
Fターム[5H505JJ22]の内容
交流電動機の制御一般 (51,584) | 演算部の構成手段 (5,723) | 演算回路要素 (3,208) | 積分回路 (220)
Fターム[5H505JJ22]に分類される特許
1 - 20 / 220
電力変換装置
電力変換装置
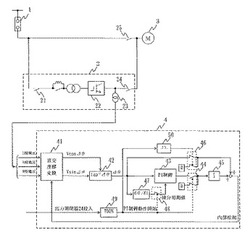
【課題】PLL回路の位相誤差を素早く補正する電力変換装置を提供する。
【解決手段】交流電動機3を駆動するインバータ装置2と、これを直接駆動するバイパス開閉器25と、PLL制御手段4とで構成する。PLL制御手段4は、電圧検出器23の検出電圧とインバータ装置2の内部位相との位相差を検出する位相差検出手段と、この位相差をPI制御器43によって比例積分制御し、切り替え器44を介して補正前内部位相とするPI制御手段と、位相差を切り替え器46を介して出力し、これを補正前内部位相に加えて内部位相とする位相補正手段と、位相差を微分し、開閉器48を介してPI制御器43の積分初期値とする積分初期値設定手段とを有する。出力開閉器24が投入されて所定時間経過後、切り替え器44の入力を0からPI制御器43の出力に切り替え、切り替え器46の入力を短期間0から位相差に切り替えた後再び0に戻し、且つ開閉器48を閉路する。
(もっと読む)
車両駆動用誘導電動機の制御装置

【課題】トルク推定の精度を向上させることができる、車両駆動用誘導電動機の制御装置。
【解決手段】上位コントローラ110から入力されるトルク指令Tmrefおよび二次磁束指令φ2refに基づいて、車両駆動用誘導電動機108を高周波駆動するインバータ107に制御信号を出力するモータコントローラ109は、インバータ107の駆動周波数ω1を設定する一次周波数演算部219と、誘導電動機108の三相電流値を検出するモータ電流値検出部209と、検出された三相電流値をd軸電流値Idおよびq軸電流値Iqに変換する座標変換部223と、誘導電動機108の出力トルクを推定するトルク推定部211と、を備え、トルク推定部211は、モータ電流値検出部209による電流検出からトルク推定までの電流位相変化を補正する位相補償量と、d軸電流値およびq軸電流値とに基づいて、出力トルクTmを推定する。
(もっと読む)
永久磁石同期電動機駆動システムのパラメータ推定装置
【課題】本発明は、永久磁石同期電動機駆動システムのパラメータ推定装置を提供する。
【解決手段】本発明の推定装置は、リアルタイム磁束推定を介してインダクタンスと永久磁石による鎖交磁束を推定して、永久磁石同期電動機の運転性能を向上する。
(もっと読む)
モータ制御装置
【課題】加速・減速や負荷トルク変動を含む広い動作領域で、磁束指令に対する磁束の追従遅れを補正し、所定のトルクを出力させ、加速性能および制御性能の向上が図れるモータ制御装置を得ること。
【解決手段】外部から入力される磁束指令Φcomと磁束推定部8が推定した推定磁束ΦSとの偏差が小さくなるようにする励磁電流指令を生成する磁束制御器13を備え、誘導モータ1をベクトル制御により駆動制御するモータ制御装置において、磁束指令Φcomに基づいて磁束遅れ補正指令Φhcomを生成する磁束遅れ補償器16aを設け、磁束遅れ補正指令Φhcomは、減算器20において磁束指令Φcomに代えて磁束推定部8が推定した推定磁束ΦSとの偏差を取るのに用いる。
(もっと読む)
永久磁石形同期電動機の制御装置
【課題】過渡状態においても磁極位置検出回路を用いずに磁極位置と速度を正確に演算する。
【解決手段】回転子に同期した直交回転座標軸γδ軸を定義し、高周波電圧を前記γ軸基本波電圧指令値に加算してγ軸電圧指令値を印加する。検出した電動機電流δ軸成分から前記高周波電圧と同じ周波数の余弦波成分のフーリエ級数を演算し、位置推定誤差を演算する。
(もっと読む)
電力変換装置
【課題】交流一周期に出力するPWMパルス数の減少による、基本波成分における電圧出力誤差拡大の影響を回避する。
【解決手段】べクトル切り替え位相角およびゼロ電圧ベクトル出力角度幅を、ベクトル切り替え位相角を電圧位相角とする第一の複素ベクトルと、ゼロ電圧ベクトル出力角に応じた位相角に2/3πの位相遅れおよび位相進み処理を行った第二、第三の複素ベクトルの三種類のベクトルの合成ベクトルが、虚数成分が0、且つ、実数成分が前記電圧指令値の振幅に比例した値となるよう決定する。
(もっと読む)
永久磁石形同期電動機の制御装置
【課題】過渡状態においても磁極位置検出回路を用いずに磁極位置と速度を正確に演算する。
【解決手段】回転子に同期した直交回転座標軸γδ軸を定義し、高周波電圧を前記γ軸基本波電圧指令値に加算してγ軸電圧指令値を印加する。検出した電動機電流δ軸成分微分値から前記高周波電圧と同じ周波数のフーリエ級数を演算し、位置推定誤差を演算する。
(もっと読む)
回転機の制御装置
【課題】電流センサの出力値に実際の電流の振幅に対して所定の比率(≠1)だけ相違する誤差であるいわゆるゲイン誤差が含まれる場合、これに起因してモデル予測制御の制御性が低下するおそれがあること。
