
Fターム[5H501LL36]の内容
Fターム[5H501LL36]に分類される特許
1 - 20 / 120
モータ制御装置及びモータ制御方法
位置検出装置、回転式アクチュエータ、および、それを用いたシフトバイワイヤシステム
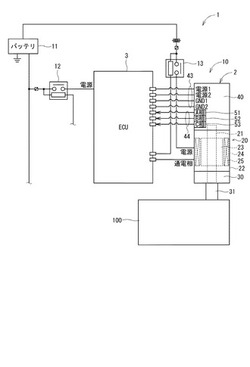
【課題】パルス信号の出力に関する異常が生じても可動部材の位置の検出を継続可能な位置検出装置を提供する。
【解決手段】エンコーダ40は、モータ軸21が回転するのに応じ、所定の位相差を有する3相のパルス信号を出力する。ECU3は、カウント値を保持し、エンコーダ40が出力する3相のパルス信号のすべてが正常のとき出現する各パルス信号の組み合わせパターンである正常時パターン、および、3相のパルス信号のうち1相のパルス信号が異常のときのみ出現する各パルス信号の組み合わせパターンである異常時パターンに基づき、前記カウント値に対し第1所定値「1」、または、第2所定値「2」を加算または減算する。ECU3は、前記カウント値に基づき、モータ軸21の回転位置を検出する。
(もっと読む)
モータ制御回路及び該回路を実装したサーボ装置

【課題】モータ駆動制御用の駆動周波数を任意に変更して所望の操作感覚でサーボ装置を操縦すること。
【解決手段】受信機20を介して送信機10から制御信号として周波数設定信号を受信すると、予め記憶した駆動周波数設定情報のうち、受信した周波数設定信号に応じた情報を選択する。また、送信機10から制御信号である操縦信号を入力すると、選択された駆動周波数設定情報に基づき、パルス幅比較部34bから差分データタイミング信号に同期して取り込んだ差分データ信号を、選択された駆動周波数に対応するように周波数変換処理する。そして、得られた差分データ変換信号を周波数処理情報に基づき所定のカウント範囲まで使用して駆動信号を生成し、駆動機構32の駆動制御を行う。
(もっと読む)
制御装置及び撮像装置及びその制御方法
【課題】PWM駆動制御による出力不感帯においても、フィードバック制御を正確に行うことができ、手ぶれ補正処理の精度向上をより一層図ることのできる撮像装置を提供する。
【解決手段】本発明の撮像装置は、撮像素子101を有して撮影光軸に直交する方向にモータにより可動される可動部1251と、撮像素子の位置を検出値として検出する位置検出部1252と、手ぶれによる撮像装置本体の振れ量に対応する目標値を検出する目標値算出部1241と、PWM駆動制御を用いてフィードバック制御を行うために検出値と目標値との差を演算してデューティ比を求める演算部1043と、モータ1255にデューティ比に応じた電流を流すことにより可動部1251を駆動する駆動部1254とを有する。演算部1043には、検出値と目標値との差により求められたデューティ比を補正することにより出力不感帯を除去する補正部1043Hが設けられている。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータの回転角速度に基づいて精確に電動モータを制御することのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、モータ方程式に基づいて電動モータの回転角速度を算出する。そして、電動モータの運動状態に基づいてモータ方程式の近似式を算出し、この近似式に基づいてモータ方程式の逆起電圧定数を更新する。電動モータのトルクが付与される駆動体の動作に応じて信号を出力するセンサと、センサの出力信号に基づいて電動モータの回転角速度の演算値を算出する演算器とを備え、電動モータの電流の測定値が所定範囲内のとき、電動モータの電圧の測定値および前記回転角速度の演算値を記憶し、記憶した電圧の測定値の数または回転角速度の演算値の数が所定数以上のとき、近似式を算出する。
(もっと読む)
画像形成装置及びモータ駆動制御方法
【課題】モータへの励磁以外の方法でキャリッジおよび用紙の位置固定をし、モータへの駆動電力を止めることで印刷時の消費電力を低減する画像形成装置及びモータ駆動制御方法を提供する。
