
Fターム[5H505HA03]の内容
交流電動機の制御一般 (51,584) | 駆動制御回路又は電力変換回路の主要な構成素子 (2,963) | リアクトル (99)
Fターム[5H505HA03]に分類される特許
1 - 20 / 99
電力変換装置
プレス機械の電源装置
産業用ロボットの可動部の回転軸に接続されたサーボモータを駆動するサーボモータ駆動装置
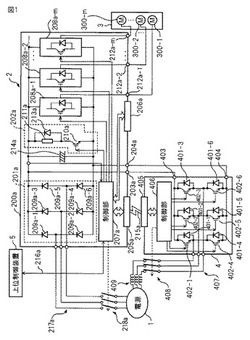
【課題】電源回生機能を産業用ロボットの操作条件に応じて追加することができるサーボモータ駆動装置を提供する。
【解決手段】サーボモータ駆動装置2は、ダイオード209a−1,209a−2,209a−3,209a−4,209a−5,209a−6を有するコンバータ201aと、産業用ロボット3の可動部の回転軸に接続されたサーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーを、NPN型トランジスタ210aがオン状態であるときに消費する回生抵抗211aを有する回生抵抗回路202aと、回生エネルギーを三相交流電源1側に回生するコンバータ4を着脱自在に接続するコネクタ203a,204a及び多ピンコネクタ205aと、を有する。
(もっと読む)
交流電動機の制御装置

【課題】パルス幅過変調制御方式を使用するときのキャリア周波数に起因する雑音の官能上の感度を低減する。
【解決手段】ECU3は、モータの回転に伴って発生する雑音の周波数成分であり、且つ、その周波数がモータの回転数整数倍である高調波の周波数成分のうち、振幅が最大である高調波の周波数を求める周波数算出部35と、パルス幅過変調制御方式による制御を実施するときのキャリア周波数を、周波数算出部35によって求められた高調波の周波数に設定する周波数設定部36と、を備える。
(もっと読む)
自動車
【課題】モータに過電圧が作用したり過電流が流れたりするのを抑制する。
【解決手段】駆動輪の回転数の減少時に、モータを駆動するインバータの制御方式を矩形波制御方式から過変調制御方式に切り替える矩形波過変調切替条件が成立したときにおいて(S530,S540)、駆動輪の回転数減少率ΔNwが所定値Nref以下のときには過変調制御方式に切り替え(S600)、駆動輪の回転数減少率ΔNwが所定値Nrefより大きいときには過変調制御方式を経由せずに正弦波制御方式に直接切り替える(S610)。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、正弦波PWM制御方式または過変調制御方式または矩形波制御方式でインバータを制御する制御部18とを含む。制御部18は、正弦波PWM制御方式の実行時に、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、インバータ16の入力電圧VHを低下させ、インバータ16の制御方式を正弦波PWM制御方式から過変調制御方式または矩形波制御方式に切り替える電圧低下制御部30を有する。
(もっと読む)
排熱回収装置
【課題】タービンで発電した電力でコンプレッサを駆動して排熱回収することができ、コンプレッサの制御が容易であり、かつ排熱を回収するために複数のタービンを必要とする場合への適用が容易である排熱回収装置を提供する。
【解決手段】直流バス5の直流電圧を検出する電圧検出器12と、直流電圧に基づいて算出されたコンプレッサ8A,8Bの回転速度指令値16A,16Bをインバータ6A,6Bに出力する回転速度指令器13とを備える。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、予め設定されたPWM条件下で電流フィードバックを用いるPWM制御方式でインバータ16を制御する制御部18とを含む。制御部18は、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、PWM制御で電流フィードバックを行う場合のフィードバックゲインを、通常時に使用する通常時ゲインよりも低下させるゲイン低下部であるゲイン決定部30を有する。
(もっと読む)
空気調和機
【課題】力率改善回路の異常に起因しない過電圧が発生しても、室外ユニットは室内ユニットに異常信号を送信せず、力率改善回路異常の表示を行わない空気調和機を提供すること。
