
Fターム[5H505BB10]の内容
交流電動機の制御一般 (51,584) | 目的 (3,865) | その他 (766)
Fターム[5H505BB10]に分類される特許
61 - 80 / 766
モータの制御装置
【課題】少なくとも1つの相に温度センサが設けられ、少なくとも1つの相に温度センサが設けられていない多相のモータにおいてコイルの保護処理を適切に実行する。
【解決手段】少なくとも1つの相(V相)に温度センサ72が設けられ、少なくとも1つの相(U相及びW相)に温度センサ72が設けられていない多相のモータMG2に対して、モータMG2に電流が流れ、回転が止められている状態であるモータロック時において、温度センサ72が設けられている相(V相)に流れる電流の絶対値が、温度センサ72が設けられていない相(U相及びW相)に流れる電流の絶対値以上となる回転位相範囲となるようにモータMG2の回転子をずらすモータの制御装置とする。
(もっと読む)
電力変換器制御装置

【課題】多重巻線型電動機に接続した複数の電力変換器を制御する電力変換器制御装置において、電力変換器で発生するスイッチング損失を抑え、かつ電力変換器で発生する複数の低次の高調波成分を低減する。
【解決手段】電力変換器制御装置1は、多重巻線型電動機4の回転子の磁極位置を検出する位置検出器22と、電動機4の巻線群に対応した電圧指令を発生する電圧指令部11、17と、電圧指令から変調率を演算する変調率演算部13、19と、磁極位置信号から電動機4の回転速度を演算する速度演算部14と、変調率と電動機4の回転速度とに基づき、電力変換器2、3のスイッチング素子のスイッチングのパルスパターンを演算するパルスパターン演算部15、20と、電圧指令とパルスパターンと磁極位置信号に基づき、電力変換器2、3を駆動するゲートパルス出力部16、21とから構成される。
(もっと読む)
回転機の制御装置
【課題】トルク式「φ・id+P(Ld−Lq)・id・iq」や、電機子鎖交磁束定数φとして特定の値を想定したマップに基づきトルクを推定すると、モータジェネレータ10の永久磁石の磁力が減少する異常が生じる場合等にあっては、電機子鎖交磁束定数φが変化するため、トルクの推定精度が大きく低下する。
【解決手段】MGECU30では、実効電力EP(=Vn・Ia・cosΔ)を電気角速度ωで除算することで診断用推定トルクTdeを算出する。ここで、ノルムVnは、インバータINVの出力電圧のベクトルのノルムであり、ノルムIaは、実電流id,iqのベクトルノルムであり、位相差Δは、電流ベクトルと電圧ベクトルとの位相差である。診断用推定トルクTdeがトルク指令値Trから大きく乖離するか否かに基づき、トルクの異常の有無を診断する。
(もっと読む)
回転機の制御装置
【課題】直流交流変換回路のスイッチング素子をオン・オフ操作することで回転機を流れる電流、トルク、および磁束の少なくとも1つを有した制御量を制御する新たな回転機の制御装置を提供する。
【解決手段】予測部33によって予測された予測電流ide,iqeのベクトルと、指令電流のベクトルidr,iqrとの差の内積値にオフセット値Δを加算したものである評価関数Jを最小とする操作状態(電圧ベクトル)が、インバータIVの操作状態として決定される。矩形波制御時においては、トルクフィードバック制御によって定まる位相に応じた操作状態以外の評価関数Jにおけるオフセット値Δを増大させる。
(もっと読む)
交流/直流変換器用制御装置およびその実施方法
【課題】変換器制御装置を、特に様々な種類の多相回転電気機器に適するように改善し、設置が簡単でかつ安価な、多相回転電気機器に関連する制御装置を提供する。
【解決手段】多相電気機器に関連する電流変換器の制御装置に関し、この制御装置は、マイクロコントローラ20および制御モジュール26を直列に備えている。制御モジュール26は、マイクロコントローラ20から取得する通電角度と、ステータに対するロータの角度位置を表す値とを受け取る。この制御モジュール26は、いわゆる全波動作の場合に、変換器の電力スイッチに与えるコマンドを表すデータと、制御モジュール26において計算する、特定の通電角によって決まるマスク値とを出力として供給する。次いで、これらの2つの信号を、合成して、マスク値に応じて、全波動作または減波動作用になっている制御信号を電力スイッチに供給するようになっている。
