
Fターム[5H303KK17]の内容
位置、方向の制御 (6,897) | 制御部、演算部の機能 (1,155) | 速度フィードバックループを有するもの (133)
Fターム[5H303KK17]の下位に属するFターム
指令値が位置偏差のみから得られるもの (52)
Fターム[5H303KK17]に分類される特許
1 - 20 / 81
モータ制御装置
マスタ軸とスレーブ軸との同期制御を行うモータ制御装置
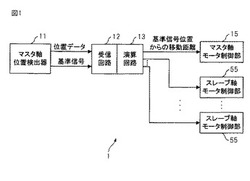
【課題】マスタ軸を駆動するマスタ軸モータとスレーブ軸を駆動するスレーブ軸モータとを正確に同期制御することができる、小型で低価格のモータ制御装置を実現する。
【解決手段】マスタ軸を駆動するマスタ軸モータ14とスレーブ軸を駆動するスレーブ軸モータ54とを同期制御するモータ制御装置1は、マスタ軸の位置データと所定一定周期の基準信号とを出力するマスタ軸位置検出器11と、マスタ軸位置検出器11が出力した位置データと基準信号とを受信するマスタ軸受信回路13と、マスタ軸受信回路13が受信した位置データと基準信号を受信した時点の位置データとの差分を、マスタ軸差分として算出するマスタ軸演算回路13と、マスタ軸差分をマスタ軸モータ14の動作と同期を取るための信号として用いてスレーブ軸モータ54の動作を制御するスレーブ軸モータ制御部55と、を備える。
(もっと読む)
ギア加工機の制御装置

【課題】伝達遅れを抑え且つ分岐回路無しで、一つのマスタ軸に対して一つまたは複数のスレーブ軸を同期させる。
【解決手段】ギア加工機の制御装置(1)は、工具軸コントローラ(22)とワーク軸コントローラ(12)との間を直接的に接続して通信するバス(51)を具備し、工具軸位置検出センサ(25)により検出された工具軸(40)の位置はバスを通じてワーク軸コントローラに供給され、上位コントローラ(10)は所定の同期比と、ねじれ動作を加えるための重畳指令とをワーク軸コントローラに供給するようになっており、ワーク軸コントローラは、バスを通じて供給された工具軸の位置に同期比を乗算して作成された値と重畳指令とを加算して、ワーク軸(30)の移動指令を作成するようにした。
(もっと読む)
一つの被駆動体を二つの電動機で駆動させる制御装置
【課題】二つの電動機間の機動力が互いに干渉することによって生じうる振動を抑制するために、二つのプロセッサで二つの電動機を制御することができる制御装置を提供する。
【解決手段】DSP11aは、取得した回転サーボモータ3aの速度値をDSP11bに送信するとともに回転サーボモータ3bの速度値をDSP11bから受信し、回転サーボモータ3aへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。DSP11bは、取得した回転サーボモータ3bの速度値をDSP11aに送信するとともに回転サーボモータ3aの速度値をDSP11aから受信し、回転サーボモータ3bへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。
(もっと読む)
同期制御装置、同期制御方法、同期制御プログラム、および同期制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】従動軸に加わる衝撃を緩和し、かつ同期開始位置で確実に同期制御を開始することができる同期制御装置、同期制御方法、同期制御プログラム、および同期制御プログラムを記録したコンピュータ読み取り可能な記録媒体を提供する。
【解決手段】ユーザ指令部62は、主軸と従動軸とが同期を開始する同期開始位置を指定する。カム曲線作成部64は、カム曲線を作成する。検出部65は、毎制御周期ごとの主軸の位置情報を検出する。制御部66は、同期開始位置までは、カム曲線と主軸の位置情報とに基づいて、制御周期ごとに従動軸に対する速度指令値を算出し、同期開始位置以降は、主軸と従動軸とのギア比に基づいて、制御周期ごとに従動軸に対する速度指令値を算出し、算出した速度指令値で従動軸を制御する。
