
Fターム[5H501JJ02]の内容
Fターム[5H501JJ02]の下位に属するFターム
計算機を用いるもの (883)
Fターム[5H501JJ02]に分類される特許
1 - 20 / 114
モータ駆動装置
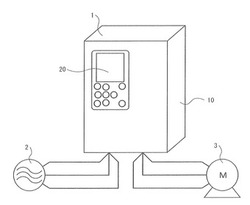
【課題】設定内容とともに設定に必要となる関連情報を同時表示する設定表示装置を用いることで簡便かつ迅速な設定を可能とするモータ駆動装置を提供する。
【解決手段】設定表示装置20によりモータ駆動に関する設定が行われるモータ駆動装置1であって、この設定表示装置20は、ある設定項目の設定内容を変更する際に、設定項目の設定内容を表示し、さらに設定項目に関連する少なくとも1以上の関連項目の関連情報を表示するようにした。
(もっと読む)
電動機器のシステム設計支援装置

【課題】総合的に電動機器全体のシステムの設計を行なうことが難しい。
【解決手段】システム設計支援装置は、解析手段10と、プログラム実行手段20と、記憶手段30と、入力手段40と、動作結果と設計要素を選択的に一覧表示する表示手段50と、システム設計モデルを有機的に結合させるモデル結合手段60と、設計要素を調整または変更する変更手段70と、を備える。解析手段10は、リニアモータ6の変動推力Frを減じた推力Fmを演算する推力演算手段11と、変位δを減じた検出位置Xiと検出速度Viとを演算する移動量演算手段12と、位置と速度の誤差を補正した移動指令に従う制御量Hcを演算する制御量演算手段13と、制御量Hcに対応する電流振動Irを減じた駆動電流Iiを演算する駆動電流演算手段14と、指令位置Pjと指令速度Vjを演算する指令値演算手段15と、を含んでなる。
(もっと読む)
駆動装置
【課題】モータの回転動力を作動部に伝達する駆動伝達機構の不具合を装置自身で解消し得るようにする。
【解決手段】演算・制御部11は、動力伝達機構4に不具合が生じたときに動力伝達機構4に衝撃を与えてその不具合を解消するための振動手段16を備えている。振動手段16はモータ6の駆動を開始してから所定時間内にエンコーダ8のカウント数が収束状態にならないときに振動動作を実行するよう構成されている。
(もっと読む)
パルス生成回路及びモータ装置
【課題】大規模なメモリを用いることなく、かつ、MPUの処理の負荷を低減できるパルス生成回路を提供する。
【解決手段】本発明に係るパルス生成回路は、MPU101からの指示に応じて、モータの回転速度をS字曲線制御するためのパルス信号112を生成するパルス生成回路100であって、MPU101から供給される、S字曲線の特性を示すパラメータ110を用いて、モータの回転速度をS字曲線制御するための、パルス信号112を変化させるタイミングを示すパルス特性111を所定の区間ごとに算出するS字曲線演算回路106と、パルス特性111を保持する特性レジスタ103と、特性レジスタ103に保持されるパルス特性111で示されるタイミングで変化するパルス信号112を生成するパルス出力回路107とを備える。
(もっと読む)
モータ制御装置
【課題】
エンコーダの分解能が高くなり、出力されたデジタル信号の周波数が高くなったときにも誤動作を起こさないモータ制御装置を提供することを目的とする。
【解決手段】
複数段のDフリップフロップから構成されており、各Dフリップフロップの出力のHレベルの数に応じて出力を決定しノイズを除去することができるデジタルフィルタを備える。これによりエンコーダの分解能が高くなり、出力されたデジタル信号の周波数が高くなった場合にもノイズが効果的に除去可能であり、誤動作が起こりにくいモータ制御装置を提供することができる。
(もっと読む)
指令発生装置の設計方法、指令発生装置の製造方法、指令発生方法、指令発生装置、モータ制御装置の製造方法、及びモータ制御装置