【解決手段】偏差算出部40,44では、予測電流ide,iqeのそれぞれと同位相の実電流id,iqとの差が算出される。フィードバック制御部42,46のそれぞれでは、偏差算出部40,44の出力値をゼロにフィードバック制御するための操作量(補償量idcomp,iqcomp)が算出される。これら補償量idcomp,iqcompによって、予測部33によって予測される予測電流ide,iqeが補正される。
(もっと読む)
初期補正機能を有するモーター駆動装置及び方法
【課題】本発明は、初期補正機能を有するモーター駆動装置及び方法に関する。
【解決手段】本発明の一実施形態によるモーター駆動装置は、モーターの駆動電流を提供するインバーターを介して当該モーターに流れる駆動電流に対応する電圧を検出する電流検出部と、当該電流検出部によって検出された検出電圧のピーク値を検出するピーク値検出部と、当該ピーク値検出部からの検出電圧をデジタル信号に変換するA/D変換部と、上記モーターの駆動開始時点から既設定された時間までの初期駆動区間に当該モーターを駆動させて上記A/D変換部からのデジタル信号に基づいて当該モーターの駆動電流のオフセットを補正する駆動制御部と、を含むことができる。
(もっと読む)
交流電動機の速度制御装置
【課題】磁束軸電流の過補償を抑制する。
【解決手段】交流電動機の速度制御装置は、トルク軸電流を比例積分制御するトルク軸電流制御器から出力されるトルク軸電圧成分を所定の値以下になるように制限するトルク軸電圧リミッタと、前記トルク軸電流制御器から出力されるトルク軸電圧成分と前記トルク軸電圧リミッタから出力されるトルク軸電圧指令とからトルク軸電圧飽和量を求める第1の減算器と、前記求められたトルク軸電圧飽和量を、推定器により推定されたトルク軸過渡電圧飽和量で補正する補正部と、前記補正されたトルク軸電圧飽和量を保持する第1の積分器と、前記保持されたトルク軸電圧飽和量と直交2軸座標の回転角速度とから磁束軸電流指令修正量を求めて出力する磁束軸電流指令修正器と、磁束軸電流指令から前記磁束軸電流指令修正量を減算し磁束軸電流指令修正指令を求めて出力する第2の減算器とを備えている。
(もっと読む)
モータ制御システム
【課題】1つのコンバータの出力電圧で複数のモータを駆動するモータ制御システムにおいて、各モータに対応して行われるフィードバック制御同士の干渉を防止してシステム電圧の可変制御を安定して滑らかに行えるようにする。
【解決手段】モータ制御システムは、コンバータと、2つのインバータと、2つの交流モータと、制御部とを備える。制御部は、少なくとも一方のモータついて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御されるようにシステム電圧を電流位相のフィードバック制御により可変するにあたり、電流ベクトルからそれぞれ求めたシステム電圧偏差が大きい方のモータをフィードバック制御の対象として選択する(S20〜S28)。
(もっと読む)
モータ制御システム
【課題】交流モータにおいて最適電流進角ライン上か又はその近傍での電流位相による矩形波制御を積極的に用いることによってシステム全体の損失を効果的に低減する。
【解決手段】モータ制御システム10は、バッテリ11からの直流電圧を昇降圧可能なコンバータ20と、コンバータ20による昇圧直流電圧を交流電圧に変換するインバータ22と、インバータ22から交流電圧が印加されて駆動される交流モータM1と、入力されるトルク指令値に応じてコンバータ20およびインバータ22を作動制御することにより交流モータを矩形波制御等の複数の制御方式で駆動制御可能な制御部26とを備える。制御部26は、交流モータM1が矩形波制御中であるとき、交流モータM1に流れるモータ電流のd軸q軸平面上における電流ベクトルの電流位相(id,iq)が最適電流進角ライン上に近づくようにシステム電圧指令値VH*を補正する。
(もっと読む)
モータ制御装置
【課題】モータ定数の設定誤差も含めて補償して、高精度なトルク制御が可能なモータ制御装置を提供することにある。
【解決手段】モータ制御装置100は、モータMOTに対するトルク指令値から求められた電流指令値が、モータMOTに電力変換器INVを介して供給される電流に対する電流検出値に一致するように、モータに供給される電流を制御する制御部を有する。制御部は、モータが出力するトルクを推定し、推定されたモータのトルク推定値が、トルク指令値に一致するようにモータに供給される電流を制御する。トルク推定演算部20は、モータが出力するトルクを推定する。位相誤差指令演算部25は、トルク推定値とトルク指令値との偏差から、位相誤差の指令値を算出する。速度推定演算部50は、位相誤差の指令値に、位相誤差推定値が一致するように、速度推定値を出力する。
(もっと読む)
回転機の制御装置
【課題】モデル予測制御において想定したモータジェネレータのモデルと実際のモータジェネレータの特性とにずれがある場合等にあっては、電流の予測精度が低下するため、制御性が低下するおそれがあり、これを改善する。
