
Fターム[5H501LL07]の内容
電動機の制御一般 (20,975) | 検出変量、検出手段 (3,871) | 速度検出 (959) | デジタル値で検出するもの (383) | パルスエンコーダを用いるもの (343)
Fターム[5H501LL07]の下位に属するFターム
Fターム[5H501LL07]に分類される特許
41 - 60 / 288
モータ制御装置
【課題】制御遅延や電流応答遅延が発生しても遠心力低減効果が低下せず、適切な軸位置指令値を求めるのに大きな負担を必要としないモータ制御装置を提供する。
【解決手段】振れ回り抑制制御部30において、ローパスフィルタLPFによって軸変位検出値dqから軸の回転周波数に同期した直流成分の信号のみを抽出し、周期外乱オブザーバ50によって前記直流成分の信号に基づいて外乱を推定し、前記推定した外乱を抑制する軸変位指令値α*,β*を演算する。そして、前記振れ回り抑制制御部30で演算された軸変位指令値α*,β*を軸支持制御部20に入力する。
(もっと読む)
モータ制御装置

【課題】複数のユニットを有するモータ制御装置において、大きな負担を必要とせずに、モータ軸の振れ回りを抑制する。
【解決手段】軸変位検出値α1,β1,α2,β2から、軸変位検出値の並進運動成分αp,βpと回転運動成分αr,βrとを求め、前記並進運動成分αp,βpと回転運動成分αr,βrのそれぞれについて、ローパスフィルタLPF1によって、軸の回転周波数に同期した直流成分の信号のみを抽出し、周期外乱オブザーバ50a,50bによって前記直流成分の信号に基づいて外乱を推定し、前記推定した外乱を抑制する軸変位指令値の並進運動成分αp*,βp*と回転運動成分αr*,βr*を演算する。そして、軸支持制御部20において、軸変位指令値の並進運動成分αp*,βp*と回転運動成分αr*,βr*に基づいて、各モータの軸変位指令値を算出する。
(もっと読む)
サーボモータのコイル温度検出装置、およびサーボモータ
【課題】モータ動作時にコイル温度の推定値を正確に行えるサーボモータのコイル温度検出装置、およびサーボモータを提供することを目的としている。
【解決手段】モータに流れる電流値を、前記モータに発生する誘起電圧に基づく回転速度値に基づき補正する電流補正部(101〜103)と、前記モータに印加される電圧の指示値と、前記補正された電流値とを用いて、逐次最小二乗法により、前記モータのコイルの抵抗値を推定する抵抗値推定部(104〜106)と、前記推定された抵抗値に基づき、前記モータのコイルの温度を判別する温度判別部107とを備える。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】 剛性の低いベルトを力伝達手段として含む運動機構におけるベルトの弾性変形の補正を行って、軌道と軌跡とのずれ量を小さくできるモータ制御装置及び制御方法を提供する。
【解決手段】 位置指令をプレフィルタ3に通し、その後位置指令と位置フィードバックとの偏差をとり、位置制御部2に通して速度指令を算出する。速度指令と速度との偏差をとり、速度制御部7に通し、トルク指令を算出する。このトルク指令を元に、トルク制御部8内の電力変換器を通してモータを駆動する。また、トルク指令とモータ速度から負荷トルクオブザーバ9により負荷トルクを推定し、この負荷トルクに対し、運動機構の作用点の軌道に応じた弾性変形補償のための補償ゲインを乗算し補償量を求める。この補償量を振動抑制フィルタ13に通して位置偏差に加算する。
(もっと読む)
サーボアンプの制御ループゲイン調整方法、プログラム及びロボット制御装置
【課題】ロボット動作中のサーボアンプの電源電圧の変動に対して簡易な制御で制御ループを安定化させる。
【解決手段】ロボットの各関節に設けられたサーボモータに対して外部からの制御指令に応じた該サーボモータの制御量を帰還させて制御ループを形成するサーボアンプの制御ループゲイン調整方法であって、前記制御ループゲインのデフォルト値及び前記サーボアンプの電源電圧のデフォルト値に基づいて、前記制御ループを形成するとともに前記サーボモータの駆動を開始する工程と、前記サーボアンプの電源電圧を検出する工程と、前記制御ループゲインを構成する制御ゲインのうち前記サーボアンプの電源電圧と相関して変化する制御ループゲインを、検出した前記サーボアンプの電源電圧の変化に対して逆方向に変化するように調整する工程と、を備える。
