
Fターム[5H501DD10]の内容
Fターム[5H501DD10]に分類される特許
1 - 20 / 50
球面モータの制御装置および球面モータの制御方法
【課題】3自由度以上の回転が可能な球面モータの動作制御を直感的に把握し易い状態で行う。
【解決手段】任意の方向に回転が可能な概球回転体の運動に係る信号出力に基づき、球面モータ300のロータを動作させるために、球面モータ300の界磁コイル309への通電パターンを生成する界磁コイル通電パターン生成部201と、前記通電パターンに基づく駆動信号を出力する駆動信号出力部202とを備える。
(もっと読む)
電力変換装置

【課題】新たな部品を追加することなくモータの巻線間のサージ電圧を抑えられる電力変換装置を提供する。
【解決手段】インバータ回路10の浮遊容量C11と、インバータ回路10とモータM1を接続する配線の寄生インダクタンスL10と、モータM1の巻線のインダクタンスLm1と、モータM1の浮遊容量C10とによって構成されるLC共振回路の共振周波数が、インバータ回路10の出力可能な周波数のうち、所定周波数範囲以外の周波数となるように、寄生インダクタンスL10及び浮遊容量C11の少なくともいずれかが調整されている。寄生インダクタンスL10と、浮遊容量C10を利用して、従来のようなフィルタ回路を構成する。そのため、新たな部品を追加することなくコモンモード電流を抑えることができる。しかも、LC共振回路の共振によるコモンモード電流の増大を抑えられる。従って、車両駆動用モータM1の相巻線間のサージ電圧を抑えられる。
(もっと読む)
制御装置及び撮像装置及びその制御方法
【課題】PWM駆動制御による出力不感帯においても、フィードバック制御を正確に行うことができ、手ぶれ補正処理の精度向上をより一層図ることのできる撮像装置を提供する。
【解決手段】本発明の撮像装置は、撮像素子101を有して撮影光軸に直交する方向にモータにより可動される可動部1251と、撮像素子の位置を検出値として検出する位置検出部1252と、手ぶれによる撮像装置本体の振れ量に対応する目標値を検出する目標値算出部1241と、PWM駆動制御を用いてフィードバック制御を行うために検出値と目標値との差を演算してデューティ比を求める演算部1043と、モータ1255にデューティ比に応じた電流を流すことにより可動部1251を駆動する駆動部1254とを有する。演算部1043には、検出値と目標値との差により求められたデューティ比を補正することにより出力不感帯を除去する補正部1043Hが設けられている。
(もっと読む)
電動機器のシステム設計支援装置
【課題】総合的に電動機器全体のシステムの設計を行なうことが難しい。
【解決手段】システム設計支援装置は、解析手段10と、プログラム実行手段20と、記憶手段30と、入力手段40と、動作結果と設計要素を選択的に一覧表示する表示手段50と、システム設計モデルを有機的に結合させるモデル結合手段60と、設計要素を調整または変更する変更手段70と、を備える。解析手段10は、リニアモータ6の変動推力Frを減じた推力Fmを演算する推力演算手段11と、変位δを減じた検出位置Xiと検出速度Viとを演算する移動量演算手段12と、位置と速度の誤差を補正した移動指令に従う制御量Hcを演算する制御量演算手段13と、制御量Hcに対応する電流振動Irを減じた駆動電流Iiを演算する駆動電流演算手段14と、指令位置Pjと指令速度Vjを演算する指令値演算手段15と、を含んでなる。
(もっと読む)
制御装置
【課題】回転電機の応答遅れが伝達トルク振動の周波数に対して無視できない領域においても、十分な制振効果が得られる制御装置が求められる。
