
Fターム[5H501GG10]の内容
Fターム[5H501GG10]に分類される特許
1 - 20 / 54
モータ制御装置及び画像形成装置
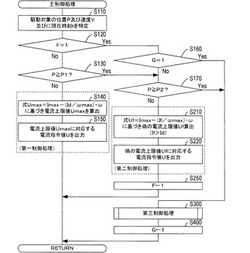
【課題】高速且つ高精度に駆動対象を目標位置に停止可能とする。
【解決手段】モータ制御ユニットは、モータに入力可能な電流上限値を推定し、この上限値に対応する駆動電流でモータを駆動する第一制御処理(S140,S150)を実行する。また、第二制御処理(S210,S220)では、電流上限値よりも小さい偽の電流上限値を、電流上限値の算出式に用いる係数を切り替えることで算出し、その偽の電流上限値に対応する駆動電流でモータを駆動する。そして、第三制御処理(S300)では、第二制御処理終了時の駆動対象の位置P及び速度Vに基づき、定速区間及び減速区間の目標プロファイルを設定し、駆動対象の位置及び速度が、目標プロファイルが示す位置及び速度を追従するように、モータに対する電流指令値を調整する。これによって第三制御処理の初期に電流指令値が電流上限値を超えないようにモータ制御を実行し、駆動対象を目標位置に停止させる。
(もっと読む)
モータ駆動装置

【課題】速度制御から位置制御への切替をシームレスに行い、機械伝達系に衝撃を与えないモータ駆動装置を提供する。
【解決手段】モータ駆動装置から前記上位コントローラ1への伝送遅れ時間の間のモータ移動量と、前記上位コントローラからモータ駆動装置への伝送遅れ時間の間のモータ移動量と、前記上位コントローラ1からモータ駆動装置への伝送遅れ時間の間のモータ移動量とを現在位置35に加算して前期の速度制御時指令位置37とし、速度制御から位置制御への切替時において、前回の前記速度制御時速度指令28から算出される位置偏差量を位置偏差24の初期値とするとともに、前記位置指令生成手段2において、前記位置偏差量を現在位置35に加算したものを位置制御時指令位置36の初期値として設定した後、前記目標位置指令21による位置制御を行うモータ駆動装置である。
(もっと読む)
モータ制御装置およびモータ制御方法
【課題】動作中の進行方向に対する振動や偏差を抑えることにより、整定時間を短くすることが可能なモータ制御装置およびモータ制御方法を提供することにある。また、本発明により、理想的な軌跡でモータを動作させることができ、さらに、現在の位置を常にモニタリングすることができるため、複数の軸を同期させて動作させることが容易となる。
【解決手段】進行方向に対する振動に大きく影響する加加速度データからの指令波形を生成する手段と、偏差量に応じて、常に加加速度制限しながら今後の指令波形を再生成するリアルタイム実位置制御を行う手段とを備え、これにより高速でモータが動作する際の進行方向に対する振動や偏差を抑える。
(もっと読む)
モータ制御回路
【課題】モータの速度を可変制御するモータ制御回路において、設定されるモータの速度に応じた適切な制御ゲインを自動的に設定可能なモータ制御回路を提供する。
【解決手段】本発明に係るモータ制御回路10は、速度検出手段FGから入力される検出信号の周期FG_countと外部から入力される基準信号EXCの周期EXC_countとの差に応じた周期誤差信号を出力する周期誤差信号出力手段20と、周期誤差信号に速度ゲインを乗算して得られる速度誤差信号を出力する速度誤差信号出力手段22と、基準信号EXCの周期EXC_countに対する補正基準周期Ref_countの比を補正量とし、その補正量を2乗して速度誤差信号出力手段22が備える所定の速度ゲインKfに乗算することにより、所定の速度ゲインKfを補正するゲイン補正手段28、30とを備えている。
(もっと読む)
自動ドア駆動制御装置
【課題】本発明は、特定の速度域において最適となるように調整された制御ゲインがその速度域以外では最適な制御ゲインとならないことに起因する速度の不安定性を解消でき、制御の応答性を向上できる自動ドア駆動制御装置を提供することを課題とする。