(もっと読む)
モータ制御装置、モータ制御方法、プログラム
【課題】 装置やモータの起動直後など、パルス信号の1周期の区間が検出されるまでは精度の良い速度情報を取得することができなかった。一方で、常に1/4周期のパルス信号に基づいて速度情報を得ようとすると、パルス信号に劣化が生じたときに算出される速度情報の精度が良くないため、あまり好ましくない。
【解決手段】エンコーダの両相両エッジをカウントし、1周期に満たない際はカウント値に応じて補間演算を行うことで駆動速度を取得して、高精度なモータ制御を可能とする。
(もっと読む)
電力変換装置
【課題】電動機の運転開始前に、エンコーダの光学センサの異常を検出可能とする。
【解決手段】半導体スイッチの駆動信号を生成する制御装置を有し、エンコーダの二相の出力信号から演算した回転速度を制御装置にフィードバックして前記駆動信号を生成する電力変換装置において、エンコーダ10の出力信号に基づいて配線系統の異常等を検出したときに、電動機200を停止させる安全遮断信号を制御装置50に送出する安全機能装置40を備え、制御装置50は、運転開始前に安全機能装置40からテスト開始指令が入力されたときに、電動機200の固定子巻線の線間に短期間だけ直流電圧を印加して回転子にトルクを発生させるための制御演算器51を有し、安全機能装置40は、前記直流電圧の印加期間内にエンコーダ10の出力信号が変化しないときはエンコーダ10内部の光学センサの異常と判断して安全遮断信号を出力する。
(もっと読む)
インバータ制御装置および電力変換システム
【課題】所定期間内に加速や減速等のような回転数の変動が生じる場合であっても、従来より正確に角度補正ができるようにする。
【解決手段】インバータ制御装置60は、レゾルバ41(第1角度検出器)によって出力される回転電機40の回転角度に関する信号情報に基づいて理想角度と回転角度との誤差を補正する誤差補正手段67と、レゾルバ41によって出力される信号情報に基づいて基準角度θsを検出する基準角度検出手段66と、基準角度検出手段66によって検出される基準角度θsに基づいて検出角度θdとの誤差を補正する基準となる基準周期Tsを決定する基準周期決定手段68とを有する。誤差補正手段67は、基準周期決定手段68によって決定される基準周期Tsに基づいて理想角度を推定し、推定した理想角度とレゾルバ41によって出力される信号情報に基づいて検出される検出角度θdとの誤差を補正する。
(もっと読む)
部品実装装置および部品実装装置におけるモータ制御方法
【課題】過負荷状態の確実な防止と動作効率の維持向上を両立させることができる部品実装装置および部品実装装置におけるモータ制御方法を提供すること。
【解決手段】モータの負荷状態を負荷検出部によって検出して監視し、負荷率が当該モータの定格負荷に基づいて予め設定された基準負荷率を超えた場合には、負荷率が予め設定された低減率Δp1で減少するようにモータの回転速度・回転加速度の組み合わせで規定される駆動パラメータを変更させる負荷低減処理を行い、負荷率が低減された状態で部品実装作業を継続実行する過程において、負荷率が基準負荷率を超える状態が発生しなかった場合には、負荷率が予め設定された回復率Δp2で段階的に増加するように駆動パラメータを変更する負荷率回復処理を反復して行い、負荷率が再度基準負荷率レベルを超えた場合には、直前の負荷率に戻してこの負荷率を確定駆動パラメータとして設定する。
(もっと読む)
数値制御装置及び摩擦補償方法
【課題】ダブルナット予圧方式の送り駆動機構においても低速から高速の領域まで摩擦力又は摩擦トルクを高精度で推定して象限突起を補正できる数値制御装置及び摩擦補償方法を提供する。
【解決手段】本発明の数値制御装置はオーバーサイズボール予圧方式だけでなく、ダブルナット予圧方式の送り駆動機構においても低速から高速の領域まで摩擦力又は摩擦トルクを高精度で推定する。故に数値制御装置は象限突起を補正できる。象限突起は指令軌跡よりも移動軌跡が外側に出る現象である。ダブルナット予圧方式の送り駆動機構はボール螺子軸が反転して一山目の象限突起を生じる。ダブルナット予圧方式の送り駆動機構はテーブルが反転後所定量移動した時に更に二山目の象限突起を生じる。数値制御装置はダブルナット予圧方式の時に二段階で生じる摩擦力の上昇を二つの近似式を用いて高精度に推定できる。
(もっと読む)
サーボモータの制御装置および制御方法
