
Fターム[5H501LL07]の内容
電動機の制御一般 (20,975) | 検出変量、検出手段 (3,871) | 速度検出 (959) | デジタル値で検出するもの (383) | パルスエンコーダを用いるもの (343)
Fターム[5H501LL07]の下位に属するFターム
Fターム[5H501LL07]に分類される特許
21 - 40 / 288
建設機械
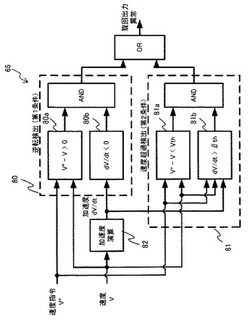
【課題】電子制御系の異常判定に係る誤判定及び検出漏れの発生を抑制できる建設機械を提供すること。
【解決手段】旋回体と、旋回体を駆動する電動モータと、操作信号を操作量及び操作方向に応じて出力する操作装置と、操作信号に基づいて生成された制御信号に基づいて電動モータを制御するインバータ装置と、電動モータの速度を検出するための位置センサと、制御信号が規定する電動モータの速度指令V*から速度Vを減じた値の符号と、電動モータの加速度の符号とが異なる状態を第1条件とし、速度指令と速度の偏差が基準値Vthより大きく、かつ、加速度が基準値βthより大きい状態を第2条件としたとき、第1条件及び第2条件のうち少なくとも一方が成立するか否かを判定する第2コントローラとを備える。
(もっと読む)
画像形成装置及びモータ駆動制御方法

【課題】モータへの励磁以外の方法でキャリッジおよび用紙の位置固定をし、モータへの駆動電力を止めることで印刷時の消費電力を低減する画像形成装置及びモータ駆動制御方法を提供する。
【解決手段】画像形成装置は、主走査部を駆動する第1のモータと、副走査部を駆動する第2のモータと、前記第1のモータ及び前記第2のモータを駆動制御する駆動制御回路とを有する画像形成装置であって、前記駆動制御回路は、ショートブレーキによる前記第1のモータ及び前記第2のモータのホールド制御手段を備える。
(もっと読む)
制御装置
【課題】外乱成分による制御信号の変動を抑制できるとともに、当該制御信号の変動抑制によるフィードバック制御系の応答特性の変動を抑制できる制御装置が求められる。
【解決手段】制御対象の出力が目標値に近づくように制御信号を変化させるフィードバック制御部を備えた制御装置であって、目標値に対して目標値応答予測部の処理を行って第一演算値を算出し、出力に対してノイズ除去フィルタ処理を行って第二演算値を算出し、目標値に対して目標値応答予測部及びノイズ除去フィルタの処理を行って第三演算値を算出し、第二演算値に第一演算値を加算し第三演算値を減算した制御用出力値を算出する処理と数学的に等価な処理を行い、制御用出力値を制御対象の出力として前記フィードバック制御部に入力する制御装置。
(もっと読む)
サーボモータ用ドライブユニット
【課題】ドライブユニット本体及び外部接続ユニットの種類を問わず、これらを任意に選択して相互に組み合わせて使用することを可能にするインタフェースを有する低コストで設計の自由度に優れたサーボモータ用ドライブユニットを提供する。
【解決手段】ドライブユニット本体2と外部接続ユニット4とを相互に組み合わせて、サーボモータを制御することを可能にするインタフェース6を備え、インタフェースは、ドライブユニット本体及び外部接続ユニットの種類に応じて構築されるサーボモータ制御用構成品2a及び外部接続用構成品4aの双方に、着脱自在に接続させる構造に構成可能であり、インタフェースを、サーボモータ制御用構成品及び外部接続用構成品の双方に接続させることで、ドライブユニット本体と外部接続ユニットとを相互に組み合わせて、サーボモータを制御可能にする。
(もっと読む)
電動モータの制御装置およびその制御方法
【課題】加速性も含めた作業操作上の違和感を低減すること。
【解決手段】作業モードを設定するモード切替部と、設定される作業モードによって予め設定される電動モータの最大出力を取得する作業モード・旋回最大出力変換テーブルTB11と、電動モータの回転速度を検出する回転センサと、前記回転速度と前記最大出力とをもとにトルク制限値Tlimを演算するトルク制限値演算部105と、前記電動モータの加速時に、トルク制限値Tlimによって前記電動モータのトルクを制限するトルク制限手段と、を備える。
(もっと読む)
