
Fターム[5H501LL07]の内容
電動機の制御一般 (20,975) | 検出変量、検出手段 (3,871) | 速度検出 (959) | デジタル値で検出するもの (383) | パルスエンコーダを用いるもの (343)
Fターム[5H501LL07]の下位に属するFターム
Fターム[5H501LL07]に分類される特許
161 - 180 / 288
電子制御システム
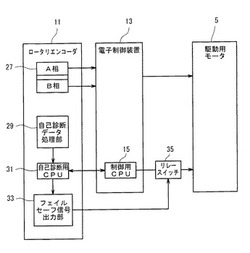
【課題】ロータリエンコーダを組み込んだ電子制御システムでのさらなる安全性向上を図ること。
【解決手段】ロータリエンコーダ11と、このロータリエンコーダ11の検出出力からモータ5を駆動制御する制御用CPU15を内蔵した電子制御装置13と、を含み、ロータリエンコーダ11に、当該ロータリエンコーダ自体の自己診断を実施する自己診断用CPU31を内蔵するとともに、この自己診断用CPU31に、上記制御用CPU15を監視する監視用CPUの機能を持たせた構成。
(もっと読む)
ロータリエンコーダ

【課題】電子制御装置の制御用CPUの通信ポートに空きが無くても、ロータリエンコーダの複数の自己診断情報を簡素で安価な構成で伝送可能とすること。
【解決手段】ロータリエンコーダ11の自己診断用CPU25からの自己診断結果をデューティ可変のフェイルセーフ信号として電子制御装置13の制御用CPU39の汎用ポートに出力することで該汎用ポートとは単一の信号線36にて接続可能としたフェイルセーフ信号出力部35を内蔵した構成。
(もっと読む)
モータ制御装置
【課題】エンコーダが出力する信号の波形割れの影響を抑えてモータのPID制御を安定的に行えるようにすること。
【解決手段】被駆動体と、駆動力を与えるモータと、被駆動体の実速度を示す信号を出力する実速度測定手段と、目標速度を特定する目標速度特定手段と、第1のフィードバック制御値を示す信号を出力する第1の算出手段と、第2のフィードバック制御値を算出する手段であって、算出した制御値が予め設定された下限の制御値を上回るときにその算出した制御値を示す信号を出力し、下限の制御値を下回るときにその下限の制御値を示す信号を出力する第2の算出手段と、フィードバック制御値の和を基にモータの回転量を調整することにより、被駆動体の駆動の実速度を目標速度に収束させる制御手段とを備える。
(もっと読む)
機械的共振周波数補償装置
【課題】共振周波数を算出する際の処理速度を向上させる。
【解決手段】サーボモータシステム1は、モータ2に接続されるサーボコントローラ3に機械的共振周波数補償装置21が設けられている。機械的共振周波数補償装置21は、エンコーダ4から速度フィードバック値が入力されるバンドパスフィルタ22と、共振周波数推定器23と、ノッチフィルタ係数発生器24とを備え、共振周波数推定器23は共分散行列の逆行列の値を用いた最小二乗理論によって算出される収斂値としてノッチフィルタの係数を求めるように構成されている。
(もっと読む)
フィードバック制御系の振動検出装置およびその検出方法、ならびに振動検出装置を備えたモータ制御装置
【課題】 モータまたは負荷の慣性モーメントの値がずれても振動状態を精度良く検出し、素早く異常を察知して騒音や機械系の損傷等を防止することができるフィードバック制御系の振動検出装置およびその検出方法、ならびに振動検出装置を備えたモータ制御装置を提供する。
【解決手段】 制御装置(12)のモデル部(13)と、前記制御装置(12)の出力と前記モデル部の出力との差信号をフィルタリングした上下限ピーク値に基づいて、振動の発生を判断する振動状態判断部(11)と、を備えた。
(もっと読む)
負荷イナーシャ同定方法及びサーボモータ制御装置
【課題】 実際の運転前の制御装置への電源オン時に、短時間に、モータを駆動することなく微少動作で負荷イナーシャを同定できる方法を提供する。
