
Fターム[5H303HH07]の内容
Fターム[5H303HH07]に分類される特許
1 - 20 / 44
弁開度制御システム
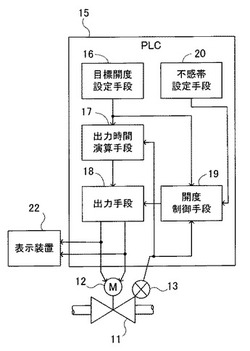
【課題】開又は閉指令を、開度に対応した時間、出力することで、弁を目標開度に操作する場合、目標開度近くで開/閉方向の反転動作を頻繁に繰り返すことなく、目標開度とすることが可能な弁開度制御システムを提供する
【解決手段】弁11を所望の開度に開閉制御する弁開度制御システムであって、弁11の開閉速度に基づき、設定された所望の目標開度に達するまでの開又は閉指令の出力時間を出力時間演算手段17で求め、 この出力時間の間、出力手段と18により弁11に開又は閉指令を出力する。この際、弁11の実測開度を開度制御手段19に入力し、この実測開度と目標開度との差が、予め設定した不感帯の範囲に入ると、弁11に対する開又は閉指令の出力を停止させる。
(もっと読む)
位置決め装置及び位置決め方法

【課題】高精度かつ高速に位置決めすることが可能な位置決め装置を提供すること。
【解決手段】本実施形態に係る位置決め装置は、撮像器3による撮像画像データに基づいて追跡誤差信号を算出する画像処理部40と、追跡誤差信号及び粗動機構のセンサ信号に基づく粗動機構制御信号により粗動機構1を制御する粗動機構制御駆動部10と、追跡誤差信号及び微動機構のセンサ信号に基づく微動機構制御信号により微動機構を制御する微動機構制御駆動部20と、粗動機構1の駆動力又は駆動トルクと、粗動機構1のセンサ信号と、機構パラメータ記憶部に記憶された機構パラメータとから、機構の運動方程式に基づいて粗動機構の動作により発生する撮像器の撮像画面内の加速度を算出し、粗動微動機構部の目標物に対する追跡誤差を低減させるために微動機構制御信号へ加算する微動機構追跡補正信号を加速度に応じて生成する補正信号生成部30とを具備する。
(もっと読む)
平面モータ
【課題】価格の安いリニアエンコーダを用いて安価な平面モータを実現する。
【解決手段】プラテン上に載置され該プラテン上をX−Y方向に駆動可能に構成されたスライダを有する平面モータにおいて、前記スライダの位置検出手段として前記スライダに固定したヘッドと前記スライダが駆動されるX−Y方向に配置されたスケールからなるリニアエンコーダを用いた。
(もっと読む)
搬送装置
【課題】 安定した精密な位置決め制御により、振動を防止し、高速で搬送することができる搬送装置を実現する。
【解決手段】 搬送装置10は、移動手段に載置する装置ベース11と、平行に設けられた1対の柱状部材12aと1対の柱状部材12aの一端を連結する連結部12bとからなるコアにソレノイドコイル12cを巻いて形成され、装置ベース11の上面11aに立設された電磁石12と、ソレノイドコイル12cの間に配置された永久磁石15を備え、電磁石12により上方に付勢可能に構成された、被搬送物を載置する搬送台13と、を備えており、搬送台制御変位計測手段21により計測された搬送台制御変位xと装置ベース変位計測手段22により計測された装置ベース変位yとに基づいて、位置制御手段23により、電磁石12に供給する電流を制御することにより搬送台13の位置を制御することができる。
(もっと読む)
位置決め制御装置
【課題】減速機構軸の減速後軸の回転角度を検出する必要がある場合、角度検出器の選定は減速機構の構造、被回転体により左右される。その結果角度検出器の大型化、重量化により位置決め装置全体が高額となる。
【解決手段】減速機構2の減速前軸4の角度より減速後軸3の角度を推定計算するようにすることで、減速機構2、被回転体の構造に左右されずに角度検出器7を選定できるようになり、位置決め装置全体の軽量化、低価格化を実現することができる。
(もっと読む)
リニアモータ位置検出システム