画像形成装置、画像形成装置の制御方法、および画像形成装置の制御プログラム
【課題】装置の小型化を図ることのできる画像形成装置、画像形成装置の制御方法、および画像形成装置の制御プログラムを提供する。
【解決手段】画像形成装置としてのMFPは、縦搬送モータ100と、本体側制御基板200と、センサ1および2とを備えている。縦搬送モータ100において、エンコーダ103は、縦搬送モータ100の回転数に応じた周波数を有するエンコーダ信号405を発生し、センサ信号重畳部113は、センサ1および2の論理状態の入力を受け付ける。センサ信号重畳部113は、センサ1および2の論理状態に基づいて、エンコーダ信号405のデューティ比を変調することにより、エンコーダ信号405にセンサ1および2の論理状態を重畳し、重畳後のエンコーダ信号401を出力する。本体側制御基板200において、センサ信号分離部203は、入力されたエンコーダ信号401を復調することにより、センサ1および2の論理状態を得る。
(もっと読む)
駆動制御装置、画像形成装置、駆動制御方法及びプログラム
【課題】起動時において、機構のバックラッシュ等のギヤの噛合いで生じる衝撃によってエンコーダ等の検出系が加振され、機構の速度や位置が誤検出された場合であっても、フィードバック制御系が安定となるような駆動制御装置、画像形成装置、駆動制御方法及びプログラムを提供すること。
【解決手段】電動機と、前記電動機の出力を伝達する伝達機構部と、前記伝達機構部に連結することで前記電動機の出力により駆動される従動機構部と、前記電動機、前記伝達機構部又は前記従動機構部のいずれか1つの速度又は位置を検出する検出部と、前記検出部の出力値と目標値との偏差の値に基づき、補償器を用いて所定の演算を行う補償器演算部と、前記補償器演算部の結果に基づいて前記電動機を駆動させる電動機駆動部と、を有する駆動制御装置であって、前記補償器演算部に入力する前記偏差の値に制限をかける偏差制限部を有する駆動制御装置によって解決される。
(もっと読む)
モータ制御装置及び画像形成装置
【課題】トルク飽和が生じるにもモータを当初定めた速度まで適切に加速可能とする。
【解決手段】モータ制御ユニットは、制御に使用する目標加速度Arを、加速度プロファイルに従う目標加速度Anに設定する一方、トルク飽和によるモータの加速度上限Amを推定し、目標加速度Anが加速度上限Amを超える場合には、その時点以降、目標加速度Arを、加速度上限Amに設定する。また、当初の加速度プロファイルに従う目標加速度Anが加速度上限Am以下となる時点(時点Tx)で速度ωcを設定し、モータ速度が速度ωcに到達した時点(時点T1)で、モータ速度を加速指令時に指定された加速終了時の速度ωfに調整するための新たな加速度プロファイルを、その時点でのモータの運動状態に基づいて設定する。そして、この時点以降には、この新たに設定した加速度プロファイルに従う目標加速度Azを、使用する目標加速度Arに設定して、モータ制御を行う。
(もっと読む)
モータ制御装置及び画像形成装置
【課題】高速且つ高精度に、駆動対象を目標停止位置に停止可能とする。
【解決手段】モータ制御ユニットは、モータに入力可能な電流上限値を推定し、この上限値に対応する駆動電流でモータを駆動する第一制御処理を、駆動初期において実行する。一方、駆動対象の現動作状態に基づき、第二制御処理に対応するパターンで駆動対象を減速・停止させるのに必要な搬送量である停止必要量Pn=Pc+Pdを算出する。そして、目標停止位置までの残り搬送量Psが停止必要量Pn以下となった時点で、第一制御処理に代えて第二制御処理を実行する。この動作により、第一制御処理を長めに実行して駆動対象を高速に搬送し、第二制御処理では、上記パターンに対応する目標軌跡に追従するように駆動対象の位置P及び速度Vを制御して、駆動対象を精度よく目標停止位置で停止させる。目標軌跡は、減速時の加速度ピークが、モータで実現可能な限界値−Apに設定されてなる。
(もっと読む)
温度推定装置及び温度推定方法
【課題】モータを備える電子機器を構成する機器構成部材の温度の推定精度を向上させることができる温度推定装置及び温度推定方法を提供する。