【解決手段】電流センサ16によって検出される実電流は、dq変換部22によって実電流id,iqに変換される。予測部33は、dq変換部22の出力する実電流id,iqを初期値として用いて、モータジェネレータ10を流れる電流を予測し、予測電流ide,iqeを算出する。フィードバック制御部40は、予測電流ideを実電流idにフィードバック制御するための操作量(補正量Δid)を算出し、フィードバック制御部44は、予測電流iqeを実電流iqにフィードバック制御するための操作量(補正量Δiq)を算出する。
(もっと読む)
回転機の制御装置
【課題】モータジェネレータ10を流れる電流の検出値をフィードバック制御するための操作量としての指令電圧の1電気角周期に渡る積分値をゼロにフィードバック制御する場合、電気角の検出値に誤差が生じることで、電流の検出値に重畳されたオフセット誤差を適切に補正できないこと。
【解決手段】モデル予測制御部30では、モデル予測制御によってインバータINVの今回の操作状態を表現する電圧ベクトルViを選択する。積分値算出部40では、電圧ベクトルViを入力とし、各相の印加電圧の積分値Δvu,Δvv,Δvwを算出する。補正部44u,44v,44wでは、これらをゼロにフィードバック制御すべく実電流iu,iv,iwを補正する。
(もっと読む)
回転機の制御装置
【課題】電流センサ16にオフセット誤差が生じる場合、モデル予測制御の制御性が低下するおそれがあること。
【解決手段】電流再現部22は、電流センサ16の検出する母線電流IDC等をdq変換することで実電流id,iqを算出し、予測部33に出力する。UVW変換部40の出力する予測電流iue,ive,iweは、セレクタ42によって選択的に偏差算出部44に出力される。一方、母線電流IDCは、セレクタ46を介して、そのままの値か、乗算器48によって「−1」が乗算された値かのいずれかが偏差算出部44に出力される。偏差算出部44では、セレクタ46の出力に対するセレクタ42の出力の差を算出し、フィードバック制御部50に出力する。フィードバック制御部50では、偏差算出部44の出力値をゼロにフィードバック制御するための操作量を算出する。
(もっと読む)
制御装置
【課題】トルク指令に基づいて電流指令を演算する際に、トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に振動成分が生じることを抑制できる回転電機の制御装置が求められる。
【解決手段】トルク指令に基づいて二相電流指令を演算するトルク電流演算部と、二相実電流を演算する実電流演算部と、二相電圧指令を二相実電流が二相電流指令に近づくように変化させる電流フィードバック制御部と、二相電圧指令に基づいて印加電圧を制御する電圧制御部と、を備え、トルク電流演算部は、トルク指令に周期的なトルク振動が含まれる場合に、第一軸電流指令を所定値に固定すると共に、第二軸電流指令を前記トルク振動に合わせて振動させる第一軸指令固定制御を実行する回転電機の制御装置。
(もっと読む)
回転機の制御装置
【課題】変調率が過度に大きくなる場合、制御量とその指令値との差を入力とする積分要素の出力値を参照するモデル予測制御によって、かえって制御性の低下を招くこと。
【解決手段】インバータの次回の操作状態を表現する電圧ベクトルV(n+1)は、ステップS20において、評価関数Jを最小とする電圧ベクトルに決定する。ここで、偏差edq(n+2)は、次回の操作状態として仮設定されたものによる予測電流ide(n+2),iqe(n+2)と指令電流idr,iqrとの差である。また、仮積分値Intは、前回までに採用された電圧ベクトルによって生じる偏差を入力とする積分要素の出力値(積分値In)に偏差edq(n+2)にゲインKiを乗算した値を加えたものである。ステップS28において変調率Mが閾値Mth以上であると判断される場合、積分値Inの更新を禁止する。
(もっと読む)
船舶用電気推進装置
【課題】蓄電池設備の容量(設置スペースおよび重量)を大きくせずに、船舶航行中の電池切れを防止するようにした電気推進装置を提供する。
【解決手段】陸上電源8から船舶内の蓄電池3を充電し、その電力によって推進用電動機2を駆動する船舶用電気推進装置において、船舶の目的地までの距離S1、速度の計画値v1、推進用電動機の消費電力計画値P1からなる第1群のデータまたは、GPS28、電力検出器32で実測された距離S2、速度v2、推進用電動機2の消費電力P2からなる第2群のデータのいずれかと蓄電池の電池残量A1とから、目的地まで到達可能な推進電動機の消費電力上限値を求め、電力上限値を推進用電動機2に印加された電圧で除算してトルク分電流上限値IqLIMを求め、推進力指示器によって設定される推進用電動機のトルク分電流指令値Iq*がトルク分電流上限値IqLIMを超えないように制限して推進用電動機2を駆動する。
(もっと読む)
1 - 20 / 220
[ Back to top ]