
Fターム[5H501HA06]の内容
電動機の制御一般 (20,975) | 駆動制御回路又は電力変換回路の主要な構成 (749) | 半導体素子 (598)
Fターム[5H501HA06]の下位に属するFターム
Fターム[5H501HA06]に分類される特許
1 - 20 / 47
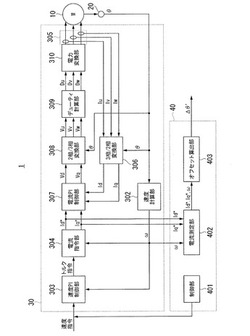
モータ制御装置、モータ制御方法
【課題】モータを精度良く制御することを可能にするモータ制御装置、及びモータ制御方法を提供する。
【解決手段】電流指令値から、電圧指令値を生成し、モータに流れる検出電流によりフィードバック制御するモータ制御装置であって、前記モータを一定速度で回転させ、一定電流量のd軸電流を流す速度指令値に基づいてモータの速度制御を行う速度PI制御部303と、モータが一定速度で回転し、一定電流量のd軸電流が流れているときの速度制御部の出力に基づく電流指令値を測定する電流測定部402と、測定された電流指令値に基づき、モータの回転位置に対する補正値を算出するオフセット算出部403と、を備える。
(もっと読む)
モータ制御装置、モータ制御方法

【課題】モータを精度良く制御することを可能にするモータ制御装置、及びモータ制御方法を提供する。
【解決手段】電流指令値から、電圧指令値を生成し、モータに流れる検出電流によりフィードバック制御するモータ制御装置であって、モータの速度制御を行う速度PI制御部303と、モータが一定速度で回転しているときの速度制御部の出力に基づく電圧指令値を測定する電圧測定部と、測定された電圧指令値に基づき、モータの回転位置に対する補正値を算出するオフセット算出部403と、を備える。
(もっと読む)
電子制御装置
【課題】駆動対象に対する外力の加わり方が異なる場合でも、噛み合わせクラッチの接続を確実に解除する。
【解決手段】電子制御装置100は、バックドアを開閉動作させるために、モータ駆動部6で電動モータ12を回転させ、電動モータ12の駆動力をバックドアに断続して伝達するために、クラッチ駆動部4で噛み合わせクラッチを接続または接続解除させ、電流検出部2で電動モータ12に流れる電流を検出する。モータ駆動部6で電動モータ12を停止させた後、電流検出部2で検出された、電動モータ12に流れた停止直前の電流値がしきい値以上である場合に、モータ駆動部6で電動モータ12を停止前の回転方向と逆方向に所定時間だけ回転させ、停止直前の電流値がしきい値未満である場合に、モータ駆動部6により電動モータ12を停止前の回転方向に所定時間だけ回転させ、かつ、クラッチ駆動部4で噛み合わせクラッチを接続解除させる。
(もっと読む)
異常検出装置
【課題】 サーボモータによって駆動される被駆動部の異常部位を特定可能な異常検出装置を提供する。
【解決手段】 本発明の異常検出装置は、サーボモータの位置情報が位置検出器から入力される入力部と、位置情報を周波数変換する周波数変換部と、周波数変換された所定周波数における振幅と被駆動部の異常を判定する閾値とを比較する比較判定部と、を有し、比較判定部は、所定周波数における振幅が被駆動部の異常を判定する閾値以上となる周波数から被駆動部の異常部位を特定する。
(もっと読む)
横磁束機械
【課題】本発明の目的は、単純で経済的なコア構造をもつ横磁束機械装置(TFMA)を提供することである。
【解決手段】このTFMAは、積層鉄板をもつコアを採用する。コアは、3D磁束通路を作るために、左斜め部及び右斜め部を有する。斜め部をもつ積層鉄コアを用いる複数の3D構造が、開示される。斜め部を使用することにより、コアはムカデのように見える。CTFMと呼ばれるこのムカデ状のTFMは複数のタイプをもつ。このCTFMのための複数のモータ構造及び複数のモータ駆動回路も開示される。
(もっと読む)
電動機の制御方法
【課題】低負荷時の効率を従来よりも向上できる電動機の制御方法を提供する。
【解決手段】要求動作点Dとなる可変の要求回転数n1および要求トルクTn1に基づき、実際の出力動作点である出力回転数および出力トルクを要求動作点に一致させるように電気入力を制御する電動機の制御方法であって、所定の単位時間tAを通して、要求回転数n1に出力回転数を継続的に一致させるとともに、要求回転数n1の条件下で要求トルクTn1を継続的に出力することによって得られる効率よりも高い効率が得られるトルク値でありかつ要求トルクTn1よりも大きい高効率トルク値(最高効率トルク値Tn1e−max)を含んで電動機が実際に出力する瞬時トルクT(t)を変遷させ、瞬時トルクT(t)の単位時間tAを通した時間平均値で求められる出力トルクが要求トルクTn1に一致するように電気入力を制御する。
(もっと読む)
電動機駆動装置
【課題】装置全体としての長寿命化を図りつつ、装置全体としての小型化を可能とする電動機駆動装置を提供する。