【解決手段】伝達トルク振動を打ち消すトルクを回転電機に出力させる制御装置であって、回転速度振動を抽出する回転振動抽出部と、トルク振動周波数を算出する振動周波数算出部と、位相遅れ回転速度振動を算出する位相遅れ回転振動算出部と、回転速度振動及び位相遅れ回転速度振動を固定座標系で表す固定座標系設定部と、回転速度振動及び位相遅れ回転速度振動を回転座標変換する回転座標変換部と、フィードバック値を算出する回転座標系フィードバック制御部と、フィードバック値を固定座標変換する固定座標変換部と、打消トルク振動の指令値を生成する打消トルク制御部と、を備える。
(もっと読む)
過負荷保護を行うモータ制御装置
【課題】多相交流モータの停止時又は低速回転時に多相交流モータの特定の相に集中的に電流が流れた場合にも過負荷保護を行うことができるモータ制御装置を提供する。
【解決手段】第1温度計算部3は、3相交流モータ8の各相の電流値及び熱モデルを用いて各相の温度を計算し、第2温度計算部4は、3相交流モータ8の全相の電流値の二乗平均値を算出し、二乗平均値及び熱モデルを用いて3相交流モータ8の全相の平均温度を計算する。第1温度判定部5は、3相交流モータ8の各相の温度の少なくとも一つが第1温度より高いか否かを判定し、第2温度判定部6は、3相交流モータ8の全相の平均温度が第2温度より高いか否かを判定する。アラーム信号生成部7は、3相交流モータ8の各相の温度の少なくとも一つが第1温度より高く又は3相交流モータ8の全相の平均温度が第2温度より高い場合、3相交流モータ8の駆動を停止するアラーム信号を生成する。
(もっと読む)
コントローラ
【課題】モータの回転バランスを向上することの可能なコントローラを提供する。
【解決手段】第1インバータ回路と第2インバータ回路とは異なる経路でモータに駆動電流を供給する。カスタムIC92は、第1インバータ回路に制御信号を出力する第1プリドライバ91、及び第2インバータ回路に制御信号を出力する第2プリドライバ98を有し、制御基板40に実装される。第1プリドライバ91と第2プリドライバ98の出力を制御する信号を出力するマイコン94は、第1インバータ回路からの距離と第2インバータ回路からの距離とが同じ中央線S上で制御基板40に実装される。マイコン94の出力端子101、カスタムIC92の入力端子103及び出力端子105と、マイコン94の出力端子102、カスタムIC92の入力端子104及び出力端子106とは中央線Sを挟んで対称に設けられる。
(もっと読む)
ドア駆動制御装置及びドア駆動制御方法
【課題】逆転暴走状態を誤認することなく正確に検出可能なドア駆動制御装置、及び、従来よりも安全性を向上させたドア駆動制御方法を提供する。
【解決手段】ドア1の駆動用のモータ2に電力を供給する電力変換器14を備え、ドア1の速度検出値と速度指令値とを用いたフィードバック制御により電力変換器14を運転し、ドア1の速度を制御するドア駆動制御装置に関する。速度検出値を用いてドアの加速度を演算する加速度演算手段と、この加速度演算手段から出力された加速度検出値と前記速度検出値とから所定時間後のドアの速度を予測し、その予測速度が正または負の第3の設定速度を超えた場合に、予測速度異常信号を出力する異常判定手段と、を備える。
(もっと読む)
車両および電流検出装置の異常判定方法
【課題】電流センサの故障を容易に検出することができ、かつ、生産コストの上昇を抑制する。
【解決手段】MG−ECUは、電流Ivを検出する2つの電流センサの検出値Iv1とIv2とが一致する場合(S100にてYES)、電流Ivおよび電流Iwの各々の最大値および最小値を計測するステップ(S102)と、電流Ivおよび電流Iwの振幅をそれぞれ算出するステップ(S104)と、電流Ivの振幅と電流Iwの振幅とが一致する場合に(S108にてYES)、第1乃至第3の電流センサが正常状態であると判定するステップ(S110)と、電流Ivの振幅と電流Iwの振幅とが一致しない場合(S108にてNO)、電流Iwを検出する電流センサが異常状態であると判定するステップ(S112)とを含む、プログラムを実行する。