(もっと読む)
スイッチング回路
【課題】 スイッチング時間のばらつきを簡単かつ安価な回路にて抑制できるスイッチング回路を提供する。
【解決手段】
スイッチング回路は、電力用スイッチング素子S1、S2をそれぞれ有する上アームA1および下アームA2と、電力用スイッチング素子S1、S2のスイッチング動作に応じてこの電力用スイッチング素子S1、S2を有するアームA1、A2とは反対側のアームA2、A1にそれぞれ設けられた追加スイッチング素子M2、M1を動作させることで電力用スイッチング素子S1、S2の出力容量を充電する出力容量充電促進回路と、
を備える。
(もっと読む)
モータ制御装置、及び、それを利用したモータの起動方法
【課題】レシプロ式圧縮機のような負荷トルクの変動が大きい圧縮機においても、安定して差圧起動を実現するモータ制御装置及びそれを利用したモータの起動方法を提供する。
【解決手段】d軸電流指令値Id*及びq軸電流指令値Iq*、更には、周波数指令値ω*に基づいてd軸電圧指令値Vd*及びq軸電圧指令値Vq*を出力することにより電力変換回路を制御し、ベクトル制御を用いたモータ制御装置における起動方法において、d軸検出電流Idc及びq軸検出電流Iqcと、d軸電圧指令値とq軸電圧指令値とから軸誤差Δθcを検出し、位置決め運転モードにより前記d軸電流指令値及びq軸電流指令値を出力し、同期運転モードにより、軸誤差検出手段により検出した軸誤差Δθcに基づいて、負荷トルク変動に適合したd軸電流指令値及びq軸電流指令値を出力し、位置フィードバック運転モードによりd軸電流指令値及びq軸電流指令値を出力する。
(もっと読む)
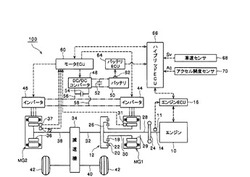
回転電機装置、車両用駆動装置、回転電機の制御方法、および車両用駆動装置の制御方法
【課題】第1回転子に生じる電磁トルクTq1と第2回転子に生じる電磁トルクTq2とが同じ向きとなる駆動状態を実現可能な回転電機装置を提供する。
【解決手段】回転電機は、固定子巻線への通電電流の電流位相を変更することで、力行及び回生に用いることのできる第1駆動状態に加えて、エンジン再始動モードに必要な第2駆動状態を実現する。第1駆動状態とは、第1回転子のトルクTq1と第2回転子のトルクTq2が互いに逆向きで、且つ、第1回転子のトルクTq1と固定子のトルクとの和が、第2回転子のトルクTq2と釣り合う駆動状態のことである。第2駆動状態とは、第1回転子のトルクTq1と第2回転子のトルクTq2が互いに同じ向きで、且つ、第1回転子のトルクTq1と第2回転子のトルクTq2との和が、固定子のトルクと釣り合う駆動状態のことである。
(もっと読む)
モータ制御装置
【課題】モータトルクの変動を緩慢にすることができ、操舵フィーリングを向上させることができるモータ制御装置を提供する。
【解決手段】速度指令値設定部21は、トルクセンサ1によって検出される操舵トルクThおよび車速センサ2によって検出される車速Vsに応じたモータトルク(アシストトルク)をモータ5から発生させるためのq軸電流指令値に対応したロータ回転速度を、速度指令値ω*として設定する。速度偏差演算部22は、速度指令値設定部21によって設定された速度指令値ω*と、速度演算部34によって演算されたロータ回転速度ωとの偏差(ω*−ω)を演算する。速度制御部23は、速度偏差演算部22によって演算された偏差(ω*−ω)に対して比例積分演算(PI演算)を行なうことによって、q軸電流指令値Iq*を演算する。
(もっと読む)
ステアリング制御装置
【課題】車両の走行安定性を向上させることが可能なステアリング制御装置の提供。
