
Fターム[5H501LL07]の内容
電動機の制御一般 (20,975) | 検出変量、検出手段 (3,871) | 速度検出 (959) | デジタル値で検出するもの (383) | パルスエンコーダを用いるもの (343)
Fターム[5H501LL07]の下位に属するFターム
Fターム[5H501LL07]に分類される特許
101 - 120 / 288
モーター電流検出装置およびモーター電流検出方法
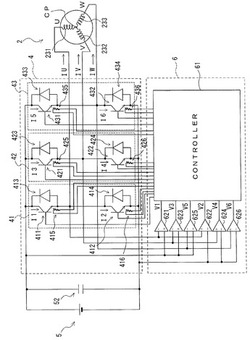
【課題】小型で低コストのモーター電流検出装置およびモーター電流検出方法の提供。
【解決手段】車両制御装置6は、インバーター装置4中の、アッパー素子に当たるトラジスター411、421、431のコレクタ、エミッタ間電圧を検出した後、電圧電流特性に基づき、トラジスター411、421、431のコレクタ電流を検出する。また、ロアー素子に当たるトランジスター412、422、432のコレクタ、エミッタ間電圧を検出した後、電圧電流特性に基づき、トラジスター412、422、432のコレクタ電流を検出する。車両制御装置6は、アッパー素子に当たるトラジスター411、421、431のコレクタ電流から、同じスイッチ列41〜43に属するロアー素子に当たるトラジスター412、422、432のコレクタ電流を減算することにより、各相コイル231〜233に流れる電流を算出する。
(もっと読む)
モータ制御装置及び画像形成装置

【課題】 モータの角速度を目標角速度まで線形的に立ち上げることができるようにする。
【解決手段】 DCモータの起動時に、DCモータへ指示する制御値を、目標角速度より小さい角速度に対応する第1の制御値NSTAから目標角速度より大きい角速度に対応する第2の制御値NENDまで一定比率で増加させ、DCモータが目標角速度になった(t2)ことに応じて、DCモータを目標角速度に維持するための制御値に切り替える。
(もっと読む)
車両
【課題】回路構成が複雑でなく、位相差信号に対する応答性が良好で、かつ、熱により信号変動が小さいモーター制御回路を提供する。
【解決手段】モーターの回転制御回路において、前記モーターのPWM制御回路と、前記モーターの回転速度センサと、基準信号発生回路10と、位相比較回路と、前記モーターの検出回転速度信号を分周する分周器とを備え、この分周器からの信号と前記基準信号に基づく信号との位相差を位相比較器で求め、この位相差信号を前記PWM制御回路に供給するように構成した。
(もっと読む)
信号処理装置、画像形成装置、および信号処理方法
【課題】ナイキスト周波数よりも低いサンプリング周期を適用し、FFT変換して取得したピーク値の周波数を適切に復元できるようにした。
【解決手段】異なる2つのサンプリング周期で周波数解析に必要なデータをサンプリングし(処理201〜判断206)、ピーク値が不一致となる周波数があるかどうかを調べ(判断208)、ある場合には、(fa−fb)=(Pa−Pb)の関係を満たすピーク値を探し(処理209)、そのようなピーク値を見つけると(判断210の結果がYES)、Fr=(fa−Pa)=(fb−Pb)の関係式を適用して、ピーク値の周波数Frを補完(復元)する(処理211)。
(もっと読む)
モータ制御装置
【課題】エンコーダの電源電圧をフィードバックする専用線や、エンコーダに供給されている電圧を測定するための電源電圧レベル検出回路を追加することなく所望の電圧をエンコーダに供給することができるようにする。
【解決手段】シリアル伝送路のデータを監視しながらエンコーダに供給する電源電圧を段階的に下げていき、エンコーダからの応答がなくなった段階の先回の電源電圧がエンコーダの所望する端子電圧であると判断し、エンコーダ電源供給回路の出力電圧を調整する電圧調整処理回路を備える。
(もっと読む)
繊維機械
【課題】回転速度にかかわらず効率良く正確に電気モータを制御できる繊維機械を提供する。