【解決手段】画像形成装置は、主走査部を駆動する第1のモータと、副走査部を駆動する第2のモータと、前記第1のモータ及び前記第2のモータを駆動制御する駆動制御回路とを有する画像形成装置であって、前記駆動制御回路は、ショートブレーキによる前記第1のモータ及び前記第2のモータのホールド制御手段を備える。
(もっと読む)
自動扉制御装置、自動扉システム、自動扉制御方法及び自動扉調整方法
【課題】自動扉が傾いた場所に設置された場合であっても、扉の開動作及び閉動作を所定の時間で行うことができる自動扉制御装置、自動扉システム、自動扉制御方法及び自動扉調整方法を提供する。
【解決手段】モータ駆動装置29の駆動制御部41は、カウンタ部44の記憶部Cnt2A、Cnt2B、Cnt4に予め設定された切替条件に従って、移動速度を切り替えながら自動扉の開又は閉動作を行い、自動扉の移動開始位置から移動停止位置までの移動時間をタイマ部45にて測定する。測定した移動時間が仕様などに規定された所定時間より短い/長い場合、減速開始点補正部46にて自動扉の高速移動から減速移動への切り替えを早める/遅らせるよう、切替条件の変更を行う。
(もっと読む)
主軸駆動用モータの制御装置
【課題】主軸にかかる負荷が大きい場合はモータと主軸との間にスリップが発生し、主軸位置検出結果をモータ速度のフィードバック制御に利用するとモータ速度の制御が不安定になるという問題が生じていた。
【解決手段】本発明の制御装置は、位置指令値に従って電流指令値を出力する速度制御部と、モータに流れる電流を検出する電流検出部と、電流に基づいてモータの第1速度を推定する第1速度推定部と、主軸の近傍に設けられたセンサにより検出される主軸位置に基づいて算出される主軸速度及び変速比に基づいてモータの第2速度を推定する第2速度推定部と、モータ負荷の値を算出する負荷演算部と、を有し、速度制御部は、モータ負荷の値が所定の値以上の場合は第1速度を用いて電流指令値を算出し、モータ負荷の値が所定の値未満の場合は第2速度を用いて電流指令値を算出する、ことを特徴とする。
(もっと読む)
可変バルブタイミング制御システムのモータ回転状態検出系異常診断装置
【課題】モータ駆動式の可変バルブタイミング制御システムにおいて、モータ回転状態検出系の異常診断の誤判定を未然に防止する。
【解決手段】エンジンのクランク軸10の回転速度の1/2の回転速度に対してモータ18の回転速度を調整することでクランク軸10に対するカム軸13の回転位相(カム軸位相)を変化させてバルブタイミングを変化させる。モータ18を駆動するEDU23は、モータ回転位置に応じた位置信号とモータ回転方向に応じた方向信号をECU22に出力する。モータ回転速度が小さくなると、位置信号や方向信号のエッジを検出できないためにモータ回転状態検出系の異常診断を誤判定する可能性がある。この対策として、ECU22は、カム軸位相変化速度とエンジン回転速度に基づいてモータ回転速度を推定し、モータ回転速度が0付近の所定範囲内にあるときに異常診断を禁止する。
(もっと読む)
制御弁の制御装置
【課題】電動アクチュエータから制御弁に付与される駆動力が微小変動するような状況を少なくし、電動アクチュエータの構成部品の磨耗や劣化の進行を抑制する。
【解決手段】電動アクチュエータ12によって駆動される制御弁10は所定の開度に付勢されている。その開度を制御する制御ユニット21は、制御弁10の目標開度と検出された開度との偏差に応じてアクチュエータ12を操作する。該偏差の絶対値が所定値よりも小さいという条件を少なくとも含む所定の必要条件が成立している場合に、アクチュエータ11への電源供給を遮断し、目標開度又は検出された開度と上記所定の開度との偏差の絶対値が所定値以上である場合には、アクチュエータ11の電源供給を継続する。
(もっと読む)
モータ制御装置、モータ制御方法、及び制御プログラム
【課題】位置制御ゲインを切り替える際の位置偏差を低減させ、整定時間を短縮する。
