
Fターム[5H505HA07]の内容
交流電動機の制御一般 (51,584) | 駆動制御回路又は電力変換回路の主要な構成素子 (2,963) | 半導体素子 (2,325)
Fターム[5H505HA07]の下位に属するFターム
Fターム[5H505HA07]に分類される特許
41 - 60 / 166
モータ制御装置
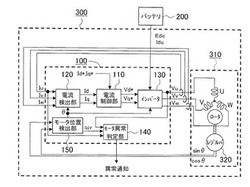
【課題】ゼロ速度から高速度回転までのモータ運転中において、モータの層間短落および位置センサ部の誤差増大等の中間レベルのモータ異常を検知できるモータ制御装置を得ること。
【解決手段】モータ制御装置100は、モータ310に出力される出力電流の電流値を検知して目標トルクに応じた電流値に制御するモータ制御装置100であって、モータ310の運転中にモータ310に出力される出力電流の電流値と出力電圧の電圧値に基づいてモータ運転状態値を演算し、その演算されたモータ運転状態値に基づいてモータ310に異常が発生しているか否かを判定するモータ異常判定部140を有する。
(もっと読む)
モータ制御装置及びモータ制御方法

【課題】インバータの効率の悪化を防ぎつつ、インバータを安定させて制御することができる、モータ制御装置を提供する。
【解決手段】直流電源から入力される直流電力を交流電力に変換し、モータ8に供給するインバータ6と、電圧検出手段の検出電圧、外部から入力されるトルク指令値及びモータ回転数検出手段の検出回転数と、電流指令値に基づき、インバータ6に含まれるスイッチング素子の制御信号を生成し、インバータ6を制御するインバータ制御手段と、インバータ6の制御状態を検出する状態検出手段と、状態検出手段により検出された制御状態に応じて、検出電圧又は検出回転数を所定のオフセット量でオフセットするオフセット手段とを備え、指令値算出手段は、オフセット手段によりオフセットされた検出電圧又は検出回転数を入力として電流指令値を算出し、電流指令値に含まれるd軸電流指令値を負側に増加させる。
(もっと読む)
電動パワーステアリング装置
【課題】通電不良発生後の継続制御時における操舵フィーリングの向上を図ることのできる電動パワーステアリング装置を提供すること。
【解決手段】制御信号出力部は、二系統の独立したモータコイルに対応して設けられた各駆動回路に対して二系統の独立した制御信号を出力する。また、電力供給の基礎指令Iq*に基づき優先指令Iq*_x及び補完指令Iq*_yを演算することにより、一方の系統について通電不良の発生が検知された場合には、他方の系統に優先指令Iq*_xを振り分けることにより、当該他方の系統に対する制御信号出力を優先する。そして、通電不良の発生相が一相のみであり、且つ基礎指令Iq*の値が優先指令Iq*_xの上限値(Iq_max/2)を超える場合には、通電不良が発生した系統の駆動回路に対し、通電不良発生相以外の二相を通電相として、その上限値の超過分に相当する補完指令Iq*_yを基礎とした電力供給を実行すべく制御信号を出力する。
(もっと読む)
人間の健康を増進し景気を振興させる蓄電池。
【課題】推進動力として使用されるディーゼルエンジンによる大気汚染を防止する駆動装置を提供する。
【解決手段】デイーゼルエンジンの排気微粒子を削減する為、蓄電池をVVVFインバータで、三相交流に変換し、非常に効率が高く、安価で高性能なSRモーターに接続して移動動力を得る事により、大気汚染を削減する。動力源である蓄電池の充電には、漁港内に設置した夜間の低額充電設備を利用して、利用者の安全と利便をはかる。
(もっと読む)
モータ制御システム
【課題】モータ制御システムにおいて、矩形波制御方式からPWM制御方式への切替えを適時に行ってモータ過電流の発生を抑制する。