【解決手段】自動ワインダは、モータ51と、位置センサ56と、電流センサ70と、パルス検出部55と、モータ制御部52と、を備える。位置センサ56は、モータ51のロータ磁極位置を検出する。電流センサ70は、モータ51の電流を検出する。パルス検出部55は、モータ51の回転に応じたパルスを検出する。モータ制御部52は、モータ51の回転を制御する。また、モータ制御部52は、第1制御部71と、第2制御部72と、を備える。第1制御部71は、位置センサ56の検出結果及びパルス検出部55の検出結果に基づいてモータ51の回転を制御する。第2制御部72は、電流センサ70の検出結果に基づいてモータ51の回転を制御する。
(もっと読む)
モータ制御装置とその位置制御方法
【課題】
位置制御周期が変動しても原点信号と位置関係に悪影響を及ぼすことのないモータ制御装置と位置制御方法を提供する。
【解決手段】
位置制御部は、位置制御周期をモータ位置生成時刻増分値で除し、予め設定された第1位置制御ゲインを乗じて第2位置制御ゲインを生成する第2位置制御ゲイン生成部(21)と、位置指令増分値と第1位置制御ゲインを乗じた値からモータ速度増分値と第2位置制御ゲインを乗じた値を減算し、さらに前回の速度指令を加算して新たな速度指令とする速度指令生成部(22)と、を備えた。
(もっと読む)
電源装置および電源装置の制御方法
【課題】モータが力行状態・回生状態を頻繁に繰り返す場合であっても、電力変換装置が備えるコンデンサの充放電電流による損失の増大を抑制する。
【解決手段】電源制御部43は、コンデンサ温度Tcが第1の温度判定値Tcth1よりも大きい場合には、制御要求フラグFreqを「1」にセットする。これにより、回生状態から力行状態に移行した場合、電源制御部43は、第1および第2の電源を直列接続に設定する。
(もっと読む)
分注装置、自動分析装置及び分注装置のメンテナンス方法
【課題】駆動モータ停止時における振動の振幅の増大を抑えることが可能な分注装置、自動分析装置及び分注装置のメンテナンス方法を提供すること。
【解決手段】回動モータ34の回転がタイミングベルト36によって伝達される支柱21を中心として回動すると共に、支柱方向に昇降する分注アーム20aを備え、試薬又は検体を含む液体試料を分注する検体分注装置20、自動分析装置及び分注装置のメンテナンス方法。検体分注装置20は、駆動モータ34停止時の支柱21又は駆動モータの回転軸の回転方向の振動を検知するロータリエンコーダ38と、駆動モータの駆動速度を制御する制御部15とを備え、制御部は、ロータリエンコーダが検知した振動の振幅が所定の閾値を超えた場合に駆動モータの駆動速度を減速制御する。
(もっと読む)
モータ制御装置
【課題】モータとエンコーダの間の偏芯量を直接に計測することなく、偏芯に起因する速度リップルを防止することが出来るモータ制御装置を提供する。
【解決手段】本発明に係るモータ制御装置は、モータ3に取り付けられたエンコーダ4の出力信号に基づいて、モータ回転速度を検知し、検知されたモータ回転速度と速度指令との偏差に応じたトルク指令を生成するものであって、補償量決定モードにて、モータ3を一定速度で回転させるための速度指令を生成し、それによってトルク指令に現われる波形を検知し、その検知される波形から、モータ3とエンコーダ4の軸芯のずれに起因してエンコーダ4の出力信号に含まれる外乱成分を導出し、導出された外乱成分を相殺するための補償量を決定する。
(もっと読む)
モータ速度制御装置
【課題】モータから回転に同期したパルス信号を1種類しか得られないモータ速度制御装置は、モータの逆転暴走を生じ得る。
【解決手段】フィードフォワード制御部は、モータの目標回転速度ωTの大きさと向きとを設定する目標設定値を入力され、ωTに基づいて目標指令信号を生成する。フィードバック制御部は、(ω−ωT)に応じた誤差信号Veを生成し、Veに基づいて補償指令信号を生成する。モータ速度制御装置は、目標指令信号と補償指令信号とを合成した合成信号に基づいてモータの回転速度をωTに制御する。合成信号の回転速度に対する調節向きがωTの向きとは逆で、かつ合成信号の強度が所定の閾値を超えた状態が所定期間継続した場合に、逆転暴走状態であると判定し、正常状態への復旧処理を行う。