【課題】少ない演算量で機械の振動を抑制することが可能な指令発生装置の設計方法、指令発生装置の製造方法、指令発生方法、指令発生装置、モータ制御装置の製造方法、及びモータ制御装置を提供する。
【解決手段】指令発生装置20の設計方法は、関数a(t)を設定するステップと、関数a(t)をラプラス変換して関数A(s)を求めるステップと、極を定める減衰係数がそれぞれ0、かつ極を定める固有角周波数が、それぞれ関数a(t)に含まれるパワーが0の異なる周波数ωsであり、零点が、それぞれ複数の振動成分をもつシステムの各振動極であり、定常ゲインがそれぞれ1となる複数の2次の伝達関数G1(s)〜Gn(s)(nは自然数)を設定するステップと、関数A(s)と伝達関数G1(s)〜Gn(s)とを乗じて関数Fb(s)を求めるステップと、関数Fb(s)を逆ラプラス変換して関数fb(t)を求めるステップとを含む。
(もっと読む)
アクチュエータ駆動装置
【課題】高精度なフルデジタル制御のアクチュエータ駆動装置を提供する。
【解決手段】アクチュエータ駆動装置は、フィードバックされたデジタル信号でトルク指令デジタル信号の位相補償を行うデジタルフィルタ(10)と、デジタルフィルタの出力に応じて、パルス幅変調された複数のPWM制御信号を生成するデジタルPWM生成部(11)と、複数のPWM制御信号に応じて第1および第2の端子電圧を切り替えて出力するHブリッジ部(12)と、第1および第2の端子電圧をそれぞれA/D変換する第1および第2の連続時間ΔΣA/D変換器(13)と、第1および第2の連続時間ΔΣA/D変換器の出力のデシメーション処理をしてデジタルフィルタにデジタル信号をフィードバックするフィードバックフィルタ(14)とを備えている。
(もっと読む)
モータ制御装置、モータ制御方法、プログラム
【課題】 装置やモータの起動直後など、パルス信号の1周期の区間が検出されるまでは精度の良い速度情報を取得することができなかった。一方で、常に1/4周期のパルス信号に基づいて速度情報を得ようとすると、パルス信号に劣化が生じたときに算出される速度情報の精度が良くないため、あまり好ましくない。
【解決手段】エンコーダの両相両エッジをカウントし、1周期に満たない際はカウント値に応じて補間演算を行うことで駆動速度を取得して、高精度なモータ制御を可能とする。
(もっと読む)
モータ制御回路
【課題】モータの速度を可変制御するモータ制御回路において、設定されるモータの速度に応じた適切な制御ゲインを自動的に設定可能なモータ制御回路を提供する。
【解決手段】本発明に係るモータ制御回路10は、速度検出手段FGから入力される検出信号の周期FG_countと外部から入力される基準信号EXCの周期EXC_countとの差に応じた周期誤差信号を出力する周期誤差信号出力手段20と、周期誤差信号に速度ゲインを乗算して得られる速度誤差信号を出力する速度誤差信号出力手段22と、基準信号EXCの周期EXC_countに対する補正基準周期Ref_countの比を補正量とし、その補正量を2乗して速度誤差信号出力手段22が備える所定の速度ゲインKfに乗算することにより、所定の速度ゲインKfを補正するゲイン補正手段28、30とを備えている。
(もっと読む)
モータ制御回路
【課題】簡素なデジタル回路を用いて構成され、広範な制御レンジでゲインを調整可能なモータ制御回路を提供する。
【解決手段】モータ駆動制御部90は、トルク指令データと第3の基準クロックとに応じて、モータ100を駆動する。トルク指令データは、第1の基準クロックとFG信号とに応じて速度誤差検出部40が出力する速度誤差データと第2の基準クロックとFG信号とに応じて位相誤差検出部60が出力する位相誤差データとが加算回路80で加算されて生成される。速度誤差データ及び位相誤差データは、それぞれ、速度検出用値設定部51及びカウント値設定部53、又は位相検出用値設定部71及びカウント値設定部73により設定される所定の範囲で出力される。第3の基準クロックの周波数を固定したままの広範な制御レンジで、第1及び第2の基準クロックの周波数を調整することによって、制御ゲイン及び制御範囲を設定できる。