【解決手段】モータ制御システムは、交流モータ14の運転条件に応じてインバータ38の制御方式を矩形波制御、過変調PWM制御、正弦波PWM制御の間で選択的に設定する制御装置100を備える。制御装置100は、モータ電流の電流位相をdq平面上における閾値ラインと比較して矩形波制御方式からPWM制御方式への切り替えを行う制御方式切替部と、矩形波制御方式の実行中に、矩形波制御部におけるトルク偏差ΔTrの比例積分制御で用いられる積分項GiΔTrの値が所定値ΔTr_thrを超えたときにdq平面上における閾値ラインを進角側または低q軸電流側に変更する閾値変更部S24とを含む。
(もっと読む)
インバーター制御装置
【課題】各相の電流値を検出する周期を短くするとともに、負荷側の駆動に影響を与えてしまうことを抑制する補正をして、負荷側を高効率に駆動する制御を実現したインバーター制御装置を提供することを目的としている。
【解決手段】指令補正部11は、指令信号の大きさの順番に並べた相間の電圧差が所定値より小さいとき、1/2PWM周期ごとに、該電圧差が所定値より小さい2つの補正前指令信号の内少なくとも一方と、他方との電圧差が、所定値以上になるようにオフセット補正を行うとともに、オフセット補正のオフセット方向を、オフセット補正前の指令信号を基準としたオフセット補正後の指令信号の積分値のうちオフセット補正より前まで積算した値が、0に近づくように演算して決定する。
(もっと読む)
モータ駆動装置
【課題】直流母線から検出した電流に基づき、負荷トルクに応じてインバータの出力電圧を調整可能としたモータ駆動装置を提供する。
【解決手段】直流電力を交流電力に変換するインバータにより、回転子位置を検出する手段を持たない永久磁石同期電動機を駆動するモータ駆動装置であって、インバータの出力電圧の大きさとその周波数との比をほぼ一定に制御するモータ駆動装置において、インバータ32の直流母線30に流れる電流の平均値を検出するローパスフィルタ16と、このフィルタ16により検出した電流の平均値から、d−q座標系における電流のq軸成分であるトルク電流を検出するトルク電流検出手段17と、検出したトルク電流をトルク電流指令値に一致させるようにインバータ32の出力電圧の大きさを調整するための減算器18,20及びPI調節手段19と、を備える。
(もっと読む)
永久磁石同期電動機の駆動装置
【課題】永久磁石同期電動機が脱調により停止した時点で脱調を確実に検出する機能を備えた永久磁石同期電動機の駆動装置を提供する。
【解決手段】永久磁石同期電動機30をインバータ20により駆動するための駆動装置であって、インバータ20の直流電流に基づいて電動機30の脱調を検出するようにした永久磁石同期電動機の駆動装置において、インバータ20の直流電流の振動成分を抽出するフィルタ51と、このフィルタ51により抽出した振動成分の振幅を演算する振動成分振幅演算器54と、この演算器54により演算した振幅が所定の基準値よりも小さくなったときに電動機30が脱調状態にあることを検出する脱調検出手段52Aと、を備える。
(もっと読む)
モータ駆動制御装置
【課題】鎖交磁束の波形に含まれる高調波成分の影響を除去してトルクリプルを抑制できるモータ駆動制御装置を提供する。
【解決手段】モータ駆動制御装置において、回転子の角度検出値に基づいて変化するd軸交流信号をコイルに流すd軸電流の目標値であるd軸電流目標値に加算し、前記角度検出値に基づいて変化しd軸交流信号に対して1/4周期の位相差をもつq軸交流信号をコイルに流すq軸電流の目標値であるq軸電流目標値に加算する加算手段を有する。そして、d軸交流信号が加算されたd軸電流目標値に追従するようにd軸電流を制御し、q軸交流信号が加算されたq軸電流目標値に追従するようにq軸電流を制御する。
(もっと読む)
電動機駆動トルク制御装置及び電動機駆動トルク制御方法
【課題】回転体による所要の処理が可能であるか否かを確実に判定することができる電動機駆動トルク制御装置又は電動機駆動トルク制御方法を提供する。
【解決手段】トルク検出部41は、インバータ40がモータ20へ出力する出力電流によりモータ20のトルクを検出する。トルク値算出部73は、トルク検出部41で検出した駆動トルクを収集して統計値を算出する。統計値は、例えば、検出したピーク値の平均値あるいは最大値などとすることができる。判定部72は、トルク値算出部73算出した駆動トルクの統計値が許容トルク範囲内であるか否かに応じて粉砕の可否を判定する。