【解決手段】電圧検出手段により検出された前記直流電圧に基づいて前記力率改善用半導体スイッチを制御する制御手段を備える電源装置を有する室外ユニットと、前記電源装置に供給する交流電圧をオン/オフするメイン電源スイッチを有する室内ユニットとを備え、前記電源装置の制御手段は、前記電圧検出手段により検出された前記直流電圧が上限電圧以上になると、前記力率改善用半導体スイッチをオフし、前記室内ユニットに前記メイン電源スイッチをオフするように制御信号を出力するが、圧縮機停止中においては、前記電圧検出手段により検出された前記直流電圧が上限電圧以上となっても前記制御信号を出力させない。
(もっと読む)
モータ制御装置
【課題】モータに矩形波電圧を印加するモータ制御装置において、過電流の発生を抑制する。
【解決手段】モータに印加する電圧の位相を変化させてトルクを調整するとともに、モータに印加する電圧波形を矩形波形とPWM波形の間で切り替えてモータを制御するモータ制御装置であって、モータの回転数に応じて電圧位相の下限値を規定する下限値曲線a,c,eを含むマップを備え、モータの回転数Nに応じた電圧位相φvが所定の下限値曲線a,c,e以下となった場合に、モータに印加する電圧波形を矩形波形からPWM波形に切り替える。
(もっと読む)
モータ制御システム
【課題】矩形波制御実行中にコンバータによる昇圧動作の開始を適時に行ってシステム損失の増加を抑制することができるモータ制御システムを提供する。
【解決手段】モータ制御システムは、電源、コンバータ、インバータおよび交流モータと、コンバータおよびインバータの作動を制御することにより、正弦波PWM制御、過変調制御および矩形波制御のいずれかの制御方式でモータを駆動させる制御部とを備える。制御部は、電源から供給される直流電圧をコンバータで昇圧せずにインバータに供給し、モータについて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御が実行されるように制御する。この場合において、制御部は、電流ベクトルが昇圧開始前後でシステム損失が等しくなるモータトルクT2に相当する電流位相になったときにコンバータによる昇圧動作を開始させる。
(もっと読む)
モータ制御システム
【課題】1つのコンバータの出力電圧で複数のモータを駆動するモータ制御システムにおいて、各モータに対応して行われるフィードバック制御同士の干渉を防止してシステム電圧の可変制御を安定して滑らかに行えるようにする。
【解決手段】モータ制御システムは、コンバータと、2つのインバータと、2つの交流モータと、制御部とを備える。制御部は、少なくとも一方のモータついて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御されるようにシステム電圧を電流位相のフィードバック制御により可変するにあたり、電流ベクトルからそれぞれ求めたシステム電圧偏差が大きい方のモータをフィードバック制御の対象として選択する(S20〜S28)。
(もっと読む)
交流電動機の駆動装置およびそれを搭載する車両、ならびに交流電動機の制御方法
【課題】変調PWM制御および正弦波PWM制御を切換えて制御する交流電動機の駆動装置において、交流電動機の回転速度が急変した場合の緊急切換動作時におけるトルク急減を抑制する。
【解決手段】車両100は、ECU300によってPWM制御を用いてインバータ130が制御されてモータジェネレータ140を駆動することによって走行する。ECU300は、正弦波PWM制御および過変調PWM制御を含む複数の制御モードを切換えてインバータ140を制御する。ECU300は、過変調PWM制御を実行中に、駆動輪160がスリップ状態からグリップ状態に変化することに伴って電流が急増した場合に、過変調PWM制御から正弦波PWM制御に強制的に切換えるとともに、正弦波PWM制御における変調率の上限値を緩和して、正弦波PWM制御において通常時よりも大きなトルクが出力できるようにする。
(もっと読む)
電力変換装置の制御装置
【課題】 インバータを利用したモータ駆動システムにおいて、同期PWMモードでのインバータの運転時に、トルク不足の問題を発生させることなく、モータの損失の増加を回避し、効率低下を抑える。
【解決手段】 インバータ制御部110は、インバータ40のスイッチング素子のON/OFF切替を行うためのゲート信号の生成モードとして、非同期PWMモードと同期PWMモードとを有する。直流電圧指令値演算部143は、インバータ制御部110が同期PWMモードでゲート信号を生成している場合に、インバータ40からモータ50に供給される電流のうちd軸電流が0または負になるように、DC−DCコンバータ20からインバータ40に供給する直流電圧を指示する指令値を演算する。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、実変調度となまし変調度との間に乖離が生じても、PWM制御モードと過変調制御モードとの間の制御モード切替に際し、過大な電流が生じることを抑制することである。