【課題】制御パラメータを変更することでフィードバックループに発振が生じたとしても、速やかに発振を停止させる。
【解決手段】フィードバックループの発振を検知し、発振検知信号を出力する発振検知部と、フィードバックループの制御パラメータの設定を、発振検知信号に基づき操作指示するパラメータ操作部と、制御パラメータを設定するための設定値が供給され、パラメータ操作部の操作指示に応じて更新しながら制御パラメータをフィードバックループに設定する更新部とを備え、発振検知信号が発振を検知していないことを示すとき、パラメータ操作部は更新部に対して、供給された設定値に応じた制御パラメータを設定するよう操作指示し、発振検知信号が発振を検知したことを示すとき、パラメータ操作部は更新部に対して、フィードバックループの周波数帯域幅が狭くなるような制御パラメータを設定するよう操作指示する。
(もっと読む)
サーボ制御器
【課題】2自由度制御構成のサーボ制御器において、用いる位置検出器の分解能が低くてもフィードフォワード制御器からフィードバック制御器へ与える操作量に生ずるリップルを確実に低減でき、高い追従性による高精度制御を可能にするサーボ制御器を得ること。
【解決手段】指令生成器10は入力される位置指令Aをコントローラ2の分解能から位置検出器5の分解能よりも高い分解能の内部位置指令150へ変換する。フィードフォワード制御器11aは、内部位置指令150を元に微分器110、フィルタ111を用いて速度フィードフォワード成分152を生成し、それを元に微分器112、フィルタ113を用いてトルクフィードフォワード成分154を生成する。内部位置指令150の分解能は位置検出器5の分解能よりも高いので、フィードフォワード成分152,154に生ずるリップルは位置検出器5の分解能を有する内部位置指令を用いる場合よりも低減される。
(もっと読む)
モータ制御装置
【課題】使用者が遊び感覚等で電源スイッチのオン/オフの切換操作を繰り返しても、通電相学習処理によるモータ又はモータ駆動回路の発熱を抑えてモータ又はモータ駆動回路の寿命低下や故障を未然に防止する。
【解決手段】電源投入後の初期駆動時に、モータ14の通電相の切り換えを所定のタイムスケジュールで一巡させてエンコーダ61のパルス信号をカウントし、初期駆動終了時のエンコーダカウント値とモータ14の回転角度と通電相との対応関係を通電相学習値として学習し、その後の通常駆動時に、エンコーダカウント値と通電相学習値とに基づいて通電相を決定する。電源スイッチ72のオフ操作後も所定時間が経過するまでECUリレー73をオン状態に維持してレンジ切換ECU20への電源供給を継続し、電源スイッチ72のオフ操作後に電源オン状態を継続する期間に電源スイッチ72がオン操作されても通電相学習処理を実行しない。
(もっと読む)
モータ制御装置
【課題】モータの電源電圧の変動や巻線温度の上昇等によってモータの駆動電流が変動しても、モータを精度良く目標回転角度で停止できるようにする。
【解決手段】モータ14の回転角度が目標回転角度に対して所定角度以内に近付いてからモータ14の回転速度を減速する際に、モータ14の電源電圧又は巻線温度(モータ14の駆動電流の流れにくさ)に応じて前記所定角度(減速開始点)を変更する。これにより、モータ14を精度良く目標回転角度で停止させるのに必要な減速区間(制動距離)を確保する。
(もっと読む)
モータ制御装置
【課題】高速且つ高精度に駆動対象を所望状態に移行させることが可能なモータ制御技術を提供する。
【解決手段】制御システム1のモータ制御ユニット60は、第一制御ユニット70及び第二制御ユニット80を備え、制御プロセス初期においては、第一制御ユニット70から出力される電流指令値U1をモータドライバ30に入力し、制御プロセス後期においては、電流指令値U1に代えて、第二制御ユニット80から出力される電流指令値U2を、モータドライバ30に入力する。第一制御ユニット70は、逆起電力による電流低下を加味して電流上限値Umaxを推定し、これを電流指令値U1として出力するものであり、モータ20の高速駆動を実現する。一方、第二制御ユニット80は、フィードバック制御系及びフィードバック制御系から構成され、制御プロセス後期において動作して、モータ20を高精度に駆動制御し、高精度に駆動対象を目標とする状態に移行させる。
(もっと読む)
サーボシステム