(もっと読む)
回転機の制御装置
【課題】モータジェネレータ10の制御量の制御のための電流の振幅が大きくなる状況下、高周波電圧vdhの重畳に伴ってモータジェネレータ10に実際に流れる高周波電流idh,iqhの振動方向に基づき電気角θを推定すると、ノイズが大きくなること。
【解決手段】高周波電圧発生部52の発生する高周波電圧vdhと、モータジェネレータ10を実際に流れる高周波電流idh,iqhとの外積値opは、電気角θの誤差信号として角度推定部56に入力される。角度推定部56では、外積値opをゼロにフィードバック制御すべく電気角θを操作する。高周波電圧発生部52では、要求トルクTrが大きくなるほど高周波電圧vdhの振幅vhを小さくする。
(もっと読む)
交流回転機の制御装置
【課題】制御位相を切換える前に負荷が変動しても、切換え中の制御電流ベクトル指令や制御位相が不連続にならず、交流回転機をスムーズに駆動することができる交流回転機の制御装置を得る。
【解決手段】交流回転機1の回転子位置の推定値である推定位相と、交流回転機1の回転速度の推定値である推定速度とを出力する推定手段4と、任意の制御位相上での制御電流ベクトル指令を生成し、回転機電流を制御位相上へ変換した制御電流ベクトルが制御電流ベクトル指令に一致するように電圧指令値を出力する制御手段5とを備え、制御手段5は、外部より入力する速度指令と推定速度とが一致するようして得た実電流指令ベクトルと、制御位相と、推定位相と、予め設定された電流ベクトル設定値とに基づいて制御電流ベクトル指令を生成するとともに、任意に設定した同期位相と推定位相とを相互に切換えて制御位相とする。
(もっと読む)
交流電動機の制御装置及び制御方法
【課題】演算負荷が小さく、かつ推定精度が高い電流推定を実現する交流電動機の制御装置を提供すること
【解決手段】所定の第一期間と第二期間の間、直線母線電流を一定間隔でそれぞれの期間において複数回検出し、各期間における検出値の積分値を要素とするベクトルに、検出が行われた瞬間のインバータの出力電圧位相の正弦関数と余弦関数の各期間における積分値を要素とする行列の逆行列を乗じることにより、無効電流及び有効電流を推定する。
本発明の望ましい実施態様によれば、交流電動機に流れる無効電流及び有効電流を、小さい演算負荷で高精度に推定することができる。
(もっと読む)
永久磁石型三相交流電動機の制御装置
【課題】出力トルクが間欠的に変化する永久磁石型三相電動機を駆動するインバータに搭載されているパワー半導体スイッチの温度変化幅を小さくしてサーマルサイクルによる熱劣化を防止する。
【解決手段】永久磁石型三相電動機を駆動するインバータに与えられるトルク指令が小さくトルク分電流であるq軸電流が小さい場合には、磁束分電流でありマイナスの値を有するd軸電流を増加させ、またトルク指令が大きくトルク分電流であるq軸電流が大きい場合には磁束分電流でありマイナスの値を有するd軸電流を減少させるd軸電流指令演算器を具備し、パワー半導体スイッチに流れる電流となるq軸電流とd軸電流のベクトル和が一定の所定値となるようにしてパワー半導体スイッチで生じる導通損失を一定とすることでパワー半導体スイッチの温度を一定に保つ。
(もっと読む)
駆動制御装置
【課題】インバータの温度上昇を抑制することが可能な駆動制御装置を提供する。
【解決手段】モータ・ジェネレータ2と、モータ・ジェネレータ2に供給する電力を制御するインバータ22と、モータ・ジェネレータ2のロータ軸3に連結されたトルクコンバータ5とを備えた車両の駆動装置1に適用される駆動制御装置において、トルクコンバータ5にはロックアップクラッチ12が設けられ、ロックアップクラッチ12の係合部材13が係合位置にあり、かつインバータ22の温度が所定の判定温度以上になると推定した場合には、係合部材13を解放位置に移動させてロックアップクラッチ12を解放する。
(もっと読む)