(もっと読む)
制御パラメータ推定方法及び制御パラメータ設定装置
【課題】 送り装置において、移動体の位置や各指令移動位置を補正する制御を的確に行う。
【解決手段】 送り装置の制御において、駆動モータに入力されるトルク値をTとして、移動体を軸方向に往復動させ、一定時間毎又は移動体の予め定められた位置毎の駆動モータの角速度ωを計測し、計測された各角速度ω及びその時の前記入力トルクTを基に、下式に従って、各角速度ω及び入力トルクTに応じたパラメータTdを算出した後、算出したパラメータTdの前記位置への依存が小さくなるように、パラメータJ及びDの少なくとも一方の値を調整して、パラメータTdを再算出し、得られた調整後のパラメータJ、D及びTdの値を該パラメータJ、D及びTdの適正な値と推定する。
(数1)
Td=T−J(dω/dt)−Dω
(もっと読む)
モータ制御装置
【課題】動作中に振動特性が変化する制御対象に対する振動抑制制御の精度を向上できるモータ制御装置を得ること。
【解決手段】モータ1a及び振動可能要素1bを有する制御対象1の動作を制御して、制御対象の動作を動作目標値に追従するようにモデルトルクτaを生成するフィードフォワード制御部111と、モデルトルクに応じてトルク指令τMを発生させる発生部とを備え、フィードフォワード制御部は、制御対象の振動関連情報に応じて、振動特性を表す振動パラメータθを生成する生成部と、振動パラメータに応じて、動特性を模擬した数式モデル121を変更し、モデルトルクから変更された数式モデルにより、制御対象の動作状態を含むモデル変数を演算する第1の演算部と、モデル変数が一定の追従特性で動作目標値に追従するように、振動パラメータに応じて特性を変化させた演算によりモデルトルクを演算する第2の演算部とを有する。
(もっと読む)
制御装置、および測定装置
【課題】制御性能を向上させる制御装置、および測定装置を提供する。
【解決手段】駆動制御回路3は、測定子を変位させる駆動機構25を駆動制御し、駆動機構25に流れる電流を検出する電流検出センサ27と、駆動機構25を駆動させる駆動速度に応じた目標電流を設定する速度制御部32と、目標電流および電流検出センサ27により検出された検出電流の電流偏差に、積分ゲインおよび比例ゲインをかけて駆動機構25に出力する出力電流を設定する電流制御部33と、を具備し、電流制御部33は、駆動機構25の駆動速度に応じて、積分ゲインおよび比例ゲインのうちの少なくともいずれか一方を切り替える。
(もっと読む)
アクチュエータ用駆動制御装置及びアクチュエータの駆動制御方法
【課題】アクチュエータが備える変位部材の移動距離及び移動時間を設定するだけで、変位部材の詳細な動作を決定し、該変位部材を精度よく変位させる。
【解決手段】アクチュエータ用駆動制御装置10は、変位部材16の移動距離を設定する移動距離領域30と、移動時間を設定する移動時間領域32と、移動距離及び移動時間に基づいて任意のタイミングにおける変位部材16の変位量又は変位速度の目標値を演算する目標値演算部40と、変位部材16の変位量又は変位速度の目標値に基づいて駆動電力Pを生成して、該駆動電力Pをアクチュエータ12に送る駆動制御部26と、を備える。
(もっと読む)
サーボ制御器
【課題】2自由度制御構成のサーボ制御器において、用いる位置検出器の分解能が低くてもフィードフォワード制御器からフィードバック制御器へ与える操作量に生ずるリップルを確実に低減でき、高い追従性による高精度制御を可能にするサーボ制御器を得ること。
【解決手段】指令生成器10は入力される位置指令Aをコントローラ2の分解能から位置検出器5の分解能よりも高い分解能の内部位置指令150へ変換する。フィードフォワード制御器11aは、内部位置指令150を元に微分器110、フィルタ111を用いて速度フィードフォワード成分152を生成し、それを元に微分器112、フィルタ113を用いてトルクフィードフォワード成分154を生成する。内部位置指令150の分解能は位置検出器5の分解能よりも高いので、フィードフォワード成分152,154に生ずるリップルは位置検出器5の分解能を有する内部位置指令を用いる場合よりも低減される。
