
Fターム[5H505JJ23]の内容
交流電動機の制御一般 (51,584) | 演算部の構成手段 (5,723) | 演算回路要素 (3,208) | 微分回路 (118)
Fターム[5H505JJ23]に分類される特許
41 - 60 / 118
永久磁石同期モータの駆動装置、空気調和装置、換気扇の駆動装置、洗濯機、自動車及び車両
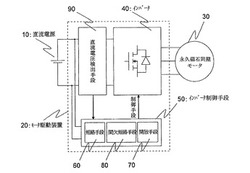
【課題】永久磁石同期モータが強制的に回転させられた場合に生じる回生電圧を部品点数の増加なしに抑制して低コスト化できる永久磁石同期モータの駆動装置、空気調和装置、換気扇の駆動装置、洗濯機、自動車及び車両を得ることを目的とする。
【解決手段】回生運転時に、直流電圧検出手段90が検出した増大する回生電圧に基づいてインバータ40と永久磁石同期モータ30の線間を短絡するようにインバータ40を制御する短絡手段60と、直流電圧検出手段90が検出する減少する回生電圧に基づいてインバータ40と永久磁石同期モータ30の線間を開放するようにインバータ40を制御する開放手段70と、直流電圧検出手段90が検出する増大する回生電圧に基づいてインバータ40と永久磁石同期モータ30の線間を開放と短絡を交互に行うようにインバータ40を制御する間欠短絡手段80と、を備えた。
(もっと読む)
モータ駆動制御装置

【課題】鎖交磁束の波形に含まれる高調波成分の影響を除去してトルクリプルを抑制できるモータ駆動制御装置を提供する。
【解決手段】モータ駆動制御装置において、回転子の角度検出値に基づいて変化するd軸交流信号をコイルに流すd軸電流の目標値であるd軸電流目標値に加算し、前記角度検出値に基づいて変化しd軸交流信号に対して1/4周期の位相差をもつq軸交流信号をコイルに流すq軸電流の目標値であるq軸電流目標値に加算する加算手段を有する。そして、d軸交流信号が加算されたd軸電流目標値に追従するようにd軸電流を制御し、q軸交流信号が加算されたq軸電流目標値に追従するようにq軸電流を制御する。
(もっと読む)
制御装置
【課題】矩形波制御に基づく制御の実行時に処理負荷を適切に低減することが可能な制御装置を実現する。
【解決手段】制御モード決定部20と、電圧指令値決定部33,43と、制御信号生成部23と、制御モード決定部20により決定された制御モードがパルス幅変調制御モードである場合に、制御信号生成部23の演算周期を、キャリア周期の1/2に設定された基準演算周期のN倍(Nは1以上の整数)の第一周期に設定するとともに、電圧指令値決定部43の演算周期を、第一周期のM倍(Mは2以上の整数)の第二周期に設定する演算周期設定部21と、を備え、演算周期設定部21は、制御モード決定部20により決定された制御モードが矩形波制御モードである場合に、電圧指令値決定部33の演算周期及び制御信号生成部23の演算周期の双方を、第二周期に設定する。
(もっと読む)
電動機の速度制御装置及び速度制御方法
【課題】目標値応答と外乱応答を個別に最適化可能な電動機の速度制御装置を提供する。
【解決手段】速度制御手段を、速度指令と速度帰還の偏差に積分ゲインGIを乗算して積分する積分増幅器221と、速度指令を共通の入力とし、比例ゲインGF1を有する不完全微分器の出力及び比例ゲインGF2を有する1次遅れ演算器の出力を加算して出力するフィードフォワード補償器224と、積分増幅器221の出力から速度帰還を減算すると共に、フィードフォワード補償器224の出力を加算する加減算器222と、この出力にゲイン調整パラメータGPを乗算してトルク指令を得る比例増幅器223とで構成する。速度指令応答時定数をτr、トルク外乱応答時定数をτd、電動機を含む負荷慣性モーメントをJとしたとき、G1=1/τd、GP=σr×J、GF1=1/(σr×τr)、GF2=1−τr/τdを満たすようにする。
(もっと読む)
回転電機制御装置
【課題】複数のバッテリセルが直列接続されたバッテリ群のコンディションに応じて適切に3レベルインバータを制御し、効率良く回転電機を制御する。