誘導電動機の制御装置及び制御方法
【課題】振動の原因となっている推定磁束の直流成分を除去し、モータの振動を低減する制御方式を実現した誘導電動機の制御装置又は制御方法を提供する。
【解決手段】誘導電動機の制御装置10は、誘導電動機106に供給される電流を、静止座標上のα相電流及びβ相電流に変換する3相/2相座標変換器108と、回転座標上のd軸成分の磁束電圧指令及びq軸成分のトルク電圧指令を、静止座標上のα相電圧指令及びβ相電圧指令に変換するdq/2相座標変換器120と、α相電流及びβ相電流と、α相電圧指令及びβ相電圧指令とを入力してα相磁束推定値及びβ相磁束推定値を算出する磁束推定器11と、α相磁束推定値及びβ相磁束推定値からオフセットを取り除くオフセット除去処理部12と、オフセット除去処理部12からのα相磁束推定値及びβ相磁束推定値を入力して誘導電動機106の速度を推定する速度推定器112と、を備える。
(もっと読む)
モータ制御装置及びモータ駆動システム
【課題】dq座標系と異なる座標系を推定するシステムにおいて位置推定誤差を抑制する。
【解決手段】モータの電機子巻線の鎖交磁束のδ軸成分であるδ磁磁束Φeamδを対象物理量として推定し、δ磁磁束をゼロに向かわせることで、制御軸であるγ及びδ軸をd及びq軸と異なるdm及びqm軸に追従させる。モータへの印加電圧のγ軸成分(vγ*)、γ軸電流による電機子巻線での電圧降下(Raiγ)及び回転子の回転(ωe)によって発生するδ軸方向の磁束(vγ*−Raiγ/ωe)と、δ軸電流によって発生する磁束のδ軸成分(Lqmiδ)との和を、演算部31にて求める。一方で、γ軸電流によって発生する磁束のδ軸成分(Ldmiγ)を乗算部32にて求め、演算部31の出力値と乗算部32の出力値を加算することでδ軸磁束Φeamδを導出する。
(もっと読む)
同期電動機の制御装置
【課題】動作回転数範囲に共振周波数があっても安定して動作することが可能な同期電動機の制御装置を得る。
【解決手段】同期電動機10の巻線に流れる少なくとも2相の電流の検出値と周波数指令の積算によって得られる位相とから求めた周波数補正量を入力として、軸共振周波数とその前後の周波数成分のみを減衰させるノッチフィルタ12を介して、新たな周波数補正量を算出するようにした。
(もっと読む)
エネルギー消費回路、出力装置及び出力システム
【課題】インバータ13を経由して供給されたモータ14の回生エネルギーの回収動作をする回収回路の小型化と長寿命化。
【解決手段】インバータ13を経由して供給されたモータ14の回生エネルギーの回収動作が可能な2つの回収回路1,2を並列に有するエネルギー消費回路15と、回生エネルギーの伝達経路51,52を介してインバータ13に供給すべき直流電圧VB2を出力する直流電圧出力回路40とを備え、回収回路1,2のそれぞれがインバータ14に並列に接続され、回収回路1,2のうち前記回収動作をする回路の数が、回生エネルギーの大きさに応じて変化する、出力システム。
(もっと読む)
モータ制御装置
【課題】直流電圧を検出してからその検出結果に応じた電圧がモータに印加されるまでに時間遅れが生じた場合でも、それを補償する。
【解決手段】直流電圧Vdcを検出する毎にその電圧Vdcの値とゼロクロス点からの経過時間とを対応付けて記録する。該経過時間が同じ時点の過去の直流電圧Vdcから推定した直流電圧と電圧指令値を用いて制御回路7でPWM信号のデューティを算出しインバータ3に供給する。制御回路7は、PWM信号のキャリア周期のセンタ時刻の値に対応する過去の直流電圧Vdcの値を線形補間することにより次のキャリア周期の直流電圧Vdcの第1推定値を求め、第1推定値と電圧指令値に基づいて仮デューティを算出し、線形補間した直流電圧を仮デューティに基づいて定めた区間で積分し、該積分結果を平均して第2推定値を求め、第2推定値と電圧指令値に基づいてデューティを決定し、該決定したデューティに基づいて前記PWM信号を生成する。
(もっと読む)
41 - 60 / 166
[ Back to top ]