【課題】モータの回転情報を検出するエンコーダと、エンコーダからの位置情報を用いて速度を求める制御装置からなるサーボシステムにおいて、低速回転時でも精度よく速度検出を行うことができるサーボシステムを提供する。
【解決手段】位置検出器で検出した位置検出データが変化した場合に位置検出データを記憶するデータ記憶器と、データ記憶器で記憶した位置検出データと、位置検出器で検出した最新の位置検出データを比較し、位置検出データが変化した場合に位置検出データの変化量と変化するまでの時間をカウンタで計数し、位置検出データの変化量をカウンタで計数したカウンタ計数値で除算し速度を検出する。
(もっと読む)
サーボ制御装置および画像形成装置、並びにサーボ制御プログラム
【課題】サーボ機構のジャム判定において、制御対象を駆動する駆動力に対して閾値を設けたジャム判定を実現すること。
【解決手段】駆動体の速度を測定する速度測定部と、前記駆動体を駆動する目標速度を記憶する目標速度保持部303と、電圧制御またはPWM制御を実行する際に、速度測定部により測定された速度と、目標速度保持部に記憶された目標速度との差に応じてDCモータを駆動制御する駆動制御部と、駆動制御部によりDCモータを駆動させた場合に、前記駆動体と異物との干渉によりモータトルクが異常値になったことを検出するモータトルク異常検出部301と、を備え、モータトルク異常検出部301は、DCモータの回転数と電圧またはPWM制御Duty比から算出した値によってモータトルクが異常値であることを検出する。
(もっと読む)
モータ制御装置
【課題】モータ停止中において、モータの推定温度の算出処理に掛かる作動電力の低減を図ることができるモータ制御装置を提供する。
【解決手段】パワーウインドウ装置において、モータ停止中にイグニッションスイッチ信号がOFF信号になると、制御部の作動モードを通常作動モードからスリープモードへ切り替え、スリープ制御回路からのウェイクアップ信号を受けとると、アクティブ時間だけアクティブ状態に復帰した後に再び自動的にスリープ状態に移行し、外部からウェイクアップ信号を受けとると、作動モードをスリープ状態から通常作動モードに切り替える。また、スリープモードにおいてアクティブ状態に復帰する間に、推定温度算出手段が、減算温度データに基づいて、推定温度記憶手段に記憶された推定温度に対応する減算温度にて当該推定温度を補正して新たに算出し、推定温度記憶手段に記憶した推定温度を、新たに算出した推定温度に更新する。
(もっと読む)
プレス機械、および、プレス機械の制御方法
【課題】サーボプレス機械において、ユーザの生産目的に合わせた動作指定を事前におこない、サーボモータの回転数と出力トルク特性に応じて、加減速の制御をおこなえるようにする。
【解決手段】弱め界磁制御を始める回転数の動作モードである動作優先モード、それより小さな回転数の動作モードである客先優先モード、それより大きな回転数の動作モードである生産優先モードのいずれかの動作モードを設定する。そして、設定された動作モードに応じて、最高非加工速度、加減速時定数、加減速終端丸め定数からなるサーボパラメタによりサーボモータに対してサーボ制御をするように設定する。客先優先モードでは、加減速時定数を小さくし、加減速の変化を大きくして、生産優先モードでは、加減速時定数を大きくして、加減速の変化を小さくする。
(もっと読む)
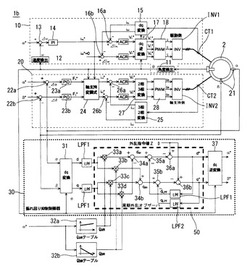
電動機の制御装置
【課題】高速域における位相ずれを防止して高精度な速度制御を可能にする。
【解決手段】第1の制御周期に従い速度制御を行って電動機の電流指令を生成する速度制御系と、第2の制御周期に従い電流制御を行って電力変換器の出力電圧指令を生成する電流制御系と、電力変換器の出力電圧位相を用いて出力電圧指令及び電流検出値を座標変換する手段と、を備えた制御装置において、ラッチ信号作成部21、エッジ保持部26、回転方向検出部32及び保持部33、時間計測カウンタ23、ラッチ25−1〜25−4、エッジ変化情報保持部29と、回転方向,時間計測値及びエッジ変化情報を用いて回転速度を演算するCPU30と、出力パルスのエッジのうち少なくとも一つのエッジの数をカウントするカウンタ41と、そのカウント値を第2の制御周期ごとに保持するラッチ42と、前記カウント値から出力電圧位相を演算するCPU30内の位相演算手段と、を有する。
(もっと読む)
41 - 60 / 288
[ Back to top ]