(もっと読む)
軸トルク制御装置
【課題】負荷側モータ(エンジン)の回転数制御と駆動モータ(動力計)の軸トルク制御の干渉を抑制した軸トルク制御ができる。
【解決手段】軸トルク制御器は、エンジンが速度制御されている場合に動力計に対するトルク外乱を外乱オブザーバ21により推定して動力計のトルク指令値にフィードバックすることにより動力計の加速度制御系を構成する。さらに、軸トルク検出値または軸トルク推定値を共振比制御理論に基づいて決定されるゲインKr(28)で動力計の加速度指令値にフィードバックし、さらにまた、動力計の速度検出値ω2を所定の共振抑制効果が得られるように決定したゲインKvで動力計の加速度指令値にフィ−ドバックし、及び、軸トルク指令値に軸トルク検出値が追従するように比例積分制御系23を構成する。
(もっと読む)
産業機械
【課題】 移動機構の位置に基づく信号を出力するリニアエンコーダの原点位置を検出する動作を不要にでき、短時間で測定を開始できる産業機械を提供する。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させるスピンドル2と、スピンドル2の位置を制御することにより制御対象物の位置を制御する制御装置3とを備えるものであって、スピンドル2の絶対位置を出力するアブソリュート型のリニアエンコーダ11を備える。このため、三次元測定機1による測定を短時間で開始できる。
(もっと読む)
位置決め制御装置
【課題】 上位コントローラと、該上位コントローラからの起動信号に基づいて被搬送物を搬送するサーボモータと、該サーボモータを可変速駆動するサーボアンプとを用いて形成される位置決め制御装置の省配線を図る。
【解決手段】 フィルム1をローラ2で一定量だけ定寸送りしつつ、カッター4で裁断するときに、ローラ2を駆動するサーボモータ11を可変速制御するサーボアンプ40を位置指令生成部41、移動量メモリ部42、位置・速度・電流制御部43、位置ラッチ部44、状態監視フラグ部45、位置決め完了判定部46で形成することにより、フィルム1上に印刷されたマーク1a,1b,・・・をその都度通過したタイミングで発生する信号がオンされると状態監視フラグ部45の状態監視フラグをセットし、この状態監視フラグの状態を上位コントローラ31に出力する。
(もっと読む)
同期制御装置
【課題】 複数のモータで同一方向の座標軸を駆動する機械に対して、汎用的な電機品を用いて各軸間相互に加わる無効反力を抑制すると共に、作業位置に対する同期制御を高精度に行なう同期制御装置を提供する。
【解決手段】 位置指令121を生成する位置指令生成部21と、2台の位置情報131,141に基づいてXY軸座標系である作業位置122を演算し、位置指令121と作業位置の一方の軸座標系位置122との差に基づいて新たな位置指令125を演算する第1の位置制御系を有する指令装置2と、新たな位置指令125と位置情報131,141との差に基づいてモータを駆動する指令を演算する第2の位置制御系をそれぞれ有する2台のモータ制御装置3,4と、を備える。
(もっと読む)
並列スライダ装置の制御装置および制御方法および測定装置
【課題】並列スライダ装置において、二つのスライダが相互に干渉することなくスムーズな動きをもって移動することを実現すること。
【解決手段】
前側リニアサーボモータ72のための前側サーボコントローラ110と後側リニアサーボモータ80のための後側サーボコントローラ130とに互いに同一の位置指令を与える一方で、前側リニアサーボモータ72は比例要素と少なくとも積分要素と微分要素の何れか一方を含むPI制御あるいはPD制御あるいはPID制御を行い、後側サーボコントローラ130は比例要素のみを含むP制御を行い、前側サーボコントローラ110と後側サーボコントローラ130とで制御ゲインを互いに相違させる。
(もっと読む)
工作機械の送り駆動系の制御方法及び制御装置