【課題】測長距離の制限を受けることがないと共にリニアモータの能力を十分に発揮させて制御時間の短縮を図ることができるリニアモータ位置検出システムを提供する。
【解決手段】リニアモータ5により移動されるテーブル4の直線運動をラック12とピニオンギア13により回転運動に変換するようにしたので、直線運動系での検出は有限目盛りであるのに対して回転運動系での検出は無限目盛りとなり、理論的には直線運動系の測長距離が無限であっても、直線運動系の測長距離を回転運動系の測長距離に容易に変換することができ、測長距離の変更に容易に対応することができる。
(もっと読む)
移動体制御装置、画像形成装置、用紙搬送装置及び画像読取装置
【課題】高性能のカウント器やそれに代わるAISCを用いることなく、現在位置Xdetを把握する。
【解決手段】エンコーダー910から出力される2相のパルス信号をそれぞれ検出して計数処理を行う2相カウンタ906と、そのうちのA相パルス信号だけを検出して計数処理を行う1相カウンタ907とを設け、目標位置Xtgtと、それらカウンタによって把握した現在位置との差である位置誤差Xeを算出し、位置誤差Xeに応じた目標速度Vtgtを増幅手段903から出力する一方で、位置誤差Xeについて、比較的小さい値であるのか、比較的大きい値であるのかを誤差判定手段905によって判定し、比較的小さい値である場合には、2相カウンタ906によって現在位置x2を求める一方で、比較的大きい値である場合には、1相カウンタ907によって現在位置x1を求めるようにした。
(もっと読む)
平面モータ
【課題】誤差の少ない高精度な位置検出が可能な平面モータを実現する。
【解決手段】プラテン上に配置されたスライダをX軸方向及びY軸方向に位置制御する平面モータにおいて、
前記スライダにレーザ光源、レンズおよびイメージセンサを搭載し、前記レーザ光源から出射したレーザ光を前記プラテンで反射させ前記レンズを介して前記イメージセンサで受光するように構成した。
(もっと読む)
ステージ装置およびその制御方法
【課題】試料と副ステージを確実に密着させても、試料を破損する危険の少ないステージ装置の制御方法を提供する。
【解決手段】試料9を載置する主基台1と、主基台1に対向配置された副基台7と、副基台7上のアクチュエータ6と、副基台7からバネで吊り下げられるアクチュエータ6によって制御される副ステージ8と、副基台7と前記副ステージ8との間の距離を計測する距離センサとを備え、試料9の厚さ方向の公差を接触時最大位置決め誤差と定義したとき、アクチュエータ6の各出力推力制限値FL[p]を、予め求めた試料が存在しない場合の各出力推力に試料9が許容する押し当て力を加えた値とするステップと、副ステージ8の位置許容偏差を副ステージ8に設定された位置許容偏差に接触時最大置決め誤差を加えた値とするステップ等の5ステップより試料9にアクチュエータ6が接触したと判断する。
(もっと読む)
同期制御装置
【課題】回転軸である追従軸が回転軸である被追従軸に同期する制御を行う同期制御装置を提供すること。
【解決手段】追従軸xの速度Vcが被追従軸yの速度Vp(目標速度)に到達した時、1回転の移動量で丸めた目標位置との遅れ量を挽回するために更に加速してから減速させる制御を行う。追従軸xの速度Vcが被追従軸yの速度Vp(目標速度)に到達した時、追従軸xの1回転の移動量で丸めた被追従軸yに対する目標位置との遅れ量は面積S4で表され、追従軸xを時間t5まで加速しその後時間t6まで減速する。従来方式による追従軸xの加減速方法に比較し、同期完了までの時間が(t4−t6)の長さ短縮されている。また、追従軸xの最大速度Vcmaxも従来方式に比べて遅い速度である。
(もっと読む)
制御装置
【課題】二重ジンバル機構においてインナージンバルとアウタージンバルの駆動制御を行う制御装置に関し、アウタージンバルとインナージンバル間の衝突や視軸変動の発生を抑止する。