【解決手段】本発明による自動ドア駆動制御装置では、フィードバック速度制御部32は、自動ドアのドア体を開閉するモータ10への入力電圧20aを、速度指令43aと検出開閉速度60aとに基づいて制御することで、ドア体の開閉速度制御を行う。ゲイン変更部33は、ドア体の現在位置42aに応じてゲイン変更指令33aをフィードバック速度制御部32に入力して、フィードバック速度制御部32の開閉速度制御の制御ゲインを変更する。
(もっと読む)
撮像装置
【課題】省電力とノイズ低減とを両立する撮像装置を提供する。
【解決手段】撮像装置は、撮像素子と、撮像素子上に被写体像を形成する少なくとも1つのレンズと、制御信号に基づいて少なくとも1つのレンズを駆動するアクチュエータと、制御信号を出力するドライバであって、撮影時の被写体条件に応じて、アナログ制御信号を出力するかデジタル制御信号を出力するかを切り替えるドライバとを備えている。
(もっと読む)
モータ速度検出構造、角速度センサ付き角度センサおよびサーボシステム
【課題】 角度センサを有するサーボシステムにおいて、演算器の負荷を軽減でき、低速時の速度演算の誤差を低減でき、速度制御性にも検出精度にも優れたシステムを提供すること。
【解決手段】 モータ速度検出構造10は、モータ1の回転による角度情報を検知してモータ1の位置制御用として提供するための角度センサ2と、モータ1の回転による角速度情報を検知してモータ1の速度制御用として提供するための角速度センサ3とから構成する。角度センサ2としてはレゾルバ、角速度センサ3としてはジャイロスコープを用いることができる。ジャイロスコープはレゾルバのロータあるいはサーボの軸に取り付ければよい。
(もっと読む)
駆動装置、駆動方法、及び装置
【課題】簡易な構成でありながら位置決め精度を高められる駆動装置、駆動方法、及び装置を提供する。
【解決手段】駆動装置(1a)は、回転駆動する駆動部(10)と、駆動部(10)の駆動出力軸の回転角度位置を検出し第1の位置情報を生成する第1の位置検出器(31)と、駆動部(10)の駆動出力軸に接続された減速機(20)と、減速機(20)の減速出力軸の回転角度位置を検出し第2の位置情報を生成する第2の位置検出器(32)と、第1の位置情報と前記第2の位置情報とを選択的に用いて駆動部(10)を制御する制御部(100a)と、を備える。
(もっと読む)
装置、および、制御方法
【課題】アームの位置決め精度を向上させることができる装置を提供する。
【解決手段】少なくとも2つの駆動装置を備え、一方の駆動装置は第1のアーム部を駆動させ、他方の駆動装置は第1のアーム部に設けられて第2のアーム部を駆動させる装置であって、駆動装置は、駆動出力軸を回転駆動する駆動部と、駆動部の駆動出力軸に、減速入力軸が接続されている減速機と、駆動部の駆動出力軸の回転角度位置を検出する第1の位置検出器と、減速機の減速出力軸の回転角度位置を検出する第2の位置検出器とを備え、駆動部と減速機と第1の位置検出器と第2の位置検出器とは、一体として構成されている。
(もっと読む)
モータシステム
【課題】電流検出回路に用いられている素子のばらつきに起因する誤差を正しく補正することによって、三相関係の不平衡をなくす。
【解決手段】補正係数演算部10は、ダイナミックブレーキ抵抗回路切替部7がPWM方式三相インバータ1からダイナミックブレーキ抵抗8a,8b,8cへと経路を切り替えたときにおけるU相とV相のモータ電流の検出値に基づき、U相とV相に発生する誘起電圧を利用して、V相のモータ電流の検出値の補正係数を演算する。乗算器12は、V相のモータ電流の検出値の補正係数に基づき、V相のモータ電流の検出値を補正して、U相とV相のモータ電流の検出値のアンバランスを補正する。
(もっと読む)
モータ用位相同期回路及びそれを用いたスピンドルモータ
【課題】入力信号の周波数が変化するようなモータの駆動制御において、ステップ入力などのように入力信号の位相が急激に変化した場合でも、オーバーシュートやスリップによる振動などの過渡的な振動の発生を抑制することができる多重PLL回路の構成を得る。
