
Fターム[5H501BB05]の内容
Fターム[5H501BB05]に分類される特許
1 - 20 / 274
モータ制御装置
電動機制御装置
回転力発生装置
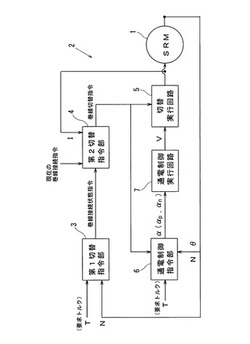
【課題】相巻線における巻線の接続状態を切り替えても、トルク波形の変動が生じない回転力発生装置を提供する。
【解決手段】トルクTと回転数Nを用いて相巻線の「直列接続→並列接続」または「並列接続→直列接続」の切替えを実施する際に、相巻線の通電状態が非通電のタイミングで切替えを実施するとともに、相巻線の電流波形を制御して切替え直前と直後のトルク波形を略同一波形に揃える。これにより、SRモータ1は、広い運転領域において高出力を得ることができるとともに、相巻線の通電中に巻線組の切替えが実施されることで生じるトルク変動を回避でき、さらに、巻線組の切替えが行われて巻線組のインダクタンスが変化することによるトルク波形の変動も回避することができる。
(もっと読む)
制振制御装置

【課題】フィルタへの余剰トルク成分の蓄積を抑制する制振制御装置を提供する。
【解決手段】車両に設けられたモータを制振させる制振制御装置において、車両の車両情報を入力として、車両へのトルク入力と前記モータの回転速度の理想伝達特性のモデルGm(s)と、車両へのトルク入力とモータの回転速度の実伝達特性のモデルGp(s)とを用いたモデルGm(s)/Gp(s)を含むフィルタにより第1トルク目標値を算出する第1トルク目標値算出手段と、モータの回転速度を検出するモータ回転速度検出手段と、モデルGp(s)を含むフィルタを用いて、トルク指令値及び回転速度検出手段により検出された検出回転速度に基づいて、第2トルク目標値を算出する第2トルク目標値算出手段と、第1トルク目標値と前記第2トルク目標値とを加算してトルク指令値を算出する加算手段と、トルク指令値に基づいて、モータを制御するモータ制御手段とを備える。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、予め設定されたPWM条件下で電流フィードバックを用いるPWM制御方式でインバータ16を制御する制御部18とを含む。制御部18は、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、PWM制御で電流フィードバックを行う場合のフィードバックゲインを、通常時に使用する通常時ゲインよりも低下させるゲイン低下部であるゲイン決定部30を有する。
(もっと読む)
モータ制御装置
【課題】電流指令値が0(モータ停止)の場合に、出力電流ノイズに起因するモータの振動を抑制する。
【解決手段】モータに流れる電流値とモータの電気角と電流指令値とが入力され、それら電流指令値、電流値及び電気角を用いたフィードバック制御を行うことにより電圧指令値を算出し、その電圧指令値をPWM波形に変換してモータを駆動するインバータを制御するモータ制御信号を生成するモータ制御装置において、電流指令値が0か否かを検知する0指令検知部61を備え、0指令検知部61が0を検知した時、電圧指令値が入力されてモータ制御信号を生成するPWM変換部18’における電圧指令値に対する分解能を粗くする。
(もっと読む)
位置決め制御装置
【課題】精密測定装置に振動等が発生した場合に位置決め制御装置の制御ゲインを調整する際、その調整時間の短縮化、及び、ゲイン調整に掛かる労力の軽減化を図ること。
【解決手段】位置決め制御装置100は、位置補償部10、速度補償部20、電流補償部30、設定テーブル40及びゲイン選択手段50を有する。位置補償部10は目標位置及び検出位置の位置偏差を得て、これに基づき目標速度を制御する。速度補償部20は、目標速度及び検出速度の速度偏差を得て、これに比例ゲインKpを掛けた値及び速度偏差の積分に積分ゲインKiを掛けた値の加算値をモータの目標電流として出力する。電流補償部30は、目標電流及びモータの検出電流の電流偏差を得て、これに基づいて駆動電流を制御する。ゲインKp、Kiの設定値の組合せが複数通り設定テーブル40に記憶されており、選択手段50で選択された組合せに各ゲインが書き換えられるようになっている。
(もっと読む)
制振制御装置及び制振制御方法
【課題】制御ループの高い安定性を確保することができる制振制御装置を提供する。
【解決手段】車両に設けられたモータを制振させる制振制御装置において、第1フィルタを用いて、車両の車両情報に基づいて、第1トルク目標値を設定する第1トルク目標値設定手段と、モータの回転速度を検出するモータ回転速度検出手段と、第2フィルタを用いて、モータ回転速度検出手段により検出された検出回転速度に基づいて、第2トルク目標値を設定する第2トルク目標値設定手段と、第1トルク目標値設定手段により設定された第1トルク目標値と、第2トルク目標値設定手段により設定された第2トルク目標値とを加算して、トルク指令値を算出する第1加算手段と、第1加算手段により算出されたトルク指令値に基づき、モータを制御するモータ制御手段とを備え、第2フィルタの制御定数は、車両の駆動系の固有振動周波数より低い周波数に基づいて設定されている。