【解決手段】アウタージンバルとインナージンバルを有する二重多軸ジンバルの駆動制御を行う制御装置であって、ジョイスティク51からのアウター用基準指令値とアウター速度センサ24の出力値との偏差であるアウター偏差値に基づきアウタージンバルを駆動制御するアウター制御部60Aと、中心角度指令値とインナー角度センサ36の出力値との偏差であるインナー偏差値とに基づきインナージンバルを駆動制御するインナー制御部70Aと、ジョイスティク51から指向操作によりアウター用基準指令値が入力されている時、前記インナー偏差値をアウター制御部60Aに反映させる補正手段(差角指令補償器82,加算器83)を設ける。
(もっと読む)
速度検出装置および位置検出装置および位置決め装置
【課題】安価で簡易な構成によりスライダの位置検出を安定して行うことができるとともに、設計の自由度の高い位置決め装置を実現する。
【解決手段】X軸方向に位置制御されるスライダ1と、このスライダ1と対向する面に磁極の歯が形成されてスライダ1と平面モータを構成するプラテン10とを有するとともに、
スライダ1のX軸方向の位置に応じた信号を出力するレゾルバ30と、スライダ1のX軸方向の加速度を検出する加速度センサ31とを備えた位置検出装置300を備え、
位置検出装置300がレゾルバ30と加速度センサ31の出力に基づいてスライダ1の位置を求めることを特徴とする位置決め装置。
(もっと読む)
位置決め装置および制御方法
【課題】静止安定性を有する位置決め装置。
【解決手段】対象物を移動させる駆動力を発生する駆動部と、対象物を目標位置に向かって移動させるべく駆動部をサーボ制御する制御部と、対象物を、駆動力よりも大きな固定力で固定する固定部とを備え、移動した対象物が目標位置に到達した後、少なくとも固定部が対象物を固定するまで、制御部は、対象物が移動していた期間のサーボゲインよりも小さなサーボゲインでサーボ制御を継続する。上記位置決め装置において、浮上力を発生させて対象物を浮上させる浮上力発生部を更に備え、浮上力発生部が浮上力の発生を停止した後、少なくとも少なくとも固定部が対象物を固定するまで、制御部は、力発生部が対象物を浮上させていた期間のサーボゲインよりも小さなサーボゲインでサーボ制御を継続してもよい。
(もっと読む)
位置制御装置
【課題】加工精度をより向上でき得る位置制御装置を提供する。
【解決手段】位置制御装置は、位置指令Pcと検出位置Pmとの位置偏差に位置ループゲインKpを乗じて速度指令Vcを算出する位置制御と、速度指令Vcと検出速度Vmとの差分値である速度偏差を求めた後に当該速度偏差と速度ループ比例ゲインPvとの乗算値および当該速度偏差と速度ループ積分ゲインIvとの乗算値を加算してトルク指令Tcを算出する速度制御と、を行なってサーボモータ10を制御することで該サーボモータ10によりボールネジ11を介して駆動される制御対象12の位置を制御する。この位置制御装置は、位置指令Pcの値変化の加加速度を算出する手段16,17,18と、該加加速度の大きさに応じて、位置ループゲインKp、速度ループ比例ゲインPv、および、速度ループ積分ゲインIvの少なくとも一つを可変するゲイン演算部19と、を備える。
(もっと読む)
機械診断方法及びその装置
【課題】信頼性の高い損傷状況の診断を可能とする。
【解決手段】機械診断装置20は、位置指令値から得られるサーボモータ3へのトルク指令値に基づいて駆動対象駆動力を推定する駆動対象駆動力推定部21と、駆動対象駆動力からボールネジ4の弾性変形誤差を推定する弾性変形誤差推定部23と、サーボモータ3の回転位置とテーブル2の位置とから位置偏差を演算する位置偏差演算部22と、弾性変形誤差と位置偏差とを用いて機械損傷係数を演算し、得られた機械損傷係数を予め設定されている閾値と比較して駆動対象の損傷状況を診断する機械損傷診断部24とを備えている。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】多慣性系と見なされる機構をモータによって位置制御する時に、動作指令に対して、振動等を生じずに応答性高く追従するフィードフォワード制御を実現するモータ制御装置を提供する。
