
Fターム[5H501LL07]の内容
電動機の制御一般 (20,975) | 検出変量、検出手段 (3,871) | 速度検出 (959) | デジタル値で検出するもの (383) | パルスエンコーダを用いるもの (343)
Fターム[5H501LL07]の下位に属するFターム
Fターム[5H501LL07]に分類される特許
201 - 220 / 288
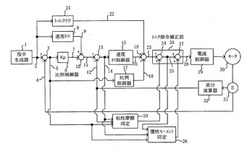
モータ制御装置
【課題】 慣性モーメントが変動しても安定で、制御性が高いモータ制御装置を提供する。
【解決手段】 位置偏差に比例ゲインを乗算し第1速度指令を生成する比例制御器(6)と、位置指令を微分し第2速度指令を生成する速度フィードフォワード制御器(8)と、速度偏差を比例・積分制御処理をし第1トルク指令を生成する比例積分器(15)と、位置偏差に比例ゲインを乗算し第2トルク指令を生成するトルクFF部(17)と、位置指令に比例ゲインを乗算し第3トルク指令を生成するトルクフィードフォワード制御器(21)と、モータ速度と速度偏差から粘性摩擦を同定する粘性摩擦同定器(20)と、第4トルク指令と粘性摩擦同定値から第5トルク指令を生成する加算器(24)と、第5トルク指令と速度偏差から慣性モーメント同定値を生成する慣性モーメント同定器(26)と、第5トルク指令と慣性モーメント同定値からトルク指令を生成する乗算器(27)とを備えた。
(もっと読む)
触覚デバイスを制御するための方法および装置
触覚デバイスを制御するための方法および装置。一つの態様では、触覚デバイスは、アクチュエータと;アクチュエータ速度を示すアクチュエータ信号を生成するアクチュエータセンサと;負荷と;負荷位置を示す負荷出力信号を生成する負荷出力センサと;負荷出力センサ、アクチュエータセンサおよびアクチュエータと電気的に通信するコントローラとを含む。コントローラは、ユーザに触覚応答を提供するために、アクチュエータ信号および負荷出力信号に応じてアクチュエータを制御する。一つの態様では、触覚デバイスのアクチュエータを制御するための方法は、アクチュエータの速度を示すアクチュエータ信号を生成する段階;負荷の位置を示す位置信号を生成する段階;およびユーザへの触覚応答を生成するために、アクチュエータ信号および負荷出力位置信号に応じてアクチュエータを制御する段階を含む。
 (もっと読む)
(もっと読む)
モータ駆動制御装置

【課題】モータの制動時に急激なバッテリ電圧の上昇を抑制することができるモータ駆動制御装置を提供する。
【解決手段】回転数低下検出部12によってモータの回転数と所定の低下幅とを比較し、モータの回転数が所定の低下幅よりも低下した場合、制御モード切替部16によって第2駆動制御部15による第2制御モードから第1駆動制御部14による第1制御モードに切り替え、駆動回路2を駆動して、モータ3を駆動する。第1制御モードは、駆動回路2により、電源端子からモータ3を介して接地端子にモータ電流を供給する状態と、電源端子とモータ3との間でモータ電流を環流する状態とを繰り返して切替制御することによって、大きな回生電力がモータ3からバッテリに供給されることを抑制して、バッテリ電圧の上昇を抑制する。
(もっと読む)
プリント装置
【課題】サーボモータの減速を無理なく行い、搬送量が目標量に達したタイミングで適正に搬送を停止するプリント装置を構成する。
【解決手段】サーボモータM31の回転によって減速開始位置に達した後には、理想減速軌跡より大きい減速傾向となる減速初期回転量を設定し、この減速初期回転量に対応する目標供給電力をサーボモータM31に供給して大きい減速を行った後に、理想減速軌跡の偏差を収束させる減速処理手段2Dを備えた。
(もっと読む)
モータ制御装置
【課題】 イナーシャ設定値Jnと実際の負荷イナーシャJがずれた場合や、摩擦等の外乱がある場合に、その影響を少なくし、応答の劣化を最小限に抑さえ、更に、簡単な調整で1倍から数百倍の負荷に対しても安定な制御系を実現することができるモータ制御装置を提供する。