(もっと読む)
自動製パン器
【課題】供給される交流電力の周波数の影響を簡易的に抑制する自動製パン器を提供する。
【解決手段】自動製パン器は、混練モータ50及び粉砕モータ60と、これらのモータを駆動するための交流電力を供給する電源部121aと、電源部121aが供給する交流電力の周波数を検知する電源周波数検知回路125と、上記のモータの駆動を制御する制御装置120と、を備える。制御装置120は、電源周波数検知手段125が検知する、電源部121aが供給する交流電力の周波数に応じて、上記のモータを駆動させる時間の長短を調整する。
(もっと読む)
モータ駆動システム及びモータシステム
【課題】モータの停止を確認する判断処理や、リレーを遮断するためのいわば割り込み動作などの処理をマイクロコンピュータユニットに担わせることなく、ドライバ内蔵型モータが実質的に回転しないときに、不要な電力をドライバ内蔵型モータに供給しない。
【解決手段】ファンモータユニット9に内蔵されたファンドライバ91には、スイッチK1が設けられた電源線L1を介して給電される。回転速度指令Vsppに応じたアナログ指令値VspがDA変換回路8から出力される。アナログ指令値Vspが所定値Vspb未満のときに、電圧制御回路10はスイッチK1を非導通とする。
(もっと読む)
車両用電子制御装置
【課題】制御用CPUのリセット復帰時に、監視用CPUが制御用CPUの異常を再度検知するまでの期間においては制御用CPUによってモータジェネレータ10の制御量についての異常な処理がなされるおそれがあり、制御量の制御の信頼性が低下すること。
【解決手段】制御用マイコン30は、インバータ12の操作信号MSを遮断回路72を介してインバータ12に出力する。遮断回路72は、監視用マイコン40からの禁止信号proによって遮断される。監視用マイコン40は、制御用マイコン30が正常であることを確認するまで禁止信号proを出力する。禁止信号proは、論理「L」信号であり、これが出力される信号線L3は抵抗体64を介してプルダウンされている。これにより、監視用マイコン40がリセットされる期間においても遮断回路72によって操作信号MSが遮断される。
(もっと読む)
リニアソレノイド制御装置
【課題】定常状態以外でも良好にコイルの抵抗値が推定でき、高いロバスト性を有してリニアソレノイドのフィードバック制御を実施する。
【解決手段】リニアソレノイドに印加する駆動電流の目標値である目標電流Irを調整する目標値フィルタ11を通過後の目標電流と実際の駆動電流の検出値である検出電流Ifbとの偏差を積分演算部13において積分補償し、比例微分演算部14において検出電流Ifbを比例補償すると共に微分補償し、抵抗値推定部15において駆動電流の推定値と検出電流Ifbとの偏差に抵抗値推定パラメータRを乗じて積分補償してコイルの抵抗値を推定し、積分演算部13及び比例微分演算部14の演算結果の偏差に基づいて基本電圧指令を演算すると共に、推定されたコイルの抵抗値に基づいて基本電圧指令を補正して電圧指令Vrを演算する。
(もっと読む)
モータ駆動装置
【課題】磁極位置検出手段の情報を簡単に確認する方法を提供する。
【解決手段】磁極位置情報を出力する磁極位置検出手段と、磁極位置情報から磁極位置表示データ情報を出力する表示データ作成手段と、前記磁極位置表示データ情報を表示するデータ表示手段とを有することを特徴としたモータ駆動装置とする。
(もっと読む)
整流器ベースのねじれモード減衰システムおよび方法
モータドライブ制御装置、モータドライブ制御方法