【解決手段】 位置及び/または速度制御部1に所定周波数の正弦波の位置指令を与える位置指令発生部4と、トルク指令の応答周波数を算出するトルク指令応答算出部6と、負荷イナーシャの同定処理を行う負荷イナーシャ同定部5とを備えた装置の負荷イナーシャ同定方法において、位置指令周波数とトルク指令応答周波数とを比較し、前記位置指令周波数が前記トルク指令応答周波数よりも高い場合は、初期値として与えた仮設定イナーシャを補正して負荷イナーシャを算出し、前記位置指令周波数が前記トルク指令応答周波数よりも低い場合は、前記仮設定イナーシャからモータイナーシャを差し引いた値或いはそれ以下を負荷イナーシャ値とする。
(もっと読む)
単一スイッチ方式のスイッチドリラクタンス機を制御する方法、制御装置、および電力変換装置
多相モーターを制御する方法は、第1の相のドエル時間が始まったとき、モーターの第1の相の励磁を、ゼロでない期間について抑制するステップを含んでいる。ゼロでない期間が終了した時点で、第1の相の励磁を有効化する。ドエル時間が終了する前または終了時に発生する無効化時において、ドエル時間の残りの間、第1の相の励磁を無効化する。  (もっと読む)
(もっと読む)
モータ制御装置
【課題】コストの増大を招くことなく、容量が異なるサーボモータを高精度に制御できるサーボモータ制御装置の提供。
【解決手段】サーボモータに供給される電力の電圧を検出するU相,W相ホールCT920,930と、このU相,W相ホールCT920,930で検出された電圧を増幅するU相,W相電圧増幅器120,130と、このU相,W相電圧増幅器120,130で増幅された電圧に基づきサーボモータに供給される電力を制御するA/Dコンバータ960および演算装置160と、を備え、サーボモータの駆動状態を制御するサーボモータ制御装置において、一般的に入力抵抗素子941,951、オペアンプ942,952、帰還抵抗素子943,953で構成されるU相,W相電圧増幅器120,130に、抵抗値を変更可能なU相,W相可変抵抗部121,131を帰還抵抗素子943,953に対して並列に設けた。
(もっと読む)
位置切換制御装置
【課題】モータを駆動源とする位置切換制御装置において、フェールセーフ制御時に位置切換機構の操作位置(レンジ)を誤判定する可能性を低減する。
【解決手段】通常は、モータ12をF/B制御(フィードバック制御)し、故障発生時にフェールセーフ制御(オープンループ制御)を実行する。フェールセーフ制御時には、レンジの切換判定範囲をF/B制御時よりも広げる。フェールセーフ制御中は、モータ12の駆動信号のカウント値からロータ回転角を推測するだけであるため、その推測値に対して実際のロータ回転角がずれている可能性がある。従って、フェールセーフ制御中は、切換判定範囲が狭いと、却ってレンジを誤判定しやすくなる。この対策として、フェールセーフ制御時に、レンジの切換判定範囲をF/B制御時よりも広げるようにしたものであり、これにより、フェールセーフ制御中でも、レンジを従来よりも精度良く判定することが可能となる。
(もっと読む)
モータ制御装置、記録装置、モータ制御方法
【課題】 加減速領域において良好な追従性が得られるPWM制御によるモータ制御を実現する。
【解決手段】 比例要素461は、目標回転速度と回転速度との速度偏差に比例定数Gp(比例ゲイン)を乗算した値を比例項出力Tpとして出力する。微分要素463は、n回前の制御時における速度偏差と今回制御時における速度偏差との差分に微分定数Gd(微分ゲイン)を乗算した値を微分項出力Tdとして出力する。積分要素462は、目標回転速度と回転速度との速度偏差に積分定数Gi(積分ゲイン)を乗算した値に、前回制御時と今回制御時との目標回転速度の速度偏差に補正定数Gv(速度補正ゲイン)を乗算した値を加算し、加算した値を累積し、その累積値に積分初期値を加えた値を積分項出力Tiとして出力する。
(もっと読む)
車両用モータ制御装置