【解決手段】3レベルインバータ60は、正極電圧Pと負極電圧Nと正負両極間電圧が分圧された中間点電圧Mとの3レベルの電圧を交流出力電圧Vu,Vv,Vwとして出力可能であり、中間スイッチSmは、上段バッテリ31及び下段バッテリ32が直列接続されたバッテリ群33の中間接続点と正負両極間電圧の分圧点との電気的接続を開閉可能であり、回転電機制御装置10は、バッテリ群33の少なくとも温度に基づいてバッテリ群33の暖機が必要と判定した場合に、中間スイッチSmを閉じ、上段バッテリ31及び下段バッテリ32をそれぞれ流れる電流値が所定の切替周期以上で交互に偏重されるアンバランスモードで3レベルインバータ60をスイッチング制御する。
(もっと読む)
同期電動機の制御装置
【課題】電力変換回路の過電流保護と遮断回避を図るとともに、同期電動機に負荷外乱などに起因した不要電流が流れることを抑制した電動機の制御装置を提供する。
【解決手段】電力変換回路4から同期電動機SMに供給される一次相電流を電流検出器9,10で検出し、その検出値から電流成分演算回路7で電流成分を演算する。一方、周波数補正演算回路8で電流設定回路5で設定された電流設定値および電流成分演算回路7で演算された電流成分から周波数補正量を求め、加減速動作時には電流設定値の電流を流し、加減速動作の無いときには電流を抑制するようにする。そして、電圧指令演算回路3で一次周波数指令値から周波数補正量を減算して得られる一次周波数に基づいて一次電圧指令値を演算して電力変換回路4に出力する。
(もっと読む)
回転電気機械のトルクリプル抑制制御装置および制御方法
【課題】トルク脈動抽出フィルタのフィルタ次数を高くした場合にも、学習制御パラメータを自動調整して所望の抑制効果を得ることができる。
【解決手段】実システム33のトルク検出値Tdetに含まれるトルク脈動成分をトルクリプル抽出部34を通してn次複素フーリエ係数TAn、TBnの形で検出し、I−P制御部31により複素フーリエ係数TAn、TBnを0に抑制するように制御パラメータKp,kiを自動調整し、非干渉化部32で求めるn次補償電流IAn*,IBn*を使って回転電気機械のトルクリプルを抑制する手法において、トルク脈動抽出フィルタGFは高次ローパスフィルタとし、学習制御は、学習制御で求めるn次補償電流IAn*,IBn*のうち回転電気機械の応答を支配する低次の極のみをマッチングさせる部分的モデルマッチング手法で制御パラメータを自動調整する。
(もっと読む)
誘導電動機の制御装置及び制御方法
【課題】振動の原因となっている推定磁束の直流成分を除去し、モータの振動を低減する制御方式を実現した誘導電動機の制御装置又は制御方法を提供する。
【解決手段】誘導電動機の制御装置10は、誘導電動機106に供給される電流を、静止座標上のα相電流及びβ相電流に変換する3相/2相座標変換器108と、回転座標上のd軸成分の磁束電圧指令及びq軸成分のトルク電圧指令を、静止座標上のα相電圧指令及びβ相電圧指令に変換するdq/2相座標変換器120と、α相電流及びβ相電流と、α相電圧指令及びβ相電圧指令とを入力してα相磁束推定値及びβ相磁束推定値を算出する磁束推定器11と、α相磁束推定値及びβ相磁束推定値からオフセットを取り除くオフセット除去処理部12と、オフセット除去処理部12からのα相磁束推定値及びβ相磁束推定値を入力して誘導電動機106の速度を推定する速度推定器112と、を備える。
(もっと読む)
同期電動機の制御装置
【課題】同期PWM方式により同期電動機を駆動する場合であっても、位相遅れを補償し、電動機効率およびトルク低下を防止することができる同期電動機の制御装置を得る。
【解決手段】トルク指令、同期電動機2の固定子に流れる電流および回転子の位相に基づいて、同期電動機2に対する交流電圧指令を算出する電圧指令演算手段15と、交流電圧指令に基づいて、非同期PWM方式または同期PWM方式で同期電動機2を駆動する交流電圧を生成するPWMインバータ20と、同期電動機2の運転状態に基づいて、非同期PWM方式と同期PWM方式とを切り替える切替手段17と、非同期PWM方式および同期PWM方式で同期電動機2を駆動する場合の各々において、演算遅れおよびPWM応答遅れによる回転子の位相遅れを補償する位相補償手段18とを備え、電圧指令演算手段15は、位相補償手段18で位相補償された回転子の位相を用いて交流電圧指令を算出する。