【解決手段】回転電機制御システム10は、回転電機20と、回転電機20を駆動する電源回路ブロック12と、電流フィードバックの制御ブロック22と、制御装置40で構成される。制御装置40は、実変調度と、なまし変調度とを求める変調度取得部42と、実変調度となまし変調度の間について予め定めた所定条件に基づいて、PWM制御モードと過変調制御モードとの間で制御モードを切り替える制御モード切替部44を含んで構成される。
(もっと読む)
射出成形機
【課題】循環電流を抑えつつ、整流時に発生する高調波を抑制できる、射出成形機を提供すること。
【解決手段】モータと、前記モータを駆動する駆動回路と、前記駆動回路に電力を供給する整流器102と、前記駆動回路と整流器102との間の直流電力を交流電力に変換して出力するブリッジ回路104とを備える射出成形機であって、交流電源電圧が一次側に入力される変圧器67と、ブリッジ回路104によって変換された交流電力の電流波形が正弦波になるようにブリッジ回路104の動作を制御するコントローラ26とを有し、変圧器67の第一の二次巻線の接続先が整流器102の入力側であり、変圧器67の第二の二次巻線の接続先がブリッジ回路104の出力側であることを特徴とする、射出成形機。
(もっと読む)
射出成形機
【課題】モータの回生電力を効率的に回生できる、射出成形機を提供すること。
【解決手段】モータと、前記モータを駆動する駆動回路と、前記駆動回路に電力を供給する整流器102とを備える射出成形機であって、前記モータの回生電力の回生経路82が整流器102に並列接続され、前記駆動回路と整流器102との間の直流電力を交流電力に変換するブリッジ回路104と、ブリッジ回路104によって変換された交流電力が入力される高調波成分抑制部63とを回生経路82に備えるとともに、ブリッジ回路104によって変換された交流電力の電流波形が正弦波になるようにブリッジ回路104の動作を制御するコントローラ26を備えることを特徴とする、射出成形機。
(もっと読む)
電動車両および電動車両の制御方法
【課題】昇圧コンバータにおける共振の発生を回避しつつ車両挙動の急激な変動を抑制する電動車両およびその制御方法を提供する。
【解決手段】制御装置40は、PWM制御モードと矩形波電圧制御モードとを選択的に切替えてインバータ20を制御する。制御装置40は、モータジェネレータMGの回転数が所定範囲内となることによって平滑コンデンサCおよび昇圧コンバータ10のリアクトルLにより形成されるLC回路の共振条件が成立したとき、モータジェネレータMGのトルクを制限することによって矩形波電圧制御モードでのインバータ20の制御を禁止する。さらに、制御装置40は、上記共振条件の成立に伴なうトルクの制限およびその解除時にトルクの変化率を制限する。
(もっと読む)
交流電動機の制御装置および制御方法
【課題】高トルク領域における制御応答性を適切に高めることが可能な交流電動機制御を実現する。
【解決手段】インバータ14は、矩形波電圧制御モードでは、制御装置30からの制御信号S3〜S8に応答して、電力線7上の直流電圧を、矩形波電圧に変換して交流電動機M1へ印加する。制御装置30は、交流電動機M1の出力トルクがトルク指令値Tqcomと一致するように、矩形波電圧の位相を制御する。制御装置30は、交流電動機のトルクが高トルク領域にある場合には、フィードバック制御に加えてフィードフォワード制御を実行する。フィードフォワード制御に用いられるフィードフォワードゲインは、交流電動機M1の状態に応じて可変に設定される。
(もっと読む)
交流電動機の制御装置および制御方法
【課題】全体的な制御安定性を確保した上で、高トルク領域における制御応答性を高めることが可能な交流電動機制御を実現する。
【解決手段】インバータ14は、矩形波電圧制御モードでは、制御装置30からの制御信号S3〜S8に応答して、電力線7上の直流電圧を、矩形波電圧に変換して交流電動機M1へ印加する。制御装置30は、交流電動機M1の出力トルクがトルク指令値Tqcomと一致するように、矩形波電圧の位相を制御する。制御装置30は、交流電動機のトルクが高トルク領域にある場合には、トルクが非高トルク領域にある場合と比較して、トルクの制御応答性を高めるように、矩形波電圧の位相を制御する。
(もっと読む)
1 - 20 / 99
[ Back to top ]