(もっと読む)
車両用駆動制御装置
【課題】駆動系の機械共振を適切に抑制する。
【解決手段】アクセル開度および速度に基づく要求駆動力に応じて走行用モータに対するトルク指令を出力するトルク指令生成部41と、トルク伝達系の固有振動周波数成分を減衰させるようにして、トルク指令に減衰フィルタ処理を行なって処理後のトルク指令を出力するトルク指令ノッチフィルタ42と、処理後のトルク指令に応じたトルクを発生させるように走行用モータを制御する動力指示部と、調整パラメータ演算部43とを備え、調整パラメータ演算部43は、走行用モータの回転数が所定回転数以下かつトルクが所定トルク以上である場合にトルク指令ノッチフィルタ42の減衰フィルタ処理の減衰特性を同定する。
(もっと読む)
制御装置
【課題】外乱成分による制御信号の変動を抑制できるとともに、当該制御信号の変動抑制によるフィードバック制御系の応答特性の変動を抑制できる制御装置が求められる。
【解決手段】制御対象の出力が目標値に近づくように制御信号を変化させるフィードバック制御部を備えた制御装置であって、目標値に対して目標値応答予測部の処理を行って第一演算値を算出し、出力に対してノイズ除去フィルタ処理を行って第二演算値を算出し、目標値に対して目標値応答予測部及びノイズ除去フィルタの処理を行って第三演算値を算出し、第二演算値に第一演算値を加算し第三演算値を減算した制御用出力値を算出する処理と数学的に等価な処理を行い、制御用出力値を制御対象の出力として前記フィードバック制御部に入力する制御装置。
(もっと読む)
制御装置および制御方法、並びにプログラム
【課題】新たなハードウェアを必要とせず、タクトタイムを変化させることなく、振動を抑制する。
【解決手段】パラメータ生成部102は、基準距離について、予め定めた移動時間毎に、可動部の加速度軌道から共振周波数に対応する周波数成分を除いた軌道を計算するためのパラメータを生成する。データベース103は、パラメータ生成部102から供給されたパラメータを記憶する。パラメータ決定部104は、可動部の加速度軌道から共振周波数に対応する周波数成分を除いた軌道を計算するためのパラメータを決定する。軌道計算部105は、決定されたパラメータから軌道を計算する。本発明は、ロボットを制御する制御装置に適用できる。
(もっと読む)
駆動制御装置、画像形成装置、駆動制御方法及びプログラム
【課題】起動時において、機構のバックラッシュ等のギヤの噛合いで生じる衝撃によってエンコーダ等の検出系が加振され、機構の速度や位置が誤検出された場合であっても、フィードバック制御系が安定となるような駆動制御装置、画像形成装置、駆動制御方法及びプログラムを提供すること。
【解決手段】電動機と、前記電動機の出力を伝達する伝達機構部と、前記伝達機構部に連結することで前記電動機の出力により駆動される従動機構部と、前記電動機、前記伝達機構部又は前記従動機構部のいずれか1つの速度又は位置を検出する検出部と、前記検出部の出力値と目標値との偏差の値に基づき、補償器を用いて所定の演算を行う補償器演算部と、前記補償器演算部の結果に基づいて前記電動機を駆動させる電動機駆動部と、を有する駆動制御装置であって、前記補償器演算部に入力する前記偏差の値に制限をかける偏差制限部を有する駆動制御装置によって解決される。
(もっと読む)
電動機の駆動装置
【課題】簡便な手法で機械軸系の捩じり振動を抑制することができる電動機の駆動装置を提供する。
【解決手段】機械負荷1を駆動する電動機2に対する速度基準と電動機2の実速度との偏差がなくなるように、電動機2のトルク基準を得て、電動機2に対するトルク信号を出力する制御部4、を備え、制御部4は、電動機2と機械負荷1とで構成される機械軸系で発生する捩じり振動に対するトルク信号の位相遅れが90度未満となるように設定されるようにした。
(もっと読む)
モータの制御装置、及びモータの制御方法
【課題】モータ内におけるロータの位置を推定せずに、コンプレッサの振動及び騒音を低減できるモータの制御装置及びモータの制御方法を提供する。
【解決手段】制御装置は、周期的に変動する負荷トルクを有する負荷を駆動するモータを指令回転数で動作させるように制御するモータの制御装置であって、前記モータを駆動する駆動部と、前記駆動部により前記モータを駆動する際にモータ巻線に流す相電流を検出する検出部と、前記検出部により検出された相電流に応じた値の変動成分を抽出する抽出部と、前記抽出部により抽出された前記値の変動成分に基づいて、前記負荷トルクの変動特性を推定する推定部と、前記推定部により推定された負荷トルクの変動特性を用いて、前記駆動部の制御信号を生成する制御部とを備え、前記駆動部は、前記制御部により生成された制御信号に従って、前記モータを駆動する。
(もっと読む)
車両用モータ制御装置