【解決手段】温度推定部53は、モータ20への入力電力Pinとモータ20からの出力電力Poutとの差分に基づき、モータ20の発熱エネルギ速度Einを演算する発熱エネルギ演算部533と、対象部材の前回の温度推定値Tm(n−1)と雰囲気温度Tfとの差分と、対象部材の熱特性を示す熱係数とに基づき、対象部材からの放熱エネルギ速度Eoutを演算する放熱エネルギ演算部535と、発熱エネルギ速度Einと放熱エネルギ速度Eoutとの差分とに基づき対象部材の温度上昇速度ΔTm(n)を演算する温度上昇量演算部536と、温度上昇速度ΔTm(n)と前回の温度推定値Tm(n−1)とに基づき対象部材の今回の温度推定値Tm(n)を演算する温度推定値演算部537と、を備えている。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】一定期間、予め設定されたトルクを出力させて、モータを目標停止位置に停止させることができるモータ制御装置及びモータ制御方法を提供する。
【解決手段】モータ制御装置10は、トルク指令に基づいて、モータMを駆動する電流を出力する電力変換部12と、モータMの速度指令とモータMのモータ速度との偏差に基づいて、トルク指令を生成する速度制御部14と、モータMの速度制御中に、モータMのモータ位置を検出する位置検出器PGの1回転当たりの基準位置を最初に検出した後、モータMを位置制御する定位置停止制御部20とを備える。
(もっと読む)
ミシン及びミシン制御プログラム
【課題】モータのトルク指令値を算出するためのゲイン値を駆動状況に応じて増減することができるミシン及びミシン制御プログラムを提供する。
【解決手段】ミシンのCPUはミシンモータに対する回転速度の指令値Sを取得する(S11)。CPUはミシンモータの回転速度の検出値Nをエンコーダにより取得する(S12)。指令値Sと検出値Nの偏差ΔNを算出する(S13)。CPUはミシンの駆動状況に応じた増減割合で、ミシンモータのトルク指令値Tを算出するためのゲイン値を偏差ΔNの増減に従って増減する(S14〜S17、S21〜S25)。CPUは設定したゲイン値に偏差ΔNを乗じてトルク指令値Tを算出する(S29)。
(もっと読む)
モータ制御装置
【課題】
エンコーダの分解能が高くなり、出力されたデジタル信号の周波数が高くなったときにも誤動作を起こさないモータ制御装置を提供することを目的とする。
【解決手段】
複数段のDフリップフロップから構成されており、各Dフリップフロップの出力のHレベルの数に応じて出力を決定しノイズを除去することができるデジタルフィルタを備える。これによりエンコーダの分解能が高くなり、出力されたデジタル信号の周波数が高くなった場合にもノイズが効果的に除去可能であり、誤動作が起こりにくいモータ制御装置を提供することができる。
(もっと読む)
駆動制御装置、シート搬送装置、及び、画像形成装置
【課題】駆動対象が後退する方向の負荷がかかる環境下で、駆動対象を変位させて目標停止位置で停止させるような制御を好適に実行可能な技術を提供する。
【解決手段】用紙搬送制御部は、モータを通じて用紙搬送機構が備える搬送ローラを回転させることにより用紙搬送を実現するものであり、用紙搬送方向とは逆方向の負荷がかかる環境下で、用紙を目標停止位置に精度よく且つ高速に停止させるための構成を有する。具体的に、用紙搬送制御部は、実位置と目標位置との偏差に基づき算出された操作量に対応する駆動電流がモータに供給されるようにモータドライバにPWM信号を入力すると共に、用紙が目標停止位置を超えるまではイネーブル信号としてオン信号を入力する。一方、用紙が目標停止位置をオーバーランすると、目標停止位置に戻るまでイネーブル信号としてオフ信号を入力し、モータドライバにモータに対する電力供給を停止させる。
(もっと読む)
過負荷保護を行うモータ制御装置
【課題】多相交流モータの停止時又は低速回転時に多相交流モータの特定の相に集中的に電流が流れた場合にも過負荷保護を行うことができるモータ制御装置を提供する。