【解決手段】駆動部12は、横型半導体素子からなる1回路2接点式の切替素子16,17を2つ有している。第1の切替素子16は、コモン端子160を電動機11に接続し、第1の端子161および第2の端子162を電源部15に接続する。第2の切替素子17は、コモン端子170を電動機11に接続し、第1の端子171および第2の端子172を電源部15に接続する。制御部14は、各切替素子16,17において、コモン端子160,170が、第1の端子161,171および第2の端子162,172に対して択一的に接続されるように、各切替素子16,17を個別に切替制御する。
(もっと読む)
車両用モータ制御装置
【課題】車両の共振周波数を解消できる車両用モータ制御装置を提供する。
【解決手段】各種センサ7からの車両の状態量に応じて第1のトルク指令値Trefを生成する車両制御装置1と、走行用モータ3の電気角ωから検知できるトルクリプル成分の中で車両共振を発生させる周波数成分を車両共振成分抽出フィルタ24で抽出し、その周波数成分に対してフィードバック制御を行うための共振補償値である第2のトルク指令値Tcmpを生成する車両共振補償演算部23と、第1のトルク指令値Trefから第2のトルク指令値Tcmpを減算してトルク指令値Tref_cmpを生成する加算器20とを備え、当該トルク指令値により走行用モータ3を制御する。これにより、走行用モータ3のトルクリプルによる車両の共振が抑制できる。
(もっと読む)
制御装置
【課題】回転電機の応答遅れが伝達トルク振動の周波数に対して無視できない領域においても、十分な制振効果が得られる制御装置が求められる。
【解決手段】伝達トルク振動を打ち消すトルクを回転電機に出力させる制御装置であって、回転速度振動を抽出する回転振動抽出部と、トルク振動周波数を算出する振動周波数算出部と、位相遅れ回転速度振動を算出する位相遅れ回転振動算出部と、回転速度振動及び位相遅れ回転速度振動を固定座標系で表す固定座標系設定部と、回転速度振動及び位相遅れ回転速度振動を回転座標変換する回転座標変換部と、フィードバック値を算出する回転座標系フィードバック制御部と、フィードバック値を固定座標変換する固定座標変換部と、打消トルク振動の指令値を生成する打消トルク制御部と、を備える。
(もっと読む)
駆動制御装置、シート搬送装置、及び、画像形成装置
【課題】駆動対象が後退する方向の負荷がかかる環境下で、駆動対象を変位させて目標停止位置で停止させるような制御を好適に実行可能な技術を提供する。
【解決手段】用紙搬送制御部は、モータを通じて用紙搬送機構が備える搬送ローラを回転させることにより用紙搬送を実現するものであり、用紙搬送方向とは逆方向の負荷がかかる環境下で、用紙を目標停止位置に精度よく且つ高速に停止させるための構成を有する。具体的に、用紙搬送制御部は、実位置と目標位置との偏差に基づき算出された操作量に対応する駆動電流がモータに供給されるようにモータドライバにPWM信号を入力すると共に、用紙が目標停止位置を超えるまではイネーブル信号としてオン信号を入力する。一方、用紙が目標停止位置をオーバーランすると、目標停止位置に戻るまでイネーブル信号としてオフ信号を入力し、モータドライバにモータに対する電力供給を停止させる。
(もっと読む)
モータ駆動装置
【課題】平滑コンデンサを使用することなくモータの絶縁抵抗の劣化を検出する。
【解決手段】インバータ部21内の下アームスイッチング素子SW6と検出スイッチ32を接続することで、低電圧源33を起電部として、アースG、3相交流モータ4、インバータ部21の下アームスイッチング素子SW6、負側の直流バスN、検出抵抗31及びA/D変換器34の閉回路を形成でき、当該閉回路に流れる閉回路電流Icを検出抵抗31及びA/D変換器34で検出することで、3相交流モータ4の絶縁抵抗の劣化を検出できる。
(もっと読む)
モータ駆動回路
【課題】モータの駆動回路において、消費電力を少なくすることのできるモータ駆動回路を提供する。
【解決手段】このモータ駆動回路は、外部から入力される回転速度信号VSPに基づいてモータの回転速度を制御するモータドライバを備えたモータに適用される。そして、モータを駆動するとき、第1パルス信号P1と第2パルス信号P2とを形成し、第1パルス信号P1および第2パルス信号P2に基づいて電源動作信号SAを形成するとともに、この電源動作信号SAにより電源回路を動作させて、モータドライバに電力を供給する。さらに、第2パルス信号P2に基づいて回転速度信号VSPを形成し、この回転速度信号VSPをモータドライバへ出力する。
(もっと読む)
誘導電動機の制御装置及び制御方法
【課題】誘導電動機の回転速度を把握し、その回転速度よりトルク指令値を演算した後、そのトルク指令値で誘導電動機を制御することでトルクモータと同等の回転速度−トルク特性が得られるようにすることができる誘導電動機の制御装置又は制御方法を提供する
【解決手段】誘導電動機の制御装置10は、基本トルク指令値と誘導電動機106の検出速度又は速度推定部112からの推定速度とからトルク指令値を演算するトルク指令値演算部18と、トルク指令値に基づいて、トルク電流指令値を演算するトルク電流指令値演算部19とを備える。
(もっと読む)
電動機制御装置
【課題】電動機をより適正に制御する。
