
Fターム[5H303FF04]の内容
位置、方向の制御 (6,897) | 位置検出信号の種類 (287) | 大きさを有する信号であるもの (247) | アナログ信号であるもの (38)
Fターム[5H303FF04]の下位に属するFターム
周期信号の位相が位置を示すもの (12)
Fターム[5H303FF04]に分類される特許
1 - 20 / 26
ギア加工機の制御装置
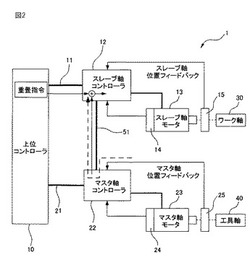
【課題】伝達遅れを抑え且つ分岐回路無しで、一つのマスタ軸に対して一つまたは複数のスレーブ軸を同期させる。
【解決手段】ギア加工機の制御装置(1)は、工具軸コントローラ(22)とワーク軸コントローラ(12)との間を直接的に接続して通信するバス(51)を具備し、工具軸位置検出センサ(25)により検出された工具軸(40)の位置はバスを通じてワーク軸コントローラに供給され、上位コントローラ(10)は所定の同期比と、ねじれ動作を加えるための重畳指令とをワーク軸コントローラに供給するようになっており、ワーク軸コントローラは、バスを通じて供給された工具軸の位置に同期比を乗算して作成された値と重畳指令とを加算して、ワーク軸(30)の移動指令を作成するようにした。
(もっと読む)
不感帯処理部を備えた電動機の制御装置

【課題】被駆動体を電動機によって同一動作パターンの繰り返し制御を行う場合において、被駆動体を停止させるために電動機の位置指令をゼロにしたときに発生し得る被駆動体の振動を抑制することができる電動機の制御装置を実現する。
【解決手段】電動機Mの制御装置1は、被駆動体2の位置を検出する位置検出部11と、電動機Mに与えられる位置指令と位置検出部11で検出した被駆動体2の位置との位置偏差をサンプリング周期毎に取得する位置偏差取得部12と、位置偏差取得部12により取得した位置偏差が所定の不感帯範囲内に含まれる場合は当該位置偏差をゼロに置き換えて出力する不感帯処理部13と、不感帯処理部13から出力された位置偏差がゼロになるような補正量を算出する繰り返し制御部14とを備え、位置偏差取得部12により取得した位置偏差と繰り返し制御部14により算出された補正量とに基づいて、電動機Mを制御する。
(もっと読む)
位置補正装置およびレーザ加工機
【課題】移動装置の位置決め制御の精度の向上と加工速度の向上とを両立できる位置決め装置およびレーザ加工機を提供すること。
【解決手段】座標平面におけるレーザビームBの加工予定軌跡と目標軌跡との間で距離の最も近い2点の組が探索され、その2点間の各々の距離が算出される。算出された各々の距離に基づいて加工予定軌跡を作るための指令が補正されるので、加工予定軌跡を目標軌跡に近づけることができる。これらの処理は被加工物WにレーザビームBを照射する前に実行されるので、レーザ加工時における移動装置の位置決め速度(移動速度)を低下させることなく移動装置の位置決め制御の精度を向上できる。また、変位にヒステリシスをもつピエゾアクチュエータ等の移動装置であっても、ヒステリシスを考慮した補正ができる。
(もっと読む)
位置決め装置、露光装置およびデバイス製造方法
【課題】位置決め精度の向上に有利な技術を提供する。
【解決手段】位置決め装置は、ステージと、ベースと、前記ステージと前記ベースとの間に配置されていて、ばね性を有する支持部で前記ステージを支持する支持機構と、前記ステージを駆動するように前記ステージと前記ベースとの間に配置されたアクチュエータと、前記アクチュエータを制御する制御部とを備える。前記制御部は、目標位置に対する前記ステージの位置偏差と、前記ステージと前記ベースとの相対位置の変動量とに基づいて、前記位置偏差が低減され、かつ、前記支持部の前記ばね性によって前記ステージに作用する力の少なくとも一部が打ち消されるように前記アクチュエータを制御する。
(もっと読む)
線形運動デバイスの制御装置
【課題】検出磁場と線形運動デバイスの位置とにずれがある場合でも、線形運動デバイスを正確に位置決めすることができる線形運動デバイスの制御装置を提供する。
【解決手段】デバイス11の磁石19が発生する磁場を検出し、検出された磁場の値に応答する出力信号VMOを出力する磁場センサ113、制御信号VCM[2:0]と出力信号VMOの振幅とを関連付けた電圧指令信号VCOを生成する電圧信号生成回路114、出力信号VMOと電圧指令信号VCOとの偏差を増幅して出力信号VEOを生成する差動増幅器115、出力信号VEOの値に応じて線形運動デバイス11を駆動する出力ドライバ112と、出力信号VEOを、磁場センサ113から出力される出力信号VMOの振幅に応じて補正し、出力ドライバ112への入力信号を生成するゲイン補正回路116によって制御装置を構成する。