【解決手段】モータ制御装置は、モータを用いて対象物を目標位置に移動させる際に用いる加速度指令値を時系列に示す加速度パターンを生成し、生成した加速度パターンに対して、モータの応答特性に応じてモータの駆動速度を減速する期間を延ばす変更をし、変更した加速度パターンから位置指令値を出力する指令生成部と、指令生成部が出力する位置指令値と、対象物の目標位置との位置偏差に対する比例制御を用いてモータを駆動するとともに、対象物が目標位置の近傍に達したときに比例制御における比例制御ゲインを現在値より大きい値に変更する制御部とを具備する。
(もっと読む)
モータ制御装置および方法
【課題】車両の条件に応じてCVVLシステムの空気量制御およびエンジン性能を定義するバルブリフトの制御を実行するためのモータ制御装置および方法を提供する。
【解決手段】本発明のモータ制御装置は、バルブリフト測定値とバルブリフト目標値を用いて可変バルブリフト装置制御のためにモータへの制御有無を決定し、モータを制御するためにバッテリ電圧と予め定められた基準電圧範囲を比較し、バッテリ電圧が基準電圧範囲に含まれる場合にバッテリ電圧に対応する電圧因子を決定した後、予め定められた基準信号値に電圧因子を適用してモータに対する駆動信号値を決定する。
(もっと読む)
アクセルペダル装置
【課題】アクティブ制御機構の駆動源としてトルクモータを用いても、トルクモータの回動角度を検出する手段を設けることなく、確実にトルクモータを制御することができるアクセルペダル装置を提供する。
【解決手段】アクセルペダルの操作に対して操作反力を付与するトルクモータ31と、アクセルペダルのアクセル開度を検出し、当該アクセル開度を上位装置であるECU50に出力するAPS(アクセルペダルポジションセンサ)15と、トルクモータ31の駆動を制御して操作反力を付与するコントロールユニット40とを備えるアクセルペダル装置10であって、コントロールユニット40はECU50から操作反力の付与を指令されると、アクセル開度に基づいてトルクモータ31の駆動を制御して操作反力を付与する。
(もっと読む)
モータ制御装置
【課題】モータ側の出力軸とレンジ切換機構のマニュアル軸との嵌合連結部に遊びが存在するシステムにおいて、レンジ切換機構の制御精度を確保できるようにする。
【解決手段】予め設定された遊び量(製造ばらつき上限品における嵌合連結部の遊び量θBmax)の1/2に相当する回転角度量(θBmax/2)を補正値として設定し、目標レンジにシフトする際に、目標レンジに対応する目標出力軸回転角θ3tg を設定して、出力軸14aが目標出力軸回転角θ3tg よりも補正値(θBmax/2)だけ余分に回転されるように目標出力軸回転角θ3tg を補正して仮想目標出力軸回転角θ2tg を設定し、出力軸14aの回転角をこの仮想目標出力軸回転角θ2tg に制御する。これにより、ローラ27の駆動停止位置の制御誤差を遊び量最大値θBmaxの1/2以下に抑えることができると共に、遊び量を学習する処理を行う必要がなく、制御回路の演算負荷を軽減することができる。
(もっと読む)
モータに供給する電流の時系列データを生成するプログラム、方法、装置及びレーザ加工装置
【課題】モータに印加される電圧を飽和させない電流の時系列データを得るのに有利な技術を提供する。
【解決手段】対象物を移動させるモータを含む制御系を第1状態から第2状態へ遷移させるために前記モータに供給する電流の時系列データをコンピュータに生成させるプログラムであって、前記コンピュータに、前記時系列データにより前記モータに印加される電圧の絶対値の最大値を制約する条件を含む制約条件を設定させ、前記時系列データを評価するための評価関数を設定させ、前記制約条件を満たすように、且つ、前記評価関数の値が所定の条件を満たすように、前記時系列データを求めさせる、ことを特徴とするプログラムを提供する。
(もっと読む)
モータ及び揺動コンベヤ
【課題】揺動コンベヤを駆動し、揺動コンベヤのトレーの前進速度、後退速度及び加速度を簡単に変更することができるモータの提供。