(もっと読む)
モータ速度制御装置
【課題】モータ速度制御装置において、回路規模や処理負荷の増加を軽減しつつ、目標回転速度に依存しないゲインでのフィードバック制御を実現する。
【解決手段】モータの回転速度ωに反比例してパルス周期τPが変化するパルス信号に基づきωを制御する。計数クロック生成回路40は、目標回転速度ωTに比例して計数クロックのクロック周波数FCを変化させる。パルス周期測定部38は、現在のωでのτPにて計数クロックをカウントして測定計数値Cを求める。フィードバックフィルタ44は、Cと、ωTに対応した目標計数値CNとの差をエラー信号Veとして入力され、エラー信号Veを補償するための指令信号を生成する。フィードバックフィルタ44は、ωTに比例する倍率で指令信号をスケーリングする。
(もっと読む)
速度演算装置、速度推定装置、画像形成装置、及びプログラム
【課題】回転体の回転に関する速度の変動の追従性を向上させると共に精度の高い回転体の回転に関する速度を演算する。
【解決手段】ロータリエンコーダ52によって発生された複数のパルス信号の各々のパルスの立ち上がり及び立ち下がりを検出し(210)、ステップ210で立ち上がりまたは立ち下がりが検出される毎に、ステップ210で検出された今回の立ち上がりまたは立ち下がり以前の予め定められた個数分(T0、T1、T2、T3の4個分)の検出された立ち上がりまたは立ち下がりの検出間隔を示す時間(T0、T1、T2、T3)の総和の時間E1を演算し(214)、総和の時間E1と、ロータリエンコーダ52によって発生されたパルス信号の1パルスに対応する画像形成ドラム44の回転角度Θ0とに基づいて、画像形成ドラム44の回転に関する速度を演算する(218)。
(もっと読む)
機械の故障診断部を備えた電動機制御装置
【課題】 発生した振動レベルまたは振動周波数のピーク値の時間変動、あるいはモータ速度、トルク(推力)等のモータ状態量のピーク値の時間変動等の検出値により、機械の故障の可能性ありと判断するとともに、上記検出値に基づいて故障の原因を推定し、優先的に故障診断をおこなうことで故障の原因特定にかかる時間を短縮することができる機械の故障診断部を備えた電動機制御装置を提供する。
【解決手段】 位置指令、電動機位置、速度指令、電動機速度、トルクまたは推力指令のうち少なくとも1つの時系列波形データを保存し、前記時系列波形データに基づいて複数の振動周波数成分および振動振幅ピーク値を検出し、前記複数の振動周波数成分および前記振動振幅ピーク値に基づいて機械の故障を診断して検出し、故障原因の特定を行なう故障診断部21,22,23,26、を備える。
(もっと読む)
サーボモーターの低速制御方法と装置
【課題】サーボモーターの低速制御方法と装置の提供。
【解決手段】サーボモーター1の低速制御方法と装置のサーボモーター1の低速制御装置は、サーボモーター1、エンコーダ2、挿入値計算ユニット3、サーボ制御チップ4、電源モジュール5を備え、エンコーダ2はサーボモーター1から速度の信号を受信し、エンコーダ作業後に、低解析度エンコーダ信号を出力し、挿入値計算ユニット3はエンコーダ2が出力する低解析度エンコーダ信号を受信し、補間数値の方式で低解析度エンコーダ信号を高解析度エンコーダ信号に変化させ、高解析度エンコーダ信号を出力し、サーボ制御チップ4は挿入値計算ユニット3が出力する高解析度エンコーダ信号を受信し、演算処理を経て、スイッチ制御コマンドを出力し、しかも、内部パラメーター設定機能を備え、電源モジュール5はサーボ制御チップ4が出力するスイッチ制御コマンドを受信し、サーボモーター1へと送り、サーボモーター1の速度を調整する。
(もっと読む)
荷役作業用車輛におけるモータ回転速度検出方法と装置