【課題】象限突起の補正量を運転状況に応じて適正に定めるとともに、補正のタイミングや補正形状のズレを極小にし、象限突起の補償を十分に行う。
【解決手段】送り駆動系の制御方法は、サーボモータにより送り運動される移動体の位置検出信号と位置指令信号とが一致するように速度指令信号を生成し、サーボモータの速度検出信号と速度指令信号とが一致するように駆動力信号を生成し、この駆動力信号に基づいてサーボモータの駆動力を制御する。位置指令信号を先読みし、位置及び送り速度から送り駆動系に作用する摩擦力を推定する摩擦力推定工程21と、位置指令信号の入力から実際に移動体位置が駆動されるまでの制御系をモデル化し、このモデルの摩擦力と位置指令との関係から、上記摩擦力推定工程で推定した摩擦力に相当する補正指令を算出し、この補正指令を位置指令に加算して摩擦力の補償を行う摩擦力補償工程22とを備える。
(もっと読む)
駆動装置、駆動方法、及び装置
【課題】簡易な構成でありながら位置決め精度を高められる駆動装置、駆動方法、及び装置を提供する。
【解決手段】駆動装置(1a)は、回転駆動する駆動部(10)と、駆動部(10)の駆動出力軸の回転角度位置を検出し第1の位置情報を生成する第1の位置検出器(31)と、駆動部(10)の駆動出力軸に接続された減速機(20)と、減速機(20)の減速出力軸の回転角度位置を検出し第2の位置情報を生成する第2の位置検出器(32)と、第1の位置情報と前記第2の位置情報とを選択的に用いて駆動部(10)を制御する制御部(100a)と、を備える。
(もっと読む)
位置制御装置
【課題】 制御対象機械を目標位置へ移動させて停止させるための位置制御装置において、オーバーシュートの抑制とサイクルタイムの短縮を可能にする。
【解決手段】 フィードフォワード制御ブロック27aは位置指令ブロック21からの前記位置指令値に対して、フィードフォワード設定手段41で設定し出力されるフィードフォワードゲインを乗じた値を、新たな補正量として出力する機能を有し、この位置制御装置40が位置決め制御動作を開始すると、フィードフォワード設定手段41では、位置指令ブロック21からのパルス列形式の位置指令値に含まれるパルス周波数の変化に基づく速度指令演算値を求めつつその変化を監視し、この速度指令演算値が予め定めた切換設定値より小さいときにはフィードフォワード制御ブロック27aへのフィードフォワードゲインのより小さく設定することにより、位置決め終了時のオーバーシュートの抑制と位置決め開始から終了までのサイクルタイムの短縮とを可能にしている。
(もっと読む)
サーボの軌跡追従の位置決め調整方法及びその制御装置
【課題】 速度制御や位置制御調整後、円弧半径縮小量、最大速度と位置制御ゲインより最大速度フィードフォワードゲインを設定し、最大速度でオーバシュートしない範囲で速度フィードフォワードゲインを調整することができる、サーボ制御装置の軌跡追従の位置決め調整方法を、提供する。
【解決手段】 円弧半径縮小量と最大送り速度に基づいて位置追従遅れ量を算出する追従遅れ算出部と、前記位置追従遅れ量に基づいて最大フィードフォワードゲインを算出する最大フィードフォワードゲイン設定部と、前記追従遅れ量と最大フィードフォワードゲインに基づいて最大移動速度でフィードフォワードゲインを調整するフィードフォワードゲイン調整部と、を備えた。
(もっと読む)
サーボ制御装置
【課題】位置制御の精度向上を実現すること。
【解決手段】モータの回転運動を直線運動に変換するねじ送り部と、ねじ送り部によって直線移動させられる被駆動部と、ねじ送り部及び被駆動部が支持される支持体とを備える数値制御機器に適用され、被駆動部の位置を位置指令に一致させるようにモータを制御するサーボ制御装置であって、支持体の振動反力による被駆動部の振動を補償する支持体反力補償部311を備え、支持体反力補償部311が備える伝達関数には、被駆動部の剛性項が含まれているサーボ制御装置を提供する。
(もっと読む)
1 - 20 / 81
[ Back to top ]