ張り線(30)によって細長い本体(26)の一部分に接続されている構造体。 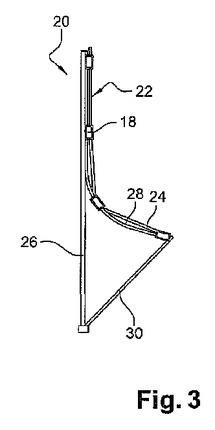 (もっと読む)
(もっと読む)
位置決め装置
【課題】従来の位置決め制御装置に比べて位置決めステージの位置と制御装置の位置が遠く離れておりノイズが発生しやすい劣悪な環境下においてもノイズの影響を受けない安定な位置決めが可能な位置決め装置を提供する。
【解決手段】デジタル出力の位置センサが検出した位置決めステージが位置する現在値と1回前の制御サイクルにおいてデジタル出力の位置センサが検出した位置決めステージが位置した前回値との差が設定値以内の場合は位置決め演算に現在値を採用し、設定値より大きい場合は位置決め演算に前回値を採用する。
(もっと読む)
ステージ装置およびその制御方法
【課題】試料と副ステージを確実に密着させても、試料を破損する危険の少ないステージ装置の制御方法を提供する。
【解決手段】試料9を載置する主基台1と、主基台1に対向配置された副基台7と、副基台7上のアクチュエータ6と、副基台7からバネで吊り下げられるアクチュエータ6によって制御される副ステージ8と、副基台7と前記副ステージ8との間の距離を計測する距離センサとを備え、試料9の厚さ方向の公差を接触時最大位置決め誤差と定義したとき、アクチュエータ6の各出力推力制限値FL[p]を、予め求めた試料が存在しない場合の各出力推力に試料9が許容する押し当て力を加えた値とするステップと、副ステージ8の位置許容偏差を副ステージ8に設定された位置許容偏差に接触時最大置決め誤差を加えた値とするステップ等の5ステップより試料9にアクチュエータ6が接触したと判断する。
(もっと読む)
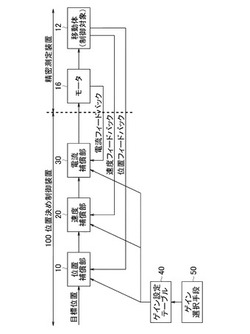
移動体画像追尾装置および方法
【課題】追尾性能を改善する。
【解決手段】天頂から一定の距離よりも離れた第1範囲に移動体がある場合には、角度と追尾誤差検出値とを使用して、移動体を追尾するように第1回転手段および第2回転手段を駆動する第1角速度指令値を計算する第1計算手段と、天頂から一定の距離以内の第2範囲に移動体がある場合には、角度と追尾誤差検出値とを使用して、移動体の移動方向を推定する推定手段と、角度と追尾誤差検出値と移動方向とを使用して、天頂特異点を回避しながら移動体を追尾するように第1回転手段および第2回転手段を駆動する第2角速度指令値を計算する第2計算手段と、第1範囲に移動体がある場合には第1角速度指令値と角速度との差がなくなるように、移動体が第2範囲にある場合には第2角速度指令値と角速度との差がなくなるように、第1回転手段および第2回転手段を駆動制御する制御手段と、を具備することを特徴とする。
(もっと読む)
位置決め制御ユニット、位置決め制御方法および位置決め制御プログラム
【課題】位置決め過程の位置精度を向上させる位置決め制御ユニット、位置決め制御方法および位置決め制御プログラムを提供する。
【解決手段】位置決め制御ユニット100は、特定の位置決め速度に基づいて1制御周期あたりの操作量を算出する操作量算出部121と、算出された操作量を出力する出力制御部123と、出力された操作量をデジタル信号からアナログ信号へ変換するD/A変換部124と、を備え、アナログ信号により圧電素子を駆動させ、位置検出を伴う閉ループでステージの位置決めを制御する。1制御周期あたりの操作量を制御することで、位置決め動作による振動を抑制することができる。その結果、位置決めの精度を向上させることができる。
(もっと読む)
傾動装置
【課題】傾動台の中心を傾動中心とすることが可能であり、しかも傾装置を大型化させずに傾動台の傾動角度を大きくすることができる。