【課題】モータ駆動回路自体の発熱やモータ駆動回路のばらつきがあっても、PWM制御における目標デューティで車載モータを駆動できるようにする。
【解決手段】モータ駆動回路401から出力されるモータ駆動信号のデューティを計測し、PWM制御における目標デューティと前記計測したデューティとの偏差を求める。前記偏差が閾値を超えるときには、デューティの計測値はノイズを検出した結果であると判断し、補正値の更新を禁止する。一方、前記偏差が閾値以下であれば、前記偏差に基づいて目標デューティを補正するための補正値を設定し、該補正された目標デューティでPWM制御を行わせることで、前記モータ駆動信号のデューティが目標に一致するようにする。
(もっと読む)
モータ制御システム
【課題】1台の数値制御装置でDSPのない第1形式のアンプとDSPを有する第2形式のアンプを制御するモータ制御システムで、数値制御装置に設けるインターフェース回路(シリアルバス制御回路)の個数を削減してコストを低減する。
【解決手段】PWM指令を受ける第1形式のアンプ51と、位置指令を受ける第2形式のアンプ61と、数値制御装置41と、シリアルバス48A,49Aと、を備え、数値制御装置41は、モータの位置指令を算出する第1のプロセッサ42と、位置指令から第1形式のアンプのPWM指令を算出するDSP43と、第1形式のアンプのPWM指令及び第2形式のアンプの位置指令をシリアルバス49Aに出力するシリアルバス制御回路47と、を備え、第1形式のアンプ51は、受信したPWM指令から直接モータの駆動電流信号を生成し、第2形式のアンプ61は、受信した位置指令からPWM指令を算出する第3のプロセッサ62を備える。
(もっと読む)
電子機器、及び電子機器における電動機の制御方法
【課題】電源投入後最初の電動機の蓄熱量を適切に推定できる電子機器、及び電子機器における電動機の制御方法を提供する。
【解決手段】電源オン時に、電源オフ時に記憶したモータ蓄熱量M1とヘッド温度H1とを読み出す。電源オン時のヘッドサーミスタの検出値からヘッド温度H2を取得し、電源オフ時から次回の電源オンまでのヘッド放熱量ΔTh(=H1−H2)を求める。予め記憶された関係式(一次近似式;ΔTm=a×ΔTh+b)に基づきヘッド放熱量ΔThから対応するモータ放熱量ΔTmを求める。そして、電源オフ時のモータ蓄熱量M1からモータ放熱量ΔTmを差し引く演算を行って、電源オン時のモータ蓄熱量M2(=M1−ΔTm)を推定する。
(もっと読む)
モータ制御装置
【課題】オーバシュート量を低減させ、起動時間を短縮させることが出来るモータ制御装置を提供すること。
【解決手段】モータの起動前までには積分器操作装置により積分器の積分結果はゼロにしており、且つ積分演算を無効にしており、モータ起動後、モータの回転数の目標値と実際値との差が一定の範囲内に収まっている状態が一定の時間だけ継続して以後に、積分器操作装置により前記積分器の積分演算を有効にする構成となっている。
(もっと読む)
モータ制御装置と速度信号生成方法
【課題】低分解能の位置検出器を使用しても速度検出精度を向上させたモータ制御装置と速度信号生成方法を提供する。
【解決手段】位置指令と位置信号から速度指令を生成する位置制御部(1)と、速度指令と速度信号からトルク指令を生成する速度制御部(2)と、トルク指令に基づいてモータを駆動するモータ駆動部(3)と、モータに結合された位置検出器の生成するモータ位置検出信号から位置信号を生成する位置信号生成部(4)と、位置信号から速度信号を生成する速度信号生成部(5)と、を備えたモータ制御装置において、前記速度信号生成部は、前記位置信号を制御時間ごとに差分をとって速度信号を生成する位置差分部(51)と、前記速度信号をフィルタするフィルタ部(52)とを備え、フィルタ部(52)は、位置検出器の分解能に応じて時定数を決定する。
(もっと読む)
リニアモータ
【課題】 機械的な特性に基づく位置決め誤差を補正することができるリニアモータを実現する。