(もっと読む)
4軸アライメントステージの原点位置設定方法
【課題】 4軸制御の原点復帰動作を駆動軸同士の機械的な姿勢の相互干渉を抑えた状態で可能にする。
【解決手段】 XYθガイドとボールねじ直動機構からなる駆動ユニットを4台備えた4軸アライメントステージにて、各駆動ユニットに仮の原点位置を設定して(S1)、それを基準に4軸制御による原点復帰動作を行う(S3)。次いで、全軸同時サーボオフを行い(S4)、その直後に生じる各駆動ユニットのガイドブロックの移動量を計測し(S5)記憶させる(S6)。その後、移動量の計測値を補正量として各駆動ユニットの仮の原点位置を補正し(S7)、補正後の仮の原点位置を基準とする原点復帰動作と、全軸同時サーボオフ直後の移動量の計測及び記憶と、移動量の計測値を補正量とする仮の原点位置の補正を繰り返し、全軸同時サーボオフ直後の移動量が収束したときの仮の原点位置を、4軸制御による実際の原点復帰動作用の原点位置に設定する。
(もっと読む)
弁開度制御システム
【課題】開又は閉指令を、開度に対応した時間、出力することで、弁を目標開度に操作する場合、目標開度近くで開/閉方向の反転動作を頻繁に繰り返すことなく、目標開度とすることが可能な弁開度制御システムを提供する
【解決手段】弁11を所望の開度に開閉制御する弁開度制御システムであって、弁11の開閉速度に基づき、設定された所望の目標開度に達するまでの開又は閉指令の出力時間を出力時間演算手段17で求め、 この出力時間の間、出力手段と18により弁11に開又は閉指令を出力する。この際、弁11の実測開度を開度制御手段19に入力し、この実測開度と目標開度との差が、予め設定した不感帯の範囲に入ると、弁11に対する開又は閉指令の出力を停止させる。
(もっと読む)
アクチュエータ用駆動制御装置及びアクチュエータの駆動制御方法
【課題】アクチュエータが備える変位部材の移動距離及び移動時間を設定するだけで、変位部材の詳細な動作を決定し、該変位部材を精度よく変位させる。
【解決手段】アクチュエータ用駆動制御装置10は、変位部材16の移動距離を設定する移動距離領域30と、移動時間を設定する移動時間領域32と、移動距離及び移動時間に基づいて任意のタイミングにおける変位部材16の変位量又は変位速度の目標値を演算する目標値演算部40と、変位部材16の変位量又は変位速度の目標値に基づいて駆動電力Pを生成して、該駆動電力Pをアクチュエータ12に送る駆動制御部26と、を備える。
(もっと読む)
同期制御装置
【課題】 複数のモータで同一方向の座標軸を駆動する機械に対して、汎用的な電機品を用いて各軸間相互に加わる無効反力を抑制すると共に、作業位置に対する同期制御を高精度に行なう同期制御装置を提供する。
【解決手段】 位置指令121を生成する位置指令生成部21と、2台の位置情報131,141に基づいてXY軸座標系である作業位置122を演算し、位置指令121と作業位置の一方の軸座標系位置122との差に基づいて新たな位置指令125を演算する第1の位置制御系を有する指令装置2と、新たな位置指令125と位置情報131,141との差に基づいてモータを駆動する指令を演算する第2の位置制御系をそれぞれ有する2台のモータ制御装置3,4と、を備える。
(もっと読む)
エンコーダ・フィードバック、誤差マッピング、および空気圧制御を用いた誤差補償システム
【課題】エンコーダ・フィードバック、誤差マッピング、および空気圧制御を用いた誤差補償システムを提供する。
【解決手段】リニア・エンコーダ23は、移動式往復台25の側面に設置した一対の側面リニア・エンコーダ23−1、23−1’と、移動式往復台25の一側部の下部に設置した一対の下面リニア・エンコーダ23−2、23−2’とで構成され、このように構成されたリニア・エンコーダ23が、基準マーク、垂直位置誤差を補償するためのLトラック、および水平位置[誤差]を補償するためのTトラックを有するスケールに沿って移動することで、高い精度レベルで平面度、ピッチ、真直度、ヨー、およびロールに関連した誤差を補償するものであり、したがって、加工することが不可能である部分を最小限にし、加工コストを減少させ、精密なステージを実現する。