【解決手段】位置フィードバックコントローラを通して与えられる指令出力に対して、負荷速度からモータ速度までの伝達特性に基づくフィルタ処理を行い、処理結果を前記速度フィードバックコントローラへの速度指令値として出力する第1のフィルタ手段VFF2と、前記指令出力に対して、モータトルクから負荷速度までの伝達特性の逆特性に基づくフィルタ処理を行う第2のフィルタ手段VFF1とを有する。これにより、前記速度指令値を前記速度フィードバックコントローラへの速度フィードバック値に加算すると共に、前記第2のフィルタ手段の処理結果を、前記速度フィードバックコントローラを通して与えられるモータトルク指令値に加算する構成とした。
(もっと読む)
位置又は速度制御装置
【課題】 モータと機械負荷間の結合剛性が十分でない動力伝達機構を含むフィードバック制御系の制御性能の向上を実現できる位置又は速度制御装置を提供する。
【解決手段】 減速器12を介してモータ10と接続された機械負荷11の速度を制御する速度制御装置の場合、負荷速度コントローラ16は、負荷速度指令値と負荷速度の算出値との差に基づいて負荷軸トルク指令値を算出し、算出された値を基にねじり角指令値θrefを出力する。そして、負荷速度コントローラのマイナーループに、ねじり角指令値とねじり角Δθの算出値との差に基づいてモータトルク指令値を出力するねじり角コントローラ17を備えた。
(もっと読む)
位置制御装置
【課題】非線形ばね特性をモデル化し、最適なパラメータを事前に把握することを可能とし、そのため簡単な調整作業によって高精度な位置制御を行うことが可能な位置制御装置を提供する。
【解決手段】転がりガイド5によってガイドされるステージ4の位置制御を行う位置制御装置である。ステージ4の速度に基づき転がりガイドの非線形ばね特性から求めた摩擦力によって、制御系におけるステージの推力を補正する。指令位置と実際位置との位置偏差に基づいてステージの位置制御を行うフィードバック制御系を有し、この制御系に転がりガイド5の摩擦力をフィードフォワードゲインとして組み込む。転がりガイド5の非線形ばね特性はブラシモデルを用いて構成する。
(もっと読む)
サーボ制御装置およびこの制御装置の電流検出方法
【課題】本発明は、停止時の電流検出の分解能を上げるとともに、停止時の振動を抑えることができる方法を提供することを目的とする。
【解決手段】ΔΣ方式のA/D変換器による電流検出手段を備えたサーボ制御装置の電流検出方法において、前記サーボ制御装置は、フィルタ10のフィルタリング時間が切替えられる切換手段11を備えたものである。
(もっと読む)
小型電動アクチュエータ
【課題】ロッドの位置と移動速度を簡単な構成で制御することができる小型電動アクチュエータを提供すること。
【解決手段】駆動源である電動モータ3の回転を減速機構によって減速してねじ軸4に伝達し、該ねじ軸4に進退可能に螺合するロッド5をねじ軸4の回転によって往復直線移動させる小型電動アクチュエータ1において、前記ロッド5の移動方向に沿ってポテンショメータ(可変抵抗器)10を配設するとともに、該ポテンショメータ10の摺動子10aを前記ロッド5に固定し、該摺動子10aの移動に伴うポテンショメータ10の抵抗変化による電圧変化に基づいてロッド5の位置を制御する。又、前記電動モータ3をDCモータ(可変速モータ)で構成し、前記ポテンショメータ10の抵抗変化による電圧の変化率に基づいてロッド5の移動速度を制御する。
(もっと読む)
1 - 20 / 44
[ Back to top ]