【解決手段】位相検出部18は、操舵輪側で発生する実舵角θbがステアリングホイール側で発生する操舵角θaに対して一方の回転方向へ先行して変化する進み位相状態であるか否かを判定し、実舵角θbが進み位相状態である場合、モータベクトル制御部17は、上記一方の回転方向に対して反対方向へ向かう制動トルクを発生させる指令信号をモータ3へ出力する。
(もっと読む)
制御装置
【課題】重畳するサージ電圧の大きさを抑制することである。
【解決手段】モータジェネレータ50と電力供給線を介して接続されるインバータ回路20に含まれるスイッチング素子をPWM制御方式によりスイッチング制御する制御装置70であって、スイッチング素子のスイッチング間隔が三相回転電機の巻線間に発生するサージ電圧の変動周期の1/2を中心とする所定の範囲内にあるときに、スイッチング間隔が所定の範囲外となるように所定のパラメータを変更する変更部を有する。
(もっと読む)
インバータの制御装置
【課題】モータ駆動用のインバータをパルス幅変調制御(PWM制御)によって制御する際に、インバータで生じる騒音を低減しつつ、モータの減磁を抑制する。
【解決手段】モータ駆動用のインバータをPWM制御によって制御する制御装置は、PWM制御時にインバータで生じる騒音を低減させるために、PWM制御に用いられるキャリア周波数を所定周期で任意に変動(拡散)させる拡散制御を実行する。この際、制御装置は、モータ温度の上昇に応じてキャリア周波数の拡散幅を狭める。これにより、モータ温度の上昇に応じて、モータの磁石損失の悪化が抑制される。そのため、モータM1の発熱量も低下され、モータM1の減磁が抑制される。
(もっと読む)
インバータ装置
【課題】 製造に伴う負担を減少し得るインバータ装置を提供する。
【解決手段】 インバータ装置12は、スイッチング素子31〜36と、温度検出素子41〜46と、駆動IC51〜56と、温度IC61とを備える。駆動IC51〜56は、スイッチング素子31〜36のそれぞれに設けられる。温度IC61は、スイッチング素子31に設けられ、駆動IC51〜56とは異なるデバイスとして構成される。駆動IC51〜56は、それぞれ、外部から信号を入力するための入力ポートを有している。温度ICが設けられていないスイッチング素子32〜36においては、駆動IC52〜56の入力ポートは、温度検出素子42〜46から出力される順方向電圧を入力するポートとして使用されている。温度IC61が設けられているスイッチング素子31においては、駆動IC51の入力ポートは、温度IC61から出力される通知信号を入力するポートとして使用される。
(もっと読む)
電力変換装置
【課題】同期PWM制御を有するマルチレベル電力変換装置あるいは直列多重型電力変換装置において、三角波キャリアの周波数fcの設定の自由度を増すことにより制御系の安定性を向上する。
【解決手段】交流電源電圧を直流電圧に変換し変換された直流電圧を交流電圧に変換する電力変換器を複数備え、該複数の電力変換器の交流出力を組み合わせて多レベルの交流電圧を出力する電力変換装置において、前記電力変換装置は三角波のキャリア信号と正弦波の相電圧指令を比較して前記直流電圧を交流電圧に変換する電力変換器をPWM制御するPWM変調器を備え、前記PWM変調器に入力する三角波のキャリア信号の周波数と前記相電圧指令の周波数の比は、3の奇数倍の外に、3の偶数倍、3の奇数倍および偶数倍を除く整数倍を含む。
(もっと読む)
空気調和機
【課題】電力量を正確に測定することができる空気調和機を提供すること。
【解決手段】本発明の空気調和機は、交流電源から直流電源に変換する整流回路と、モータ負荷を駆動するインバータと、チョッピング素子と昇圧用整流回路からなる昇圧回路と、交流電流の電流値を測定する電流センサと、昇圧回路のチョッピング素子の半周期に対するチョッピング回数をカウントするチョッピング回数検出手段と、電流センサで検出する電流値とチョッピング回数から力率を選択し出力する回数別力率テーブル記憶手段とを備え、回数別力率テーブル記憶手段から出力される力率を用いて電力量を算出する。
(もっと読む)
電力変換装置