【解決手段】第1温度計算部3は、3相交流モータ8の各相の電流値及び熱モデルを用いて各相の温度を計算し、第2温度計算部4は、3相交流モータ8の全相の電流値の二乗平均値を算出し、二乗平均値及び熱モデルを用いて3相交流モータ8の全相の平均温度を計算する。第1温度判定部5は、3相交流モータ8の各相の温度の少なくとも一つが第1温度より高いか否かを判定し、第2温度判定部6は、3相交流モータ8の全相の平均温度が第2温度より高いか否かを判定する。アラーム信号生成部7は、3相交流モータ8の各相の温度の少なくとも一つが第1温度より高く又は3相交流モータ8の全相の平均温度が第2温度より高い場合、3相交流モータ8の駆動を停止するアラーム信号を生成する。
(もっと読む)
モータ制御装置
【課題】DCモータ制御及びACモータ制御の両機能を兼用する際に、DCモータとACモータとの切り替えを、小規模及び低コストにて実現する。
【解決手段】制御部10の磁束電流指令AC/DC切替部11は、磁束指令部121から磁束電流指令を入力し、切替信号を入力し、切替信号がACを示す場合、入力した磁束電流指令を出力し、切替信号がDCを示す場合、予め設定されたデータ0の磁束電流指令を出力する。電気角AC/DC切替部12は、電気角計算部130により計算された電気角を入力し、切替信号を入力し、切替信号がACを示す場合、入力した電気角を出力し、切替信号がDCを示す場合、予め設定された固定の電気角330°を出力する。電圧指令2相−3相変換部131は、DCモータ105を駆動する場合、絶対値が等しく逆相となるU相電圧指令及びV相電圧指令、並びにデータ0のW相電圧指令を生成する。
(もっと読む)
モータ制御装置およびモータ制御方法
【課題】動作中の進行方向に対する振動や偏差を抑えることにより、整定時間を短くすることが可能なモータ制御装置およびモータ制御方法を提供することにある。また、本発明により、理想的な軌跡でモータを動作させることができ、さらに、現在の位置を常にモニタリングすることができるため、複数の軸を同期させて動作させることが容易となる。
【解決手段】進行方向に対する振動に大きく影響する加加速度データからの指令波形を生成する手段と、偏差量に応じて、常に加加速度制限しながら今後の指令波形を再生成するリアルタイム実位置制御を行う手段とを備え、これにより高速でモータが動作する際の進行方向に対する振動や偏差を抑える。
(もっと読む)
モータ制御装置
【課題】モータの挙動に基づいて励磁相のずれを検出し、励磁相のずれを補正する。
【解決手段】伝達機構3は、パーキング位置と、非パーキング位置とに切換えられるマニュアルレバー3aを有する。マニュアルレバー3aは、SR型のモータ12によって駆動される。モータ12の回転位置は、エンコーダ13によって検出される。制御装置11は、エンコーダ13からの信号を計数することによりロータの位置を示すカウント値Nを算出する。制御装置11は、カウント値Nに基づいて励磁相を選択し、モータ12を駆動する。制御装置11は、P位置と非P位置との間の切換え速度に基づいて、励磁相をずれを検出し、励磁相のずれ方向を判定する。さらに、制御装置11は、検出された励磁相のずれを補正する。励磁相学習処理および壁当て処理を含む初期化処理だけに依存することなく、励磁相のずれを検出し、補正することができる。
(もっと読む)
回転制御装置及び回転制御方法
【課題】 コンパクトな構成で作業台の回転制御の精度の向上を図ることができる回転制御装置及び回転制御方法を提供する。
【解決手段】 回転体の回転に連動して回転するロータリーエンコーダの読取信号を処理して回転ムラ信号と回転ブレ量信号とを生成し、回転駆動部において回転ムラ信号に応じて回転体の回転速度サーボ制御をなすステップと、処理部において回転ブレ量信号に応じてワークに対する位置サーボ制御をなす。
(もっと読む)
制御装置、および測定装置
【課題】制御性能を向上させる制御装置、および測定装置を提供する。
【解決手段】駆動制御回路3は、測定子を変位させる駆動機構25を駆動制御し、駆動機構25に流れる電流を検出する電流検出センサ27と、駆動機構25を駆動させる駆動速度に応じた目標電流を設定する速度制御部32と、目標電流および電流検出センサ27により検出された検出電流の電流偏差に、積分ゲインおよび比例ゲインをかけて駆動機構25に出力する出力電流を設定する電流制御部33と、を具備し、電流制御部33は、駆動機構25の駆動速度に応じて、積分ゲインおよび比例ゲインのうちの少なくともいずれか一方を切り替える。
(もっと読む)
21 - 40 / 288
[ Back to top ]