(もっと読む)
サーボ制御回路、アクチュエータの制御装置、および撮像装置
【課題】周波数が高い領域においても良好な制御特性を維持するとともに、集積回路化が容易なPID制御によるサーボ制御回路を提供する。
【解決手段】サーボ制御回路100において、差分演算部10は、制御対象から検出された検出信号xに比例した量と第1の信号fに比例した量との差uを出力する。A/D変換部21は、差分演算部10の出力uをデジタル変換する。積分部22は、A/D変換部21の出力Uをデジタル積分する。D/A変換部23は、積分部22の出力に比例した量Fをアナログ変換して、第1の信号fとして出力する。加算演算部15は、A/D変換部21の出力Uに比例した量と積分部22の出力Fに比例した量との和Dを出力する。デジタルPI制御部40は、加算演算部15の出力Dと目標値Rとの偏差Eに基づいて比例演算および積分演算を行なうことによって、制御対象を制御する制御信号Yを生成する。
(もっと読む)
位置決め制御ユニット、位置決め制御方法および位置決め制御プログラム
【課題】位置決め過程の位置精度を向上させる位置決め制御ユニット、位置決め制御方法および位置決め制御プログラムを提供する。
【解決手段】位置決め制御ユニット100は、特定の位置決め速度に基づいて1制御周期あたりの操作量を算出する操作量算出部121と、算出された操作量を出力する出力制御部123と、出力された操作量をデジタル信号からアナログ信号へ変換するD/A変換部124と、を備え、アナログ信号により圧電素子を駆動させ、位置検出を伴う閉ループでステージの位置決めを制御する。1制御周期あたりの操作量を制御することで、位置決め動作による振動を抑制することができる。その結果、位置決めの精度を向上させることができる。
(もっと読む)
半導体装置および撮像装置
【課題】低コスト化を図るとともに、駆動電流制御の精度の向上を図ることが可能な半導体装置および撮像装置を提供する。
【解決手段】半導体集積回路101は、駆動電流値を示す複数ビットの駆動データのうち、最上位ビットまたは最上位ビットから連続する複数のビットである上位データに基づいて第1の駆動電流を生成し、負荷に供給する第1の駆動電流生成部21Aと、駆動データのうち、最下位ビットまたは最下位ビットから連続する複数のビットであり、かつ少なくとも駆動データのうちの上位データ以外のすべてのデータを含む下位データに基づいて第2の駆動電流を生成し、負荷に供給する第2の駆動電流生成部21Bとを備える。
(もっと読む)
制御データ発生装置
【課題】自動操作と手動操作が可能な操作子において、自動位置決め完了時の実位置と目標位置との誤差を、その後の手動操作に際して実効的に解消し、違和感のない制御データを発生する。
【解決手段】通常は所定のスケール特性に従う制御データを位置データに応じて発生する。操作子が目標位置Ptに自動位置決めされた直後の手動操作において変更スケール特性を適用する。変更スケール特性においては、位置決め完了時における実位置Prに対応して前記所定のスケール特性上の目標位置Ptに対応する制御データDtが出力されるように起点を設定し、該起点の位置から少なくとも目標位置に達するまでの区間を含む第1の変更区間を設定し、位置検出器12で検出された位置データに対応して発生される制御データが、起点に対応する制御データDtから該第1の変更区間の終点の位置に対応する前記所定のスケール特性上の制御データまで漸次変化するようにする。
(もっと読む)
位置制御装置
【課題】リップルパルスに基づいて演算された位置と実際の位置との間のずれを適切に補正することが可能な位置制御装置を提供する。
【解決手段】位置制御装置1は、可動部材の現在位置情報をリップルパルスに基づき演算する現在位置情報演算部77と、可動部材が機械的にロック状態となる端部の位置情報をロック位置情報として記憶しているロック位置情報記憶部78と、端部に対して可動範囲の側と可動範囲から外れた側とに設定されたロック検出エリアを記憶しているロック検出エリア記憶部82と、可動部材が移動して停止した時に現在位置情報により示される現在位置がロック検出エリア外から動き始め、可動範囲から外れた側のロック検出エリアで停止した場合にロック位置情報で現在位置情報を更新する現在位置情報更新部75とを備える。
(もっと読む)
アクチュエータの回転伝達誤差補正方法およびアクチュエータの駆動制御装置