【解決手段】 位置指令、速度指令、フィードフォワード指令のいずれか1つの指令に基づいて規範速度信号vmdlを算出する規範速度算出部7と、前記規範速度信号vmdlと速度フィードバック信号vfbの差をゲイン倍して速度ずれ補償信号vcompを出力するゲイン乗算部8と、を備える。
(もっと読む)
プリント装置
【課題】制御ユニットの負荷を増大させることなく、サーボモータを精度高く制御するプリント装置を合理的に構成する。
【解決手段】サーボモータM31のエンコーダE31からフィードバックする回転量に基づいてPID処理部3が目標供給電力値を設定し、電力算出部4の電力制御信号生成部4Aが目標供給電力値から電力コードと制御コードとを生成し、デコード処理部4Bが電力コードから駆動信号の基準ON時間を設定し、加算処理部4Cが制御コードからON時間を加算すべき駆動信号を特定し、これらに基づいてPWM電力供給部5がPWM制御のON時間を設定してサーボモータM31に出力する。
(もっと読む)
モータの速度制御回路
【課題】 速度ディスクリミネータ方式のブラシレスモータの速度制御回路では、目標とする回転速度が変更された場合、外付けされた抵抗の抵抗値を変更することが考えられるが、この場合、アナログスイッチも外付けする必要があった。
【解決手段】 セレクトスイッチSL1により、速度ディスクリ回路5から出力されるパルス電圧信号S4の電圧を切り替えるようにした。このため、外付けの部品を削減することができた。
(もっと読む)
フィードバック制御によるモータ制御回路の検査方法、モータ制御回路の検査装置、検査制御プログラム
【課題】 制御対象であるモータからフィードバックされるアナログ情報に基づくフィードバック制御を実行するモータ制御回路の良否判定を定量的かつ高精度に実行できるようにする。
【解決手段】 正常な記録制御部100の制御信号判定用プロファイル12のデータと、制御信号判定用プロファイル12を取得したときと同じフィートバック信号(入力信号プロファイル11)によるフィードバック制御を実行したときの検査対象の記録制御部100の制御信号プロファイル13のデータとを対比し、両データが一致しているか否かによって、フィードバック制御に対するPFモータ58及びCRモータ63の駆動電圧波形が正常か否かを判定して、その検査対象の記録制御部100が正常か否かを判定する。
(もっと読む)
回転装置、回転制御方法及び画像形成装置
【課題】 モータの回転が伝達機構を介し伝えられる回転体を一定速度で回転させる装置において、モータ軸の偏心成分の外、回転体の整数倍の周期を持つノイズ成分により起きる速度変動を高精度な検出手段を用いることなく、検出可能とし、速度変動を抑制する。
【解決手段】 一定速度で回転すべき感光体ドラム7にモータ40の回転が減速ギア45を介して伝達される装置構成において、減速ギア比を2.5対1(非整数)とし、ドラム回転の整数倍の周期を持つ予測ノイズ成分に対応する複数種の正弦波状回転むらを与えてドラムを回転させ、この回転制御時にドラム回転ごとに例えば2パルスを出力する検知手段(回転板60とセンサ61)による回転同期信号を2回転にわたって検出する。得られるパルス間隔時間から、モータ軸偏心、ノイズの各成分の振幅と位相を算出する。算出した各変動成分を打消すようにモータ駆動を制御することにより一定速度のドラム回転を得る。
(もっと読む)
モータ制御装置
【課題】 動作が制限される機械系のイナーシャを同定するモータ制御装置を提供する。
【解決手段】 動作に制限条件がある機械を駆動するモータのモータ制御装置であって、速度指令とモ−タ速度によりトルク指令を生成する速度制御部(21)と、前記トルク指令からモータを駆動するモータ駆動部(22)とを備えるモータ制御装置において、イナーシャを同定するイナーシャ同定部(24)と、前記制限条件に基づいて同定指令を生成する同定指令部(25)とを備えた。
(もっと読む)
電動機制御装置