【課題】入力された電力をスイッチングして所定の電力に変換する電力変換装置において、スイッチング素子がオン電圧降下の個体差を有していても、オン電圧補償を精度よく行えるようにする。
【解決手段】交流電力又は直流電力をスイッチング素子(Su,Sv,Sw,Sx,Sy,Sz)のスイッチングで所定の電力に変換して出力する電力変換部(4)を設ける。スイッチング素子(Su,Sv,Sw,Sx,Sy,Sz)の実装状態におけるオン抵抗(Ron)の個体差、又はグループ単位の偏差に基づいて、電力変換部(4)の出力電圧(vu,vv,vw)を制御する制御部(5)を設ける。
(もっと読む)
モーター駆動制御装置、圧縮機、送風機、空気調和機及び冷蔵庫又は冷凍庫
【課題】コストアップや回路の大型化を伴わずに高調波電流を低減するモーター駆動制御装置及びそれを用いた圧縮機、送風機、空気調和機及び冷蔵庫又は冷凍庫を提供する。
【解決手段】三相整流器2と、昇圧コンバーター部3と、スイッチング制御手段10と、昇圧コンバーター部3の出力を平滑する平滑コンデンサー7と、昇圧コンバーター部3の出力を交流電圧に変換してモーター15に供給するインバーター回路12と、インバーター回路12を駆動するインバーター駆動手段14と、母線電流を検出する母線電流検出部8と、昇圧コンバーター部3の出力電圧を検出する出力電圧検出部9と母線電流検出部8の出力に基づいて三相交流電源の不平衡を検出する不平衡成分検出部とを備え、スイッチング制御手段10は、スイッチング素子5のオンデューティーを決定し、三相交流電源からの入力電流が平衡となるよう制御を行う。
(もっと読む)
モーター駆動制御装置、圧縮機、送風機、空気調和機及び冷蔵庫又は冷凍庫
【課題】コストアップや回路の大型化を伴わずに高調波電流を低減するモーター駆動制御装置、及びそれを用いた圧縮機、送風機、空気調和機及び冷蔵庫又は冷凍庫を提供する。
【解決手段】三相整流器2と、昇圧コンバーター部3と、昇圧コンバーター部3のスイッチング素子5を制御するスイッチング制御手段10と、昇圧コンバーター部3の出力を平滑する平滑コンデンサー7と、昇圧コンバーター部3の出力である直流電圧を交流電圧に変換し、モーターに供給するインバーター回路12と、インバーター回路12を駆動するインバーター駆動手段14と、母線電流を検出する母線電流検出部8と、三相交流電源の不平衡を検出する不平衡成分検出部とを備え、スイッチング制御手段10は、スイッチング素子5のオンデューティーを決定し、三相交流電源からの入力電流が平衡となるよう制御を行う。
(もっと読む)
モータ制御装置
【課題】モータ制御が停止している期間においても、モータ回転角度に対して信頼性を確保しながら、モータ回転角度の演算を低消費電流で継続する。
【解決手段】主演算手段101は、ブラシレスモータ5を制御する第1の動作状態と、モータ制御を停止する第2の動作状態をとる。副演算手段102は、第1の状態において、第1監視手段106で主演算手段101を監視し、第2の状態においてモータ回転角度の演算をする。これにより、モータ制御停止時においてもモータ回転角度の演算が継続できる。また、副演算手段102は、第2監視手段201で監視し、信頼性を確保する。さらに、第2の動作状態において、第1の動作状態の第1演算周期より長い第2演算周期にてモータ回転角度の演算を行うことで、消費電流が低減可能となる。
(もっと読む)
モータ制御回路
【課題】パワーモジュールをオーバースペックとならないように使用できるモータ制御回路を提供する。
【解決手段】モータ制御回路1は、モータ10と、モータを駆動するパワーモジュール11と、パワーモジュール11に流れる電流を検出し、それを電圧値に変換して出力する電流検出部14と、パワーモジュール11を制御する制御部13を備える。電流検出部14から出力された電圧値が一定以上となった場合、パワーモジュール11に内蔵された保護用IC12が働き、パワーモジュール11は動作を停止する。電流検出部14は、パワーモジュール11に流れる実際の電流よりも小さな電流に相当する電圧値を出力する補正機能を備える。
(もっと読む)
61 - 80 / 766
[ Back to top ]