【課題】低速時も高速時も精度良く回転速度を検出する、荷役作業用車輛におけるモータ回転速度検出方法と装置を提供する。
【解決手段】ベアリングセンサから出力されるパルス間隔からモータ回転速度を検出するパルス間隔測定フェーズと、ベアリングセンサから所定時間内に出力されるパルス数を計測してモータ回転速度を検出するパルス計数フェーズとを有し、パルス間隔測定フェーズからパルス計数フェーズへ移行させる回転速度を、パルス計数フェーズ移行閾値として定めると共に、パルス計数フェーズからパルス間隔測定フェーズへ移行させる回転速度をパルス間隔測定フェーズ移行閾値として定め、パルス間隔測定フェーズにおいて回転速度がパルス計数フェーズ移行閾値を上回った状態でパルス計数フェーズに移行し、パルス計数フェーズにおいて回転速度がパルス間隔測定フェーズ移行閾値を下回った状態でパルス間隔測定フェーズに移行するようにした。
(もっと読む)
電動機制御装置と予測制御方法
【課題】機械にあわせてフィードフォワード量を調整して指令に追従させ、制御演算を簡易にして、加減速時のオーバシュートを減らし、一定速度時の追従性を高めた電動機制御装置と予測制御方法を提供する。
【解決手段】位置指令をサンプリング時間毎に保存する位置指令差分バッファ部(21)と、位置指令差分バッファ部の位置指令と電動機位置の位置偏差に基づいて速度指令を生成する予測演算部(22)とを備え、位置指令差分バッファ部は、速度フィードフォワードのみ使用する場合は2段し、トルクフィードフォワードを使用する場合は4段とした。
(もっと読む)
電動機制御装置及びその象限突起補償調整方法
【課題】1軸毎に調整できて、多軸の軌跡情報を解析する必要がなく、多軸用のサーボコントローラが不要で簡単に象限突起補償量を調整できる電動機制御装置及びその象限突起補償調整方法を提供する。
【解決手段】位置制御部11と、速度制御部12と、トルク指令に基づいて電動機を駆動する電動機駆動部と、前記電動機位置の時間差分により前記電動機速度を生成する速度生成部18と、を備えた電動機制御装置1において、1軸分の円弧指令の指令反転前後部分の位置指令を出力する円弧指令作成部15と、位置指令の方向反転後、移動量や時間に応じてトルク指令を補償する突起補償部16と、補償トルク指令を増減して速度制御積分制御部の出力を、最小値或いは所定値以下に小さくなるように調整する突起補償調整部17と、を備える。
(もっと読む)
ロボット
【課題】直流電源装置から出力される直流電圧が異常であると判断するためのサンプリング数を増やすことなく、この直流電圧の異常を精度良く検出できるロボットを提供する。
【解決手段】第2の制御回路26は、エンコーダ12からのフィードバック値に基づくモータ11の現在の回転位置の回転位置指令値に対する偏差に基づいて第1の制御回路25による監視動作を制御する。第1の制御回路25は、この監視動作において、直流電圧Vdに応じた電圧Vdetを所定周期でサンプリングし、サンプリングにより取得した電圧値が所定回数連続して異常電圧値である場合に異常状態信号Sbを出力する。第2の制御回路26は、異常状態信号Sbが入力されると直流電圧Vdが異常であると判断する。
(もっと読む)
サーボモータ制御装置
【課題】種々のインタフェースに対応できる安価なサーボモータ制御装置を提供する。
【解決手段】制御基板3は、CPU8と、エンコーダ6と通信するための所定の標準のシリアル通信仕様に対応する第1シリアルインタフェース9と、リニアスケールヘッド7と通信するための第1シリアルインタフェース9と同じ仕様の第2シリアルインタフェース10と、エンコーダ6との第1シリアルインタフェース9を接続するための第1レベル変換回路11から構成し、フィードバックセンサオプション4にリニアスケールヘッド7と第2シリアルインタフェース10を接続するための第2レベル変換回路12を備える。
(もっと読む)
101 - 120 / 288
[ Back to top ]