(もっと読む)
モータの駆動制御システムおよび駆動制御方法
【課題】位置検出データの転送誤りを敏速に検出することにより、初回稼動時から不用意な暴走を確実に防止する駆動制御システムを提供する。
【解決手段】位置検出器に位置データの監視機能をもたせ、位置検出器が保持した最新位置データと、サーボ制御装置から出力させた最新位置データのエコーバック信号とを比較判定して、差異があるときには駆動禁止状態に遷移して、駆動禁止信号をサーボ制御装置に出力する。サーボ制御装置では、駆動禁止信号を入力すると駆動禁止状態に遷移して、フィードバック用位置データを最新位置データから推定位置データに切替え、指令信号を運転指令から所定の停止制御指令信号に切替え、速度、トルクがゼロに下がるまでは駆動を継続しながらモータを停止させる。
(もっと読む)
サーボシステム
【課題】モータの回転情報を検出するエンコーダと、エンコーダからの位置情報を用いて速度を求める制御装置からなるサーボシステムにおいて、低速回転時でも精度よく速度検出を行うことができるサーボシステムを提供する。
【解決手段】位置検出器で検出した位置検出データが変化した場合に位置検出データを記憶するデータ記憶器と、データ記憶器で記憶した位置検出データと、位置検出器で検出した最新の位置検出データを比較し、位置検出データが変化した場合に位置検出データの変化量と変化するまでの時間をカウンタで計数し、位置検出データの変化量をカウンタで計数したカウンタ計数値で除算し速度を検出する。
(もっと読む)
指針型表示器のモータ制御装置
【課題】機械式のアナログ式表示器に用いられ、指針を滑らかに移動させることによって見た目に違和感のない指針型表示器を実現するモータ制御装置を提供する。
【解決手段】モータ駆動制御部11は、所定時間毎に順次入力されるデータDaをデータ受信部10が複数受信すると、受信した複数のデータDaのうち少なくとも最初に受信したデータDaと最後に受信したデータDaから指針の回転量を算出するとともに、最初のデータDaを受信してから最後のデータDaを受信するまでの時間を指針の移動時間に設定する。またモータ駆動制御部11は、上記移動時間で上記回転量だけ指針を連続的に回転させる回転速度であって、上記移動時間の中間期間に比べて上記移動期間の開始期間及び終了期間が低速となる回転速度を算出し、指針が上記回転速度で回転するようにモータ駆動部12を制御する。
(もっと読む)
適応ノッチフィルタ、及びノッチフィルタのパラメタ調整方法
【課題】制御帯域を広げたときに生じる振動周波数成分を抑制するよう自動的にノッチフィルタを調整する。
【解決手段】適応ノッチフィルタは、共振が生じ得る制御対象への制御入力を生成するための信号に含まれる当該制御対象の固有振動数成分を抑制するためのノッチフィルタと、ノッチフィルタの中心周波数及びノッチ幅を含むパラメタを調整するためのパラメタ調整部と、を備える。パラメタ調整部は、制御対象の制御帯域を広げたときに生じた振動周波数成分とノッチフィルタの中心周波数との関係に応じて、調整されるべきノッチフィルタのパラメタを選択する。
(もっと読む)
電流測定方法及び電流測定装置
【課題】PWM電圧のデューティ比によらず、デューティサイクル毎に電流測定を精度良く行う電流測定方法及び電流測定装置を提供する。
【解決手段】デューティ比を0%に近づけていき、ADコンバータ14によるAD変換が終了しないうちに次の電流検出タイミングになる境界のデューティ比を下限値limit1、デューティ比を100%に近づけていきAD変換が終了しないうちに次の電流検出タイミングになる境界のデューティ比を上限値limit2として定義し、デューティ比が上下限値limit1,2の範囲内にあるときはパルスの立上りと立下りのタイミングでサンプリングし、下限値limit1以下又は上限値limit2以上のときは立上りのタイミングでのみサンプリングする。