【解決手段】第2PLL21の第2位相比較回路24によって検出される位相差が所定範囲外である場合には、ループ加算器26を介さずに、第1PLL11を用いて第2PLL21のモータ部22を制御する一方、上記位相差が所定範囲内である場合には、上記ループ加算器26を介して上記第1PLL11と上記第2PLL21とを接続して多重PLL回路を構成するように、信号経路切換部33によって、該第1及び第2PLL11,12の信号経路を切り換える。
(もっと読む)
電動モータユニット
【課題】 さらに小型化、コスト低減が可能な電動モータユニットを提供する。
【解決手段】 電動モータユニットは、電動モータ2を制御する電動モータ制御装置3と主制御装置4とが、正電源線8および負電源線11で接続されており、電動モータ2に対する指令信号が主制御装置4から電動モータ制御装置3に送られ、電動モータ2の状態を表す状態信号が電動モータ制御装置3から主制御装置4に送られるようになされているものである。電動モータ制御装置3と主制御装置4が、1本の共通の信号線25で接続されて、指令信号の送受信を行う指令モードおよび状態信号の送受信を行う状態モードを交互に繰り返すことにより、上記信号線25を介して上記信号の送受信を行う。
(もっと読む)
波動歯車装置の角度伝達誤差補償方法
【課題】波動歯車装置の角度伝達誤差であるモータ軸同期成分の補償を、波動歯車装置に取り付けられたモータを制御することにより行って、位置決め精度の向上と共に、位置決め応答中の動的なモータ軸同期成分が原因で発生する振動を抑制できるようにすること。
【解決手段】モータ軸位置に基づき負荷軸位置をセミクローズドループ制御により行う波動歯車装置を備えたアクチュエータ(PLANT)における角度伝達誤差補償方法において、モータ位置に同期して発生する相対回転同期成分θSyncを振動源に見立て、当該相対回転同期成分θSyncが負荷位置に与える影響を補償できるように算出した補償電流指令icompによりモータ電流指令irefを補正すると共に、相対回転同期成分の影響を補償するために算出したモータ位置補正信号θcompによりモータ位置指令rを補正する。
(もっと読む)
複数の巻線を備えたモータを駆動するモータ駆動システム
【課題】複数のインバータで駆動可能なモータ駆動システムを単純にする。
【解決手段】モータ駆動システム(10)は、位置指令を用いてPWM指令を出力する複数の軸制御部(31a〜31n)と、複数の軸制御部の各PWM指令に基づいて各巻線に電流を流すと共に、各巻線に接続された複数の電流供給部(20a〜20n)と、モータのロータ位置の信号を出力するモータ位置検出器(12)と、出力された信号を複数の電流供給部のうちの一つの電流供給部に供給する第一信号供給部(41)と、第一信号供給部を通じて供給された信号を一つの電流供給部に対応する軸制御部に供給する第二信号供給部(42)とを具備し、対応する軸制御部は、一つの電流供給部から第二信号供給部を通じて対応する軸制御部に供給された信号と位置指令とに基づいてPWM指令を出力し、残りの軸制御部は、対応する軸制御部から残りの制御軸部に供給された信号と位置指令とに基づいてPWM指令を出力する。
(もっと読む)
位置決め装置
【課題】ユーザに繁雑な作業を強いることなく高い位置決め精度を実現することができ、モータの加速度を変えても位置決め精度の悪化を招くことがない位置決め装置を提供する。
【解決手段】位置決め装置1は、平面モータ10に駆動されてXY面内で移動可能なステージ20と、平面モータ10によるステージ20の駆動を制御するモータ制御装置30とを備えており、モータ制御装置30は、ステージ20が移動している状態における平面モータ10の電流推力特性に合わせた駆動電流C1〜C3を平面モータ10に供給する。
(もっと読む)
モータ制御装置の制御パラメータ算出方法