【解決手段】 与えられた位置指令値に基づいて移動軸方向に直線的に移動制御されるスライダを有するリニアモータにおいて、
前記移動軸方向の所定距離毎のロール角,ピッチ角,ヨー角を測定して収集するデータ収集手段と、
このデータ収集手段の収集データに基づいてロール角,ピッチ角,ヨー角の変化を関数で近似する関数化手段と、
この関数化手段の関数に基づいて前記移動軸の垂直真直度と水平真直度を演算する積分演算手段と、
前記位置指令値、前記関数化手段の関数データ、前記積分演算手段の垂直真直度と水平真直度データに基づいて、前記スライダの絶対座標位置を演算する絶対座標位置演算手段と、
を備える。
(もっと読む)
画像形成装置
【課題】経時、環境変動にも対応し、待ち時間も発生させずに、上記駆動伝達系の加工、組立て誤差に起因する位置ズレやバンディングを低減する画像形成装置を提供することにある。
【解決手段】本発明の画像形成装置は、像担持体(8)の回転速度、若しくは、回転位置を検出するエンコーダー(57)はセンサーを2個有する2相出力のエンコーダー(57)であり、いずれか1方の出力を参照信号として直接駆動モーター(50)にフィードバックし、他方の出力の回転速度、若しくは回転位置を演算する演算手段と、像担持体(8)の1回転内の基準位置を検出する基準位置検出手段と、上記速度演算結果に基づいて駆動モーター(50)の入力クロックを微調整する手段とを有する。
(もっと読む)
プリンタ
【課題】プリンタにおいて、キャリアの振動による印刷品位の劣化を抑制する。
【解決手段】プリンタは、キャリアモータを回転制御することにより、印刷ヘッドを保持するキャリアを移動制御し、このとき、キャリアの移動速度が所定の目標速度となるように、キャリアモータの回転速度をフィードバック制御する。プリンタは、印刷コマンドを受信すると(#21)、まず、キャリアを印刷コマンドによる印刷速度と同じ速度で移動させて、印刷ヘッドの目詰まりを防止するためのメンテナンス動作を実行し(#23)、このメンテナンス動作でキャリアに振動が発生しているか否かを判断する(#24)。そして、プリンタ1は、キャリアに振動が発生していれば(#24でYES)、キャリアモータの駆動パラメータを変更し(#25)、その変更した駆動パラメータを用いてキャリアモータの回転速度をフィードバック制御して、印刷動作を実行する(#26)。
(もっと読む)
モータ駆動装置
【課題】複写機・LBPに使用される複数の速度で動作するモータ駆動装置において、各々の速度に応じた速度サーボゲインおよびFGアンプゲインの切換えを実施し、最適な通電制御を行うモータ駆動装置を提供することを目的とする。
【解決手段】FGアンプ手段104のゲインおよび速度アンプ手段112のゲインを、ゲイン切換信号116により、高速または低速の個々の速度に最適な条件に設定したFGアンプゲイン設定手段105及び速度アンプゲイン設定手段113を連動して切換えることにより、モータの回転精度が良好にできる。
(もっと読む)
モータ位置制御方法
【課題】負荷の急激な変動に対してもトリップすることがなく、スムーズな位置決めが可能なモータ位置制御装置を安価に提供する。
【解決手段】モータから検出した位置データ12と位置指令11を比較して位置偏差から速度指令を生成する位置制御ブロック10と、速度指令とモータから検出した速度データを比較して速度偏差からトルク指令を生成する速度制御ブロック20と、モータに適したトルク制御を行うトルク制御ブロック30とを有するモータ位置制御装置において、速度制御ブロック20は、位置制御ブロック10で生成した速度指令を入力する速度リミット機能21を有し、速度リミット機能21は、速度指令が速度リミット設定値を超えたときに、速度リミット設定値を速度指令として出力し、速度リミット設定値以下のときに、入力された速度指令値を出力して、位置偏差を急に減らさないように速度指令を制限する。
(もっと読む)
161 - 180 / 288
[ Back to top ]