(もっと読む)
撮像装置
【課題】省電力とノイズ低減とを両立する撮像装置を提供する。
【解決手段】撮像装置は、撮像素子と、撮像素子上に被写体像を形成する少なくとも1つのレンズと、制御信号に基づいて少なくとも1つのレンズを駆動するアクチュエータと、制御信号を出力するドライバであって、撮影時の被写体条件に応じて、アナログ制御信号を出力するかデジタル制御信号を出力するかを切り替えるドライバとを備えている。
(もっと読む)
モータ駆動装置
【課題】速度制御で動作するモータ駆動装置において、バックラッシュ補正を行う手段を提供することを目的とする。
【解決手段】コントローラ2は、モータ駆動装置1からのモータ位置フィードバックパルス113をパルスカウンタ202で受信し、モータ位置203を得る。モータ位置203を位置指令201と減算器204で比較し、位置偏差205を得る。位置偏差205は位置比例制御器206で位置比例ゲイン倍されて速度指令207となる。これをD/A変換器208でアナログ速度指令209に変換し、モータ駆動装置1に出力する。
(もっと読む)
停電時電源モジュール
【課題】同一構成の電動アクチュエータを通常の電動アクチュエータとしても緊急遮断機能を持つ電動アクチュエータとしても使用できるようにする。
【解決手段】電動アクチュエータ100に、中継コネクタ10を設け、停電時電源モジュール300が接続された場合には、モータ駆動回路4が生成する第1の駆動出力M1を停電時電源モジュール300へ中継するようにする。停電時電源モジュール300に、モータ電源切替回路19を設け、交流電源ACが停電していない時には電動アクチュエータ100から送られてくる第1の駆動出力M1(交流電源ACによって生成される駆動出力)を選択させ、交流電源ACが停電している時にはモータ駆動回路18が生成する第2の駆動出力M2(停電時電源ECによって生成される駆動出力)を選択させ、中継コネクタ10を通して電動アクチュエータ100のACモータ5へ送るようにする。
(もっと読む)
モータの回転速度制御回路
【課題】 積分回路を用いることなくモータの回転速度を安定させる。
【解決手段】 モータの回転速度に応じた周波数を有する速度パルス信号と前記モータの目標回転速度に応じた周波数を有する基準パルス信号との周期差を第1のクロックでカウントした第1のカウント値を出力する第1の周期差検出回路と、前記速度パルス信号と前記基準パルス信号との周期差を前記第1のカウント値に応じた周波数の第2のクロックでカウントした第2のカウント値を出力する第2の周期差検出回路と、前記第2のカウント値に応じたデューティ比のパルス幅変調信号を生成し、前記モータの駆動電流を出力する出力回路に供給するパルス幅変調回路と、を有する。
(もっと読む)
回転角度検出装置、回転電機装置および電動パワーステアリング装置
【課題】従来の回転角度検出の校正装置にあっては第2高調波の大きさが分かるものの、位相を考慮できていないという問題点があり、第2高調波の影響を完全に除去できないことがあった。また、ゼロ点パラメータの補正と第2高調波の補正を別々の手段で行なっているため、構造が複雑となってしまうという課題があった。
【解決手段】
互いに位相のずれた正弦波状の2相の出力信号を用いて回転角度を検出する、軸倍角がN(Nは正の整数)の回転角度検出装置であって、2相の出力信号をそれぞれEsin,Ecosとしたとき、Esin、Ecosの直流成分、およびEsin、EcosのN次成分を基本波成分としたときの第2高調波成分の振幅と位相に依存して発生する角度誤差N次成分(機械角360度周期の角度誤差を1次とした)を打ち消す手段として、回転角度に対して一定となる補正値を、2相の出力信号Esin、Ecosの少なくとも一方に加算する補正手段を備える。
(もっと読む)
1 - 20 / 114
[ Back to top ]