
Fターム[5H303CC10]の内容
Fターム[5H303CC10]に分類される特許
1 - 20 / 58
移動制御装置及び移動制御方法、並びにコンピューター・プログラム
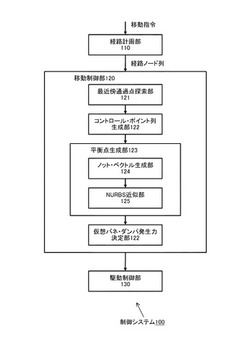
【課題】マニピュレーターのリーチング動作や移動ロボットの移動など、自動機械の移動を好適に制御する。
【解決手段】自動機械の現在位置及び最終目標位置をパラメトリック曲線の端末とみなし、これら2点を結ぶパラメトリック曲線を内分比r:1−rで内分する内分点を、仮想バネ・ダンパ系の平衡点、すなわち仮目標位置として算出する。そして、この仮目標位置を2次のフィルターで鈍らせ、目標位置xdの生成を行なう。複雑な経路への追従制御が実現されるとともに、ベースとなるオンライン目標位置整形の特徴である対外乱適応能力を両立した移動制御器を構成できる。
(もっと読む)
媒体搬送装置

【課題】コストの増大を招くことなく、複数の制御部による同期制御を実現する媒体搬送装置を提供する。
【解決手段】媒体搬送を行う媒体搬送装置に、媒体を搬送する第1搬送手段606と、第1搬送手段を制御する第1下層制御手段602と、第1搬送手段により搬送された媒体を受け取り、受け取った媒体を搬送する第2搬送手段609と、第2搬送手段を制御する第2下層制御手段605と、第1下層制御手段および第2下層制御手段を統括的に制御する上層制御手段601と、第1下層制御手段および第2下層制御手段に接続された媒体検知手段256とを設け、第1下層制御手段および第2下層制御手段は、媒体検知手段からの信号に基づいて同期して第1搬送手段および第2搬送手段を制御する同期駆動を行う。
(もっと読む)
モータの駆動制御システムおよび駆動制御方法
【課題】位置検出データの転送誤りを敏速に検出することにより、初回稼動時から不用意な暴走を確実に防止する駆動制御システムを提供する。
【解決手段】位置検出器に位置データの監視機能をもたせ、位置検出器が保持した最新位置データと、サーボ制御装置から出力させた最新位置データのエコーバック信号とを比較判定して、差異があるときには駆動禁止状態に遷移して、駆動禁止信号をサーボ制御装置に出力する。サーボ制御装置では、駆動禁止信号を入力すると駆動禁止状態に遷移して、フィードバック用位置データを最新位置データから推定位置データに切替え、指令信号を運転指令から所定の停止制御指令信号に切替え、速度、トルクがゼロに下がるまでは駆動を継続しながらモータを停止させる。
(もっと読む)
アクチュエータ用駆動制御装置及びアクチュエータの駆動制御方法
【課題】アクチュエータが備える変位部材の移動距離及び移動時間を設定するだけで、変位部材の詳細な動作を決定し、該変位部材を精度よく変位させる。
【解決手段】アクチュエータ用駆動制御装置10は、変位部材16の移動距離を設定する移動距離領域30と、移動時間を設定する移動時間領域32と、移動距離及び移動時間に基づいて任意のタイミングにおける変位部材16の変位量又は変位速度の目標値を演算する目標値演算部40と、変位部材16の変位量又は変位速度の目標値に基づいて駆動電力Pを生成して、該駆動電力Pをアクチュエータ12に送る駆動制御部26と、を備える。
(もっと読む)
電動アクチュエータ
【課題】制御手段に位置データを送信する際に、外来ノイズの影響を受けにくい電動アクチュエータを提供する。
【解決手段】ロッド24と一体となって収容孔13内を摺動する移動体はマグネット28を保持している。ボディ12に形成された取付溝12aには、第1の位置検出装置29および第2の位置検出装置30が取り付けられている。各停止位置検出装置29,30は、マグネット28を検出していないとき、Lレベルの信号を制御コントローラ40に出力している。一方、ロッド24と移動体が収容孔13内を移動し、各停止位置検出装置29,30がマグネット28を検出すると、Hレベルの信号を制御コントローラ40に出力する。
(もっと読む)
産業機械および産業機械の制御方法