【課題】出力軸を支持する転がり軸受けに起因する回転伝達誤差を補正できるアクチュエータの回転伝達誤差補正方法を提案すること。
【解決手段】アクチュエータ2の出力軸6を支持するベアリング7の転動体7cの1つにマグネット10を組み込み、ホールセンサ12によってマグネット入りの回転位置検出用転動体11が1回転することを検出し、1回転の間において、モータ軸4を一定角度回転させる毎に出力軸6の実回転位置を検出する。検出結果に基づきモータ軸4の各回転位置における、出力軸6の実回転位置のその目標回転位置からのずれ量を算出して記憶部1aに記憶する。駆動制御装置1は、アクチュエータ2の駆動制御時には、記憶部1aに記憶されているずれ量に基づき出力軸6の回転位置を補正し、ベアリング7に起因する回転伝達誤差を除去する。
(もっと読む)
ステージ可動機構
【課題】
基部に対するステージ面を上下方向とピッチ方向、ロール方向に可動可能で、他の自由度には強く拘束され、かつ、アクチュエータへの力学的な負担が少ないステージの可動機構を、簡素で安価な構造で実現する。
【解決手段】
バネ性を有する素材がもつ弾性変形が許容される方向を活かすよう,板バネまたは曲げ棒バネなどのバネ材を用い、一つの間接部を有するくの字型の支持機構30〜33を構成し、これを二つ以上用いてステージ10と基部20とを弾性接続することで課題の自由度をもたらすステージ可動機構を構成している。同時に,くの字型を形成することで支持機構が弾性変形する際には,変位増加に対する反力が一定か減少するような逆バイアス特性がもたらされることで,アクチュエータを用いた場合の動作寿命を向上させることができる。また、センサ装置と組み合わせることによって3自由度の動作検出装置となる。
(もっと読む)
位置決め制御ユニット、位置決め制御方法および位置決め制御プログラム
【課題】A/D変換の精度をデバイスの分解能以上に高め、位置決めの精度を向上させる。
【解決手段】ステージの位置決め制御をする位置決め制御ユニット120であって、1制御周期あたりの操作量を算出する操作量算出部121と、ステージ140の駆動のために、算出された操作量を出力する出力部126と、センサ150により1制御周期あたり複数回検出されたステージ140の検出位置の、1制御周期にわたる平均値を現在位置として算出する現在位置算出部129と、を備える。これにより、検出の分解能をデバイスの分解能以上に高くして、位置決めの精度を向上させることができる。たとえば、位置換算値1nmの分解能のA/D変換部127を用いて0.1nm単位の位置検出を行うことができる。
(もっと読む)
位置決め制御ユニット、位置決め制御方法および位置決め制御プログラム
【課題】D/A変換の精度をデバイスの分解能以上に高め、位置決めの精度を向上させる。
【解決手段】ステージの位置決めを制御する位置決め制御ユニット120であって、1制御周期あたりの操作量を算出する操作量算出部121と、算出された操作量を、1制御周期の積分値が等しくなるように、時間的に分割して所定分解能で出力する出力制御部123と、出力された操作量をデジタル信号からアナログ信号へ所定分解能で変換するD/A変換部124と、を備え、アナログ信号により圧電素子を駆動させることで、ステージの位置決めを制御する。これにより、D/A変換の精度をデバイスの分解能以上に高くして、位置決めの精度を向上させることができる。
(もっと読む)
ジンバル軸受の摩擦を制限するようにフレックスピボットを有するジンバルサーボシステム用軸受組立体
ジンバルサーボシステムへの使用に適した支承組立体が提供される。支承組立体は、ハウジングと、第1のシャフトと、第1のシャフトがハウジングに対して軸線回りに回転するように第1のシャフトをハウジングに回転可能に結合する軸受と、ペイロードに結合されるようになった第1の端部を有する第2のシャフトと、フレックスピボット要素とを有し、このフレックスピボット要素は、第2のシャフトがフレックスピボット要素を介して第1のシャフトに対して回転するよう第1のシャフトの端部を第2のシャフトの第2の端部に回動可能に結合する。第2のシャフトの回転に応答して、フレックスピボット要素は、第1のシャフトの軸線回りに所与の角度回動するようになっている。回動角度は、第1のシャフトに対する第2のシャフトの変位を反映し、軸受の摩擦外乱に対応する。  (もっと読む)
(もっと読む)
1 - 20 / 26
[ Back to top ]