【課題】外乱の入力があっても、電動機の回転異常を正確に検知可能な電動機制御装置を提供する。
【解決手段】回転速度検出部でモータの回転速度を検出して、回転速度記憶部に記憶する。1回変化量算出部で回転速度検出部から出力される現在の回転速度と、回転速度記憶部に記憶された過去の回転速度とから回転速度の変化量を1回変化量として算出して、1回変化量記憶部に記憶する。2回変化量算出部で1回変化量算出部から出力される現在の1回変化量と、1回変化量記憶部に記憶された過去の1回変化量とから回転速度の変化量の変化量を2回変化量として算出する。そして、現在の1回変化量が増加傾向を示しかつ現在の2回変化量が減少傾向を示したときに、閾値変更部で閾値を変更し、変化量・閾値比較部で変更後の閾値と1回変化量とを比較して、該比較結果に基づいて回転異常判定部でモータの回転異常の有無を判定する。
(もっと読む)
回転駆動装置及びそれを用いたカラー画像形成装置
【課題】回転体の回転速度を複数のセンサを介して検出して駆動モータの回転速度を制御する回転駆動装置において、複数のセンサの何れかに故障を来たしても、回転軸の回転動作を精度良く制御することを目的とする。
【解決手段】 回転駆動装置1は、検出部100に、ロータリエンコーダ3を介して複数のセンサS1、S2から出力された夫々のパルス列に基づいて夫々のセンサの故障を検出する故障検出部9と、正常なセンサから出力されるパルス列のみを用いて回転軸2の平均速度を演算する平均化器12とを備え、制御回路13を介して、平均速度が指令速度に近づくように駆動モータ15の駆動を制御する。
(もっと読む)
サーボ制御装置
【課題】周期的に繰り返される目標値や外乱に対する制御誤差を、効果的に低減するサーボ制御装置を提供する。
【解決手段】安定補償回路106を、カットオフ周波数=繰り返し周波数×4の1次ローパスフィルタ201、カットオフ周波数=繰り返し周波数/4の1次ハイパスフィルタ202、ゲイン0.8の減衰器203を直列接続して構成し、安定補償回路106の繰り返し周波数における位相を0とすることにより、繰り返し補償回路102のピークゲイン周波数が、繰り返し周波数に一致させ、周期的に繰り返される目標値や外乱に対する制御誤差を、効果的に低減することを実現する。
(もっと読む)
回転体駆動制御装置および画像形成装置
【課題】モータの1回転周期のような短周期な回転周期変動を低コストで高精度に検出し、補正できる回転駆動制御装置およびそれを用いた画像形成装置を提供する。
【解決手段】モータ6と、モータ6の回転力を伝達する伝達機構10〜12と、伝達機構に連結された感光体ドラム1と、ドラム1の回転軸12を中心に環状に配設された複数のスリット13と、回転軸12を中心とする円周上に形成されて複数のスリット13のうちの任意の2つのスリット13を両端に有する第1および第2の区間と、スリット13を検出する2つのセンサ14とを備え、2つのセンサ14の間を感光体ドラム1に生じる回転周期変動のうちの検出所望周期の2πの整数倍とπ/2分ずれた配置関係に配置しておき、センサ14が検出した2つの区間のスリット13の通過時間から回転周期変動を検出してモータ6の回転を制御する。
(もっと読む)
サーボモータ制御装置
【課題】制御精度を保持し、インバータのスイッチング素子の寿命を延ばし、トルクショックを抑制するサーボモータ制御装置を提供する。
【解決手段】インバータのスイッチング素子の温度が基準値より大きく、モータの回転速度が基準値より遅い状態が、所定時間持続したとき(a1〜a8)、所定時定数でサーボ制御ゲインを低いゲインにする(a9,a10)。その後、長いPWM周期に切り替える(a12)。モータの回転速度が遅いので、応答性を低下させても制御精度への影響は小さい。又、サーボ制御ゲインを徐々に低下させた後にPWM周期を長くするように切り替えたから、トルクショックを軽くすることができる。又、スイッチング素子の温度が基準値より小さく、モータの回転速度が基準値より速いときには、PWM周期は短いものに、サーボ制御ゲインは高いものに切り替え(a14,a15)、制御精度を確保する。