【課題】 制御対象物を適切に制御できない場合であっても、制御対象物の移動を確実に停止できる産業機械および産業機械の制御方法を提供する。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させる移動機構2と、移動機構2を制御する制御装置3とを備えるものであって、制御装置3は、制御対象物の軸方向への移動を停止させる停止手段30を有し、停止手段30は、制御対象物の軸方向への移動速度を監視する速度監視部302と、制御対象物の軸方向への移動速度が所定の閾値を超えているか否かを判定する判定部303と、制御対象物の軸方向への移動速度が所定の閾値を超えている場合に、制御対象物の移動を停止させる停止部304とを備える。
(もっと読む)
太陽光発電装置
【課題】対環境性能が高く最低限の発電量を確保して発電量の低下や変動を抑えることができるとともに、大電力を確保するために多数の太陽電池モジュールを設置する必要がある場合においてもコストを抑えることができる太陽光発電装置を提供する。
【解決手段】複数の太陽電池モジュールと、複数の太陽電池モジュールが設置された場所の環境条件を測定する環境測定装置5と、環境測定装置5により測定された環境条件に基づいて、複数の太陽電池モジュールの各々がなすべき目標仰角を算出する演算装置6と、演算装置6により算出された目標仰角に基づいて、複数の太陽電池モジュールの各々の仰角を制御する方向制御装置7とを備える。
(もっと読む)
強風退避型太陽光発電システム
【課題】太陽光パネル上の個々の太陽電池セルを動かすようにすることで、すべての太陽電池セルが太陽光を垂直に受ける向きになるように保つことができるようにした太陽光発電システムにおいて、個々の電池パネルが風圧に弱いという問題を解消することができる太陽光発電システムを提供する。
【解決手段】駆動可能な支持部0120で支持される複数の太陽電池セル0110と、各太陽電池セル0110の支持部0120を太陽追尾のために姿勢駆動する駆動部0130と、風速を検知する風速検知部0140と、検知した風速が、太陽電池セル耐風圧許容度を超えるか判断する判断部0150と、判断結果が耐風圧許容度を超えるとの判断結果である場合に太陽電池セル0110が風圧に対して安全となる姿勢となるように駆動部0130を制御する制御部0160とからなる強風退避型太陽光発電システム。
(もっと読む)
移動体駆動制御システムの異常監視装置
【課題】コンピュータ(CPU)で制御するサーボ系において、コンピュータの異常検出遅れ時間の短縮、異常検出からサーボモータの減速停止動作開始までの空走時間の短縮及び異常停止時のショック軽減を実現できるようにする。
【解決手段】移動体駆動制御システムは、サーボモータ11を駆動するサーボアンプ12と、該サーボアンプ12に速度指令を出力するサーボ指令部13と、サーボ指令部13を制御するCPU(コンピュータ)14とから構成されている。サーボ指令部13内には、CPU14の動作が異常になっていないか否かを監視する異常監視手段22と、この異常監視手段22によりCPU14の異常が検出されたときに所定の減速停止プロファイルに従ってサーボモータ11を減速して停止させるようにサーボアンプ12に出力する速度指令を変化させる異常時減速停止手段23としての機能が組み込まれている。
(もっと読む)
電動機の制御装置
【課題】簡単な調整によって負荷機械に応じた適切な制御パラメータを得ることができ、多種多様な負荷機械を高精度かつ安定に運転可能とした電動機の制御装置を提供する。
【解決手段】電動機16により駆動される負荷機械20の位置が位置指令に一致するように電動機16を制御する制御装置であって、位置制御部12、速度制御部13及び電流制御部16を有する制御装置において、実現したい応答の速さを示す応答性設定信号と負荷機械種別判別信号とに基づいて、位置制御部12、速度制御部13及び電流制御部16にて使用する制御パラメータを自動的に演算する制御パラメータ設定手段23を備え、この制御パラメータ設定手段23における制御パラメータの演算アルゴリズムを、前記負荷機械種別判別信号に応じて変更する。