【課題】安定で応答が滑らかでかつ制御応答性の高いモータ制御装置の制御パラメータを高速に算出する制御パラメータの算出方法及び制御パラメータ算出方法を用いたモータ制御装置を提供する。
【解決手段】第1のトルク指令入力点もしくは第2のトルク指令入力点からモータ速度出力点までの負荷周波数特性を得、負荷周波数特性を用いて算出される速度閉ループまたは位置閉ループの閉ループ周波数特性から、閉ループ周波数特性のゲインが負の所定値となる最も低い周波数ωをカットオフ周波数とする一次遅れ要素の周波数特性と、負荷周波数特性の反共振周波数および反共振周波数における深さに応じた反共振周波数特性とを減じ、減じられた閉ループ周波数特性のゲイン最大値が所定値以下になる、速度制御手段の制御パラメータである速度応答周波数を1つ以上算出し、算出された1つ以上の速度応答周波数のうち最大となる速度応答周波数を求める。
(もっと読む)
電動機制御装置と予測制御方法
【課題】機械にあわせてフィードフォワード量を調整して指令に追従させ、制御演算を簡易にして、加減速時のオーバシュートを減らし、一定速度時の追従性を高めた電動機制御装置と予測制御方法を提供する。
【解決手段】位置指令をサンプリング時間毎に保存する位置指令差分バッファ部(21)と、位置指令差分バッファ部の位置指令と電動機位置の位置偏差に基づいて速度指令を生成する予測演算部(22)とを備え、位置指令差分バッファ部は、速度フィードフォワードのみ使用する場合は2段し、トルクフィードフォワードを使用する場合は4段とした。
(もっと読む)
慣性系の制御方法および装置
【課題】運転指令に対する負荷機械の応答性を低下させることなく該負荷機械の振動を抑制すること。
【解決手段】動力発生機(37)と、この動力発生機(37)にトルク伝達要素(39)を介して結合された負荷機械(38)とを有する慣性系が制御対象である。負荷機械(38)の加速度を指令する加速度指令情報(41)に所定のゲインを乗じて制振制御操作量(43)を設定する。位置指令(42)に制振制御操作量(43)を加えて制振制御指令(44)を形成し、この制振制御指令(44)によって慣性系を制御する。
(もっと読む)
モータ制御装置
【課題】電流検出からの演算時間に起因する非干渉化制御量のずれを補償して、モータ電流を良好に制御することができるモータ制御装置を提供する。
【解決手段】このモータ制御装置は、PI演算値Vdo,Vqoを演算するためのPI演算部51a,52aと、モータの非干渉化制御のための非干渉化制御量を演算するための非干渉化制御量演算部51b,52bと、モータ電流からモータの推定電圧VEd,VEqを演算する電圧推定部51c,52cと、推定電圧VEd,VEqとPI演算値Vdo,Vqoとから補正値Cd,Cqを求める補正値演算部51d,52dと、PI演算値Vdo,Vqoに非干渉化制御量Dd,Dqおよび補正値Cd,Cqを加算して電圧指令値Vd*,Vq*を出力する補正部51e,52eとを備えている。
(もっと読む)
モータ制御装置
【課題】コストの大幅な増加を伴うことなく、回転角検出手段の故障時に正確に推定された回転角を用いてモータを適切に駆動することができるモータ制御装置を提供する。
【解決手段】レゾルバ2に故障が生じていない通常時はレゾルバ2が検出する検出回転角θSを用いてモータ1が制御される。レゾルバ2に故障が生じたときは、回転角推定部31が演算する推定回転角θEを用いてモータ1が制御される。レゾルバ2が正常なときに、検出回転角θSから求めた回転角速度ωから検出誘起電圧ESαβが演算される。また、二相電圧指令値Vαβおよび二相検出電流Iαβに基づいて推定誘起電圧EEαβが演算される。これらの比較に基づき、推定誘起電圧EEαβを補正するための補正値Cαβが生成され、補正値記憶部30に書き込まれる。回転角推定部31は、推定誘起電圧EEαβを補正値Cαβで補正し、この補正後の推定誘起電圧を用いて推定回転角θEを求める。
(もっと読む)
1 - 20 / 54
[ Back to top ]