【解決手段】所定角度回転する都度パルス信号を出力する手段24を有し、その出力したパルス信号に基づき、回転速度を制御するモータ23。モータ軸又はモータ軸に連動する回転軸に設けられた基準点を検出する基準点検出器43と、基準点検出器43が基準点を検出してから、パルス信号又はパルス信号に基づく信号を計数する計数手段22aと、回転速度を、基準点検出器43が基準点を検出したときにN2とし、計数手段22aの計数値がC1に到達したときに加速してN1(>N2)とし、計数手段22aの計数値がC2(>C1)に到達したときに減速してN2とし、基準点検出器43が基準点を再度検出したときに、計数手段22aをリセットする速度制御手段22とを備えている。
(もっと読む)
撮像装置
【課題】省電力とノイズ低減とを両立する撮像装置を提供する。
【解決手段】撮像装置は、撮像素子と、撮像素子上に被写体像を形成する少なくとも1つのレンズと、制御信号に基づいて少なくとも1つのレンズを駆動するアクチュエータと、制御信号を出力するドライバであって、撮影時の被写体条件に応じて、アナログ制御信号を出力するかデジタル制御信号を出力するかを切り替えるドライバとを備えている。
(もっと読む)
直列弾性アクチュエータの力およびインピーダンスのロバスト制御のための構成
【課題】力誤差を計算することなく、または、直接的に弾性SEA素子をひずみゲージで測定することなく、SEAにより付与されるトルクを制御するためのSEA構成に関する。
【解決手段】SEA構成30は、弾性バネ36の一端部に連結されるモーター32と、弾性バネの反対側の端部に連結される負荷38とを有する。モーターはバネを通じて負荷を駆動する。モーターのシャフトおよび負荷の向きは、位置センサにより測定される。位置センサからの位置信号は、埋め込みプロセッサ44に送られ、モーターシャフトに対する負荷の向きを決定し、バネ上のトルクを決定する。埋め込みプロセッサは、リモートコントローラ46から参照トルク信号を受け取る。埋め込みプロセッサは、所望のジョイントトルクについて高速サーボループを動作させる。リモートコントローラは、インピーダンスまたは位置決め目標物により高次の目標物に基づいてジョイントトルクを決定する。
(もっと読む)
ロボットアームの回転駆動装置
【課題】減速機の回転軸の位置決め精度を高めると共に、トルク制御によってロボットアームの振動を抑制し、静定時間を短縮する。
【解決手段】第1の角度検出部10Aは、サーボモータ1の回転軸の回転角度を検出し、その検出結果を減速機13の減速比Nで除算して得られる第1の回転角度値θmを出力する。第2の角度検出部17Aは、減速機13の回転軸の回転角度を検出し、その検出結果である第2の回転角度値θgを出力する。トルク計算部25は、第1の回転角度値θmと第2の回転角度値θgとの角度差θdiffに減速機13のねじり剛性Kを乗算して、減速機13の回転軸に作用するトルク値Tを算出する。角度制御部24は、角度指令値θgrefと第2の回転角度値θgとの差分に基づいてトルク指令値Trefを生成する。トルク制御部26は、トルク指令値Trefとトルク値Tとの差分に基づいて電流指令値Irefを生成する。
(もっと読む)
モータ駆動装置
【課題】速度制御から位置制御への切替をシームレスに行い、機械伝達系に衝撃を与えないモータ駆動装置を提供。
【解決手段】位置指令生成手段と位置指令フィルタ手段と速度フィードフォワード手段と位置制御手段と速度制御手段と速度制御時指令位置算出手段と位置/速度制御切替手段と指令位置切替手段とを備え、前記速度制御時指令位置算出手段においてモータ駆動装置から前記上位コントローラへの伝送遅れ時間の間のモータ移動量と、前記上位コントローラからモータ駆動装置への伝送遅れ時間の間のモータ移動量とを現在位置に加算して前期速度制御時指令位置とし、速度制御から位置制御への切替時において前回の前記速度制御時速度指令から算出される位置偏差量を位置偏差の初期値とするとともに、前記位置指令生成手段において前記位置偏差量を現在位置に加算したものを位置制御時指令位置の初期値として設定した後、前記目標位置指令による位置制御を行う。
(もっと読む)
1 - 20 / 120
[ Back to top ]