【解決手段】モータ10の回転数Nmが大きいほど大きな変化中回転変化量Δθofsを用いて変換器34からの理想角θidを補正して得られる補正後理想角θidmoをインバータ12のスイッチング素子のスイッチング制御に用いる。これにより、電子制御ユニット40に入力された理想角θidをそのタイミングでレゾルバ装置22から出力された検出角θdetに対応する理想角に換算することができ、モータ10をより適正に駆動制御することができる。
(もっと読む)
位置・速度センサレス制御装置
【課題】 速度推定部における推定誤差を低減し、推定ゲインを高くすることにより、応答性のよい位置・速度センサレス制御装置を提供する。
【解決手段】 実施形態に係る位置・速度センサレス制御装置は、インバータへの出力電圧指令を演算する出力電圧指令演算手段9と、前記出力電圧指令に基づきゲート信号を生成するゲート生成手段11と、交流電動機7に流れる電流を検出する検出手段6と、第1の周期を有する第1制御割り込みの各区間におけるインバータ出力電圧平均値を区間平均電圧として演算する平均電圧演算手段17と、前記検出手段6にて検出された電流値及び前記平均電圧演算手段17にて演算された区間平均電圧に基づき、前記交流電動機7の回転速度を推定する処理を、前記第1制御割り込みのタイミングで行う速度推定手段13とを具備する。
(もっと読む)
交流電動機の制御装置及び制御方法
【課題】演算負荷が小さく、かつ推定精度が高い電流推定を実現する交流電動機の制御装置を提供すること
【解決手段】所定の第一期間と第二期間の間、直線母線電流を一定間隔でそれぞれの期間において複数回検出し、各期間における検出値の積分値を要素とするベクトルに、検出が行われた瞬間のインバータの出力電圧位相の正弦関数と余弦関数の各期間における積分値を要素とする行列の逆行列を乗じることにより、無効電流及び有効電流を推定する。
本発明の望ましい実施態様によれば、交流電動機に流れる無効電流及び有効電流を、小さい演算負荷で高精度に推定することができる。
(もっと読む)
誘導電動機の制御装置及び制御方法
【課題】振動の原因となっている推定磁束の直流成分を除去し、モータの振動を低減する制御方式を実現した誘導電動機の制御装置又は制御方法を提供する。
【解決手段】誘導電動機の制御装置10は、誘導電動機106に供給される電流を、静止座標上のα相電流及びβ相電流に変換する3相/2相座標変換器108と、回転座標上のd軸成分の磁束電圧指令及びq軸成分のトルク電圧指令を、静止座標上のα相電圧指令及びβ相電圧指令に変換するdq/2相座標変換器120と、α相電流及びβ相電流と、α相電圧指令及びβ相電圧指令とを入力してα相磁束推定値及びβ相磁束推定値を算出する磁束推定器11と、α相磁束推定値及びβ相磁束推定値からオフセットを取り除くオフセット除去処理部12と、オフセット除去処理部12からのα相磁束推定値及びβ相磁束推定値を入力して誘導電動機106の速度を推定する速度推定器112と、を備える。
(もっと読む)
同期電動機の制御装置
【課題】動作回転数範囲に共振周波数があっても安定して動作することが可能な同期電動機の制御装置を得る。
【解決手段】同期電動機10の巻線に流れる少なくとも2相の電流の検出値と周波数指令の積算によって得られる位相とから求めた周波数補正量を入力として、軸共振周波数とその前後の周波数成分のみを減衰させるノッチフィルタ12を介して、新たな周波数補正量を算出するようにした。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置およびそれを備えた車両用操舵装置を提供する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差(負荷角θL)に応じたアシストトルクが発生する。一方、検出操舵トルクTを指示操舵トルクT*に近づけるように、PI制御部23によって、加算角αが生成される。加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。ゲイン変更部40は、PI制御部23の比例ゲインKPを、γ軸指示電流値Iγ*が大きいほど小さくなる特性に従って可変設定する。
(もっと読む)
モータ駆動装置
【課題】単一の電流検出手段を用いた場合でも、すべての相について、上段スイッチング素子および下段スイッチング素子のON故障を検出することが可能なモータ駆動装置を提供する。
【解決手段】駆動手段101にPWM信号を出力する制御手段102は、上段回生時異常判定手段103と、下段回生時異常判定手段104とを有する。上段回生時異常判定手段103は、上段スイッチング素子Q1、Q3、Q5がすべてON状態である上段回生状態において、電流検出抵抗Rに電流が流れた場合に、下段スイッチング素子Q2、Q4、Q6の少なくとも1つがON故障したと判定する。下段回生時異常判定手段104は、下段スイッチング素子Q2、Q4、Q6がすべてON状態である下段回生状態において、電流検出抵抗Rに電流が流れた場合に、上段スイッチング素子Q1、Q3、Q5の少なくとも1つがON故障したと判定する。
(もっと読む)
1 - 20 / 47
[ Back to top ]