【課題】 モータドライブ装置の移動子の位置情報の再現性を維持しつつ、速度リップルを低減することができるモータドライブ制御装置、モータドライブ制御方法を提供する。
【解決手段】 モータドライブ装置における移動子より出力される位相のずれた2つの正弦波状信号に基づくリサージュ曲線に近似する楕円を示す楕円パラメータを算出する楕円算出部と、前記楕円パラメータにより示される楕円が真円となるように前記2つの正弦波状信号を補正する補正部と、前記補正された2つの正弦波状信号に基づくリサージュ曲線を前記移動子の移動速度を示す速度情報に変換する変換部と、前記速度情報とに基づいて、前記モータドライブ装置を制御する制御部とを有する。
(もっと読む)
モータ駆動回路、ステージ装置および露光装置
【課題】回路設計が柔軟にでき、かつ高精度な定電流を出力するモータ駆動回路を提供することを課題とする。
【解決手段】入力端子61に印加された指令電圧を電流に変換し前記電流をモータへ供給する電流出力段63と、モータの負荷65と直列に接続されている抵抗であって、該抵抗のうち少なくとも1つの抵抗の温度係数が他のいずれかの抵抗の温度係数と異なっている複数の抵抗641から64nと、複数の抵抗641から64nそれぞれの両端にかかる各電圧に基づく電圧を入力端子61に負帰還させてモータの負荷65に供給する電流を制御する負帰還回路とを有する。
(もっと読む)
モータ制御方法およびモータ制御装置
【課題】円滑で正確な位置決めを行うことができるモータ制御方法およびモータ制御装置を提供する。
【解決手段】 誤差補償後位置検出値と前記位置検出値との差分である誤差補償関数として、前記位置指令値を等速変化させる条件下において前記位置指令値と前記誤差補償後位置検出値との差分を最小化するような、前記検出誤差に対応する周期性をもつ関数を求める。また、求められた前記誤差補償関数を適用して、前記誤差補償後位置検出値を前記位置指令値に一致させるように前記モータの位置制御を実行する。
(もっと読む)
位置決め装置の同期防振制御装置
【課題】モータ軸と負荷間をボールねじやタイミングベルト等の負荷位置によりバネ定数が大きく変化する機構で接続した位置決め装置に負荷側外乱オブザーバを適用した場合においても、バネ定数の変化の影響を受けない精度の高い負荷側外乱の推定を可能とし、外乱に対する高いロバスト性を持たせて、振動抑制と同期制御を実現可能する。
【解決手段】モータ軸と負荷間を弾性体で接続した、負荷位置によりバネ定数Kfが大きく変化する位置決め装置において、負荷側の軸ねじれ角を測定し、軸ねじれ角と負荷の加速度に基づいて構成した負荷側外乱オブザーバ40にて推定した負荷側の外乱を、負荷側外乱から位置指令値までの逆システム50を通してフィードバックする際に、負荷側外乱オブザーバ内のバネ定数ノミナル値Kfnを負荷位置により変える。
(もっと読む)
直線運動と回転運動のためのモータ
要約すると、本発明は単一モータを用いて回転運動と並進運動を可能にする装置、方法及びコンピュータプログラムに関する。直線運動と回転運動のための電気モータ102は、複数のコイル又はコイルセットを含む多相コイル配列を持つステータ104と、その回転軸の方向に沿って運動可能で、少なくとも1つの永久磁石をそれぞれ有する複数の極を持つロータ106とを有することができる。制御ユニット108は少なくとも複数のコイル又はコイルセット、ロータの回転角度、及びロータの軸方向位置に応じたパラメータに基づいて電流を決定し、決定された電流をコイル又はコイルセットに供給し得る。 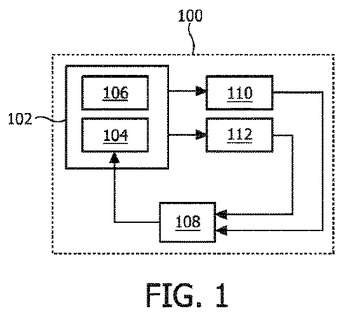 (もっと読む)
(もっと読む)
1 - 20 / 50
[ Back to top ]