【解決手段】傾動装置1は、基台3に対して傾動台2を傾動可能に支持する傾動台支持部4と、基台3の上面3aに対して略平行となる方向に延在し、その延在方向に伸縮可能な一対の圧電素子5と、各圧電素子5の伸縮による第1の変位を自身の変形により基台3の上面3aに略直交する方向に拡大させるとともに、この拡大による第2の変位を傾動台2に伝えるV溝部66を有する変位拡大部材6とを備えている。傾動台支持部4は、支柱41と、支柱41に対して第1軸線を中心にして回転可能に支持された回動リングとを有し、傾動台2が回動リングに対して第2軸線を中心にして回転可能に支持される構成とした。
(もっと読む)
長尺重量物のアライメント支援方法、長尺重量物のアライメント支援システム
【課題】長尺重量物のアライメント容易に行うことが可能な長尺重量物の位置合せ支援方法、およびアライメント支援システムを提供する。
【解決手段】建屋座標系Oで目標位置が定められた長尺重量物のアライメント支援システムであって、前記長尺重量物である電磁石12に固定され、前記目標位置が設定された計測用ターゲット26と、前記電磁石12に配設され、前記長尺重量物を所定の調整軸方向に移動させてアライメントを行う調整機構14と、前記計測用ターゲット26の現在位置を測定して現在位置のデータを出力する計測装置16と、前記現在位置のデータが入力され、前記現在位置のデータと前記目標位置のデータとの偏差を前記計測用ターゲットによって形成される平面を基準として構成された座標軸によるローカル座標系Lに変換する演算手段18と、を有してなる。
(もっと読む)
産業機械
【課題】目標位置の変化速度、及び補正に起因する追従誤差を抑制することができる制御装置を備える産業機械の提供。
【解決手段】三次元測定機1は、被測定物を測定するための測定子を移動させる移動機構2と、移動機構2を制御することで測定子の位置を位置指令値に追従させる制御装置3とを備える。制御装置3は、移動機構2にて移動される測定子の位置を検出する位置検出部31と、位置検出部31による検出位置を補正する補正部32と、補正部32にて補正された検出位置の位置指令値に対する偏差に基づいて、測定子の位置を制御する位置制御部33と、位値指令値に基づいて、移動機構2をフィードフォワード制御する位置フィードフォワード制御部34と、補正部32による検出位置の補正量に基づいて、移動機構2をフィードフォワード制御する補正量フィードフォワード制御部35とを備える。
(もっと読む)
搬送制御装置、搬送装置の制御方法、及び観察装置
【課題】駆動機構の搬送量誤差と原点センサーの位置検出誤差を個別に加味した制御動作を実行する搬送制御装置を提供する。
【解決手段】本発明に係る搬送制御装置は、往復移動体を駆動する駆動機構と、原点センサー5と、駆動機構2の駆動量を検出する駆動量検出手段と、往復移動体が静止状態から移動状態に移行した時点を光学的に検知する移動検知手段とを具え、原点センサー5が第1出力状態から第2出力状態となるまで往復移動体を一方向に移動させた後、原点センサー5が第2出力状態から第1出力状態となるまで往復移動体を逆方向に移動させ、原点センサー5が第2出力状態となった後に往復移動体が静止状態から移動状態へ移行するまでの第1の駆動量と、往復移動体が移動状態へ移行した後に原点センサーが第1出力状態となるまでの第2の駆動量とを取得する。
(もっと読む)
位置決め装置および制御方法
【課題】静止安定性を有する位置決め装置。
【解決手段】対象物を移動させる駆動力を発生する駆動部と、対象物を目標位置に向かって移動させるべく駆動部をサーボ制御する制御部と、対象物を、駆動力よりも大きな固定力で固定する固定部とを備え、移動した対象物が目標位置に到達した後、少なくとも固定部が対象物を固定するまで、制御部は、対象物が移動していた期間のサーボゲインよりも小さなサーボゲインでサーボ制御を継続する。上記位置決め装置において、浮上力を発生させて対象物を浮上させる浮上力発生部を更に備え、浮上力発生部が浮上力の発生を停止した後、少なくとも少なくとも固定部が対象物を固定するまで、制御部は、力発生部が対象物を浮上させていた期間のサーボゲインよりも小さなサーボゲインでサーボ制御を継続してもよい。
(もっと読む)
1 - 20 / 41
[ Back to top ]