(もっと読む)
平面モータ
【課題】スライダをプラテンから降ろして吊り上げることなくスライダのエアベアリング面を直接メンテナンスできる平面モータを提供する。
【解決手段】
エアベアリング19によりスライダ12をプラテン11の上面に浮上させ、2次元方向に移動させる平面モータにおいて、
プラテン11に上面高さを揃えて外付けされ、スライダ12の底面よりも小さな開口部51aと、この開口部51aを密封状態にふさぐ蓋部511と、この蓋部511を開閉する駆動機構512と、蓋部511を開いた状態において開口部51aからスライダ12のエアベアリング面12aを清掃するメンテナンス部18とを有する脱着式プラテン51を備えたことを特徴とする平面モータ。
(もっと読む)
位置決め装置の障害履歴情報管理システム
【課題】バックアップ電源を搭載していなくても確実に障害履歴情報を取得できる位置決め装置の障害履歴情報管理システムを実現する。
【解決手段】 位置決め装置の障害履歴情報管理システムにおいて、
位置決め装置1の運用開始からの経過時間情報121と、位置決め装置1の障害発生時における経過時間情報121と障害の内容を含む障害履歴情報122が保存される不揮発性メモリ12と、
この不揮発性メモリ12から読み出した経過時間を初期値として時刻を計時し、不揮発性メモリ12に保存された経過時間情報121の更新を行うCPU10と、
経過時間情報121と現在時刻情報21とを対応付ける制御装置2と、
を備えたことを特徴とする位置決め装置の障害履歴情報管理システム。
(もっと読む)
回転機械
【課題】運転範囲内における動翼の振動応答を低減できる回転機械を提供すること。
【解決手段】この回転機械1は、ロータ5を回転させて動力を発生する回転機械である。この回転機械1では、ロータ5の回転数に応じて共振が発生する領域を共振回転数領域と呼ぶときに、この共振回転数領域にてロータ5の回転数を増減させる回転数増減手段7が設けられている。例えば、この回転数増減手段7が空気量制御あるいは燃料量制御によりロータ5の回転数を制御している。
(もっと読む)
サーボモータ制御回路
【課題】モータの作動異常判定を迅速に行うとともに、迅速にモータを停止させることが可能なモータ制御回路を提供する。
【解決手段】通信可能に接続された主制御装置から、制御対象を駆動するサーボモータの目標停止位置を含むサーボモータ駆動指令を受信する受信手段と、サーボモータの出力軸に設けられ、該サーボモータの回転位置を検出する回転位置検出手段と、サーボモータの回転位置が目標停止位置に到達するように、該サーボモータを駆動制御する駆動制御手段と、を備えるサーボモータ制御回路であって、サーボモータの回転位置の変化を検出する回転位置変化検出手段と、回転位置の変化に基づいて、該サーボモータが作動限界位置に到達したか否かを判定する作動限界判定手段と、を備え、駆動制御手段は、サーボモータが作動限界位置に到達したと判定したとき、主制御装置からのサーボモータ駆動停止指令を受信することなくサーボモータの駆動を停止する。
(もっと読む)
マーキング制御システム及びこれを用いてマーキングされた部材同士の位置合わせ方法
【課題】マーキングにより2つの部材をどのような位置、角度で合わせ、どのような位置からカメラにてパターンマッチングする場合でも、的確に互いの位置を合わせることができるマーキング制御システム及びこれを用いてマーキングされた部材同士の位置合わせ方法を提供する。
【解決手段】マークを第1及び第2の部材のそれぞれに付すためのマーキング機に備わるマーキング制御システム1であって、組立計画データベース2と、カメラ情報が格納されたカメラデータベース3とから情報を取得し、カメラから見た時のカメラ平面画像を導出する平面導出処理部8と、マーキング位置情報が格納されたマーキングデータベース4と、マークの形状が格納されたマークデータベース5とから、マークをカメラにてパターンマッチングできる形状に変形するためのマーク変形処理部9とを有し、変形マーク変換情報を、マーキング機7に備わるマーキング手段に伝達する。