【課題】車両の共振周波数を解消できる車両用モータ制御装置を提供する。
【解決手段】各種センサ7からの車両の状態量に応じて第1のトルク指令値Trefを生成する車両制御装置1と、走行用モータ3の電気角ωから検知できるトルクリプル成分の中で車両共振を発生させる周波数成分を車両共振成分抽出フィルタ24で抽出し、その周波数成分に対してフィードバック制御を行うための共振補償値である第2のトルク指令値Tcmpを生成する車両共振補償演算部23と、第1のトルク指令値Trefから第2のトルク指令値Tcmpを減算してトルク指令値Tref_cmpを生成する加算器20とを備え、当該トルク指令値により走行用モータ3を制御する。これにより、走行用モータ3のトルクリプルによる車両の共振が抑制できる。
(もっと読む)
制御装置
【課題】回転電機の応答遅れが伝達トルク振動の周波数に対して無視できない領域においても、十分な制振効果が得られる制御装置が求められる。
【解決手段】伝達トルク振動を打ち消すトルクを回転電機に出力させる制御装置であって、回転速度振動を抽出する回転振動抽出部と、トルク振動周波数を算出する振動周波数算出部と、位相遅れ回転速度振動を算出する位相遅れ回転振動算出部と、回転速度振動及び位相遅れ回転速度振動を固定座標系で表す固定座標系設定部と、回転速度振動及び位相遅れ回転速度振動を回転座標変換する回転座標変換部と、フィードバック値を算出する回転座標系フィードバック制御部と、フィードバック値を固定座標変換する固定座標変換部と、打消トルク振動の指令値を生成する打消トルク制御部と、を備える。
(もっと読む)
モータ制御装置
【課題】動作中に振動特性が変化する制御対象に対する振動抑制制御の精度を向上できるモータ制御装置を得ること。
【解決手段】モータ1a及び振動可能要素1bを有する制御対象1の動作を制御して、制御対象の動作を動作目標値に追従するようにモデルトルクτaを生成するフィードフォワード制御部111と、モデルトルクに応じてトルク指令τMを発生させる発生部とを備え、フィードフォワード制御部は、制御対象の振動関連情報に応じて、振動特性を表す振動パラメータθを生成する生成部と、振動パラメータに応じて、動特性を模擬した数式モデル121を変更し、モデルトルクから変更された数式モデルにより、制御対象の動作状態を含むモデル変数を演算する第1の演算部と、モデル変数が一定の追従特性で動作目標値に追従するように、振動パラメータに応じて特性を変化させた演算によりモデルトルクを演算する第2の演算部とを有する。
(もっと読む)
ピンチロールの速度制御装置及び速度制御システム
【課題】ピンチロールの速度制御において、操業中にピンチロールモータの速度制御系の不安定化によるハンチングを抑制することを目的とする。
【解決手段】ピンチロールの速度目標値と張力バランス目標値とを入力信号とし、第1のPI制御器を用いてピンチロールの補正速度目標値を出力する主幹制御部と、該補正速度目標値とピンチロールの速度実績値との第1の差分値を求め、該差分値を入力として第2のPI制御器によりピンチロールモータを駆動する電流指令値を求めるドライブ部とを具備し、主幹制御部は、張力バランス目標値と電流指令値との第2の差分値を求め、該第2の差分値を第1のPI制御器に入力し、その出力をローパスフィルタに入力し、該ローパスフィルタの出力と速度目標値とから補正速度目標値を出力する。
(もっと読む)
指令発生装置の設計方法、指令発生装置の製造方法、指令発生方法、指令発生装置、モータ制御装置の製造方法、及びモータ制御装置
【課題】少ない演算量で機械の振動を抑制することが可能な指令発生装置の設計方法、指令発生装置の製造方法、指令発生方法、指令発生装置、モータ制御装置の製造方法、及びモータ制御装置を提供する。
【解決手段】指令発生装置20の設計方法は、関数a(t)を設定するステップと、関数a(t)をラプラス変換して関数A(s)を求めるステップと、極を定める減衰係数がそれぞれ0、かつ極を定める固有角周波数が、それぞれ関数a(t)に含まれるパワーが0の異なる周波数ωsであり、零点が、それぞれ複数の振動成分をもつシステムの各振動極であり、定常ゲインがそれぞれ1となる複数の2次の伝達関数G1(s)〜Gn(s)(nは自然数)を設定するステップと、関数A(s)と伝達関数G1(s)〜Gn(s)とを乗じて関数Fb(s)を求めるステップと、関数Fb(s)を逆ラプラス変換して関数fb(t)を求めるステップとを含む。
(もっと読む)
電動ポンプ装置
【課題】起動してから素早く必要な油圧を発生させることができるとともに、安定して油圧を供給することのできる電動ポンプ装置を提供する。
【解決手段】マイコン22は、モータ13の回転状態を維持することにより必要な油圧が変速機構に供給される安定状態であるか否かを判定し、安定状態である場合に電流フィードバック制御のゲインKを、起動状態で設定される高応答ゲインよりも小さな低応答ゲインに変更するPIゲイン設定部51を備えた。
(もっと読む)
1 - 20 / 274
[ Back to top ]