(もっと読む)
自動ドア用モータ駆動制御装置
【課題】この発明は、交流電圧の電圧レベルと設計基準電圧レベルとの間にずれが生じる場合でも、より精度の高いモータの駆動制御を実現でき、自動ドアの動作不良が発生する可能性を低くすることができる自動ドア用モータ駆動制御装置を提供することを課題とする。
【解決手段】本発明による自動ドア用モータ駆動制御装置では、コンバータ部111からインバータ部213に対して出力される直流電圧出力111aの電圧レベルが電圧レベル検出部211によって検出する。電圧指令調節部212は、電圧レベル検出部211によって検出された検出電圧レベルと予め記憶している基準電圧レベルとの比に基づいて、電圧指令作成部112からの電圧指令112aを調節する。インバータ部213は、電圧指令調節部212によって調節された調節後電圧指令212aに基づいて直流電圧出力111aをパルス幅変調する。
(もっと読む)
電動機制御装置
【課題】インバータが電圧位相の制御により駆動されている場合であっても、インバータなどを含む電動機駆動装置において損失を生じさせてバッテリへの回生電力の余剰電力を消費させる。
【解決手段】電動機制御装置は、変調率Mが所定の変調率しきい値より小さいとき、電流位相制御モードを選択し、変調率Mが変調率しきい値以上のとき、電圧位相制御モードを選択するモード制御部15と、電圧位相制御モードの実行中且つバッテリを充電する充電電力に余剰電力が生じていることを条件として、変調率Mを変調率しきい値よりも低下させるためにコンバータにシステム電圧Vdcを上昇させることを判定する昇圧判定部13と、電流位相制御モードにおいて、交流電動機のトルクを維持した状態で、界磁電流を余剰電力に応じて増大させる高損失制御部12とを備える。
(もっと読む)
電気車制御装置
【課題】PMSMのγ,δ軸電流の振動や機械的な振動に起因した加速度推定の遅れを低減する。
【解決手段】PMSM4を駆動するインバータ部3の電圧指令値と電流検出値とから回転子の位置誤差を推定する位置誤差推定部31、及び、位置誤差推定値から回転子位置推定値を演算する位相推定部25Aを有し、トルク指令値及び回転子位置推定値に基づいてベクトル制御を実行するセンサレスベクトル制御部2Aと、前記位置誤差推定値に基づいてPMSM4の加速度を推定する加速度推定部32と、この加速度推定部32により生成された加速度推定値に基づいて車輪とレールとの間の空転状態を推定し、前記トルク指令値を調整するための加減速トルクを生成する空転滑走制御部7Aと、を備える。
(もっと読む)
永久磁石モータのトルクリプル抑制制御装置、電動パワーステアリングシステム
【課題】トルクリプルの直流成分を有効に使うことができるトルクリプル抑制制御装置および電動パワーステアリングシステムを提供する。
【解決手段】誘起電圧係数設定部8は、位置検出器5からの位置検出値θdcに基づいて永久磁石モータ1の誘起電圧係数に関する情報信号Ked,−Ked,−ΔKed,Keqおよび−ΔKeqを出力する。トルクリプル抑制演算部9は、この各情報信号に基づいて電流補正指令値ΔId*,ΔIq*を出力する。電流補正指令値ΔId*,ΔIq*は、電流指令変換部7からの電流指令値Id0*,Iq0*と加算され、電流指令値Id*,Iq*として電流制御演算部10へ出力される。電流制御演算部10は、電流検出値Idc,Iqcに基づいて電圧指令値Vdc*,Vqc*を座標変換部11へ出力する。座標変換部11は、電圧指令値Vdc*,Vqc*と位置検出値θdcを用いて三相交流の電圧指令値vu*,vv*,vw*を電力変換器2へ出力する。
(もっと読む)
電動機駆動装置、および、これを用いた電動パワーステアリング装置
【課題】多系統電動機駆