(もっと読む)
位置決め制御システムおよび位置決め制御装置
【課題】信頼性の高い絶対位置座標管理を実行する位置決め制御システムおよび位置決め制御装置を得ること。
【解決手段】位置決め制御装置は、自身以外の複数の位置決め制御装置の夫々が基準とする位置指令値と駆動軸の絶対位置座標値との対を夫々バックアップするメモリを備え、絶対位置座標を復元すべき事象が発生した際、複数の位置決め制御装置に夫々バックアップされている絶対位置座標値およびこの絶対位置座標値に対応する位置指令値に基づいて現在の絶対位置座標値を夫々算出し、夫々算出した絶対位置座標値の整合性を確認する。
(もっと読む)
位置決め装置及び位置決め方法
【課題】被駆動体の電源遮断後における再起動時に位置の特定を必要とする最終出力端の現在位置を特定可能な位置決め装置及び位置決め方法を提供する。
【解決手段】被駆動体を減速機を介して駆動するモータ10と、減速機の被駆動体側出力軸に取り付けられ出力軸の回転位置を検出するアブソリュート型エンコーダ12と、モータの回転位置をパルスを介して検出するモータ側エンコーダ11と、電源投入によりモータを原点方向に動作させ、モータ側エンコーダの基準エンコーダパルスを出力させるパルス出力手段と、基準エンコーダパルスの位置におけるアブソリュート型エンコーダの現在値を読み取る現在値読み取り手段と、読み取った現在値と予め決められたモータの回転原点位置とからモータ回転数を演算するモータ回転数演算手段と、演算結果に基づき被駆動体の位置を検出する被駆動体位置検出手段とを備えている。
(もっと読む)
ビルトインテスト回路を内蔵したジンバル制御システム
【課題】本発明は、ジンバル制御システムにビルトインテスト回路を設け、このビルトインテスト回路によって励磁信号の有無を検出し、異常時のジンバルの損傷を防止することを目的とする。
【解決手段】本発明によるビルトインテスト回路を内蔵したジンバル制御システムは、ジンバル制御システム(2)にビルトインテスト回路(18)が内蔵され、このビルトインテスト回路(18)により、レゾルバリファレンス出力回路(13)からの励磁信号(14)の有無を検出し、この励磁信号(14)が停止した状態で三相ブラシレスモータ(7)への駆動信号(6)を停止し、ジンバルのストッパへの可動子の衝突を防止し、ジンバルの損傷防止を行う構成である。
(もっと読む)
モータ制御システムおよびその接続判定方法
【課題】2台のサーボアンプを通信ケーブルで接続するだけでマスター、スレーブの設定ができ、簡便に同期制御がおこなえるモータ制御システムを提供する。
【解決手段】サーボアンプ1(2)は、双方向通信手段17(28)の一方に駆動するサーボモータ3(4)のエンコーダ通信ケーブル5(6)が接続され、他方の双方向通信手段18と双方向通信手段27を通信ケーブ7で接続しており、装置コントロール部11(21)は、通信開始時のみ、出力するセレクタ切替信号11e(21e)によってセレクタ16(26)で双方向通信手段17,18(27、28)と信号レベル制御部14または信号レベル検出部15とを接続し、同期制御におけるマスター、スレーブを自動判定する。
(もっと読む)
位置決め装置
【課題】安価で簡易な構成によりスライダの位置検出を安定して行うことができるとともに、設計の自由度の高い位置決め装置を実現する。
【解決手段】互いに直交するX軸およびY軸の少なくとも1軸方向に位置制御されるスライダ1と、このスライダ1と対向する面に磁極の歯が形成されてスライダ1と平面モータを構成するプラテン10とを備えた位置決め装置において、
スライダ1の1軸方向の位置を検出するレゾルバ2と、
このレゾルバ2のスライダ1の進行方向側に隣接して配置されたレゾルバ2a,2bと、
このレゾルバ2a,2bの出力に基づいてレゾルバ2の出力を補正する補正部と、
この補正部からの出力に基づいてスライダ1の位置を算出する位置算出部と、
を備えたことを特徴とする。
(もっと読む)
1 - 20 / 58
[ Back to top ]