(もっと読む)
モータ制御方法およびモータ制御装置
【課題】モータの暴走を検出する機能を備え、モータの加減速時でもモータの異常回転を即座に検出しモータの保護性能を高める。
【解決手段】速度指令に応じて駆動するモータの回転速度を制御するモータ制御装置1において、速度指令VCMDからモータ回転の検出速度TSAを減じて得られる速度偏差Verが閾値以上であり、所定の周期で検出される検出速度の今回値から前回値を減じて得られる加速度ΔTSAと前記速度偏差を比例積分して得られるトルク指令Tcとの積の符号が負であり、かつ速度偏差Verの積算値VerSUMが所定値ALMlevelを超えたとき、モータが異常回転状態であると判定する異常回転検出手段21を備える。
(もっと読む)
モータ制御方法及びモータ制御装置
【課題】 モータにより駆動される駆動対象を一定の範囲内でフィードバック制御するにあたり、駆動対象の滑らかな速度変化を維持しつつ、フィードバック制御器の設計負担を軽減する。
【解決手段】 減速制御が開始される減速制御開始タイミング(t=t2)からキャリッジが停止するまでの減速制御期間では、速度フィードバック制御における目標速度として、減速制御開始タイミングからの経過時間の減速関数f(t)から得られる減速指令が用いられる。減速関数f(t)は、減速制御開始タイミングにて目標定速速度Vtから連続的に減少していくと共に減速指令が0になるまで単調減少し、且つ、その導関数も単調関数となるような関数である。また、減速指令がVtから0になるまでの時間である減速指令時間(t=t2〜t3)は、加速制御期間長である加速時間τと同じである。
(もっと読む)
サーボ制御装置
【課題】振動を抑え安定性のある制御ゲインの設定を可能とするサーボ制御装置を提供する。
【解決手段】サーボ制御装置は、速度制御部14の速度制御ゲインを電流制御ゲインに連動して変更する速度制御ゲイン変更部12と、速度制御ゲインに連動して電流制御部16の電流制御ゲインを変更する電流制御ゲイン変更部13と、電流制御ゲインに基づいて速度制御ゲインの上限を制限する速度制御ゲイン制限部20と、を備える。
(もっと読む)
電動機制御装置
【課題】電動機の回転速度が一定の変化傾向にあっても、電動機の回転異常を正確に検知可能な電動機制御装置を提供する。
【解決手段】回転速度検出部からの出力によりモータの現在の回転速度を取得して記憶し、取得した現在の回転速度と過去に記憶した過去の回転速度とから回転速度の変化量を1回変化量として算出して記憶し、算出した現在の1回変化量と過去に記憶した過去の1回変化量とから回転速度の変化量の変化量を2回変化量として算出して記憶する。現在から所定回数前の所定区間に算出して記憶した過去の1回変化量と2回変化量のうち、該1回変化量が予め設定された第1の所定値に達し、かつ該2回変化量が予め設定された第2の所定値に達していない場合に、1回変化量が閾値に達し難くなるように閾値を変更し、該変更後の閾値と現在の1回変化量とを比較した結果に基づいて電動機の回転異常の有無を判定し、該判定結果に応じて電動機を制御する。
(もっと読む)
モータ制御回路及びモータ制御方法
【課題】モータの回転速度をカウントする周期をモータの回転周期に応じて可変させ、カウンタのビット数を増やすことなく、制御精度を向上させることができるモータ速度制御回路及びモータ速度制御方法を提供すること。
【解決手段】モータ制御回路1は、モータの回転速度に応じた検出信号Dを出力する検出器16と、検出信号が示す回転周期に応じてクロックをカウントするカウンタ17と、カウント結果に応じてDCモータ15を制御する制御部と、設定された分周値に基づき基本クロックCLK0を分周してカウント用クロックCLKnを生成する分周器18とを有する。分周器18は、回転周期に応じた周波数のカウント用クロックCLKnを生成し、カウンタ17は、このカウント用クロックCLKnをカウントする。
(もっと読む)
201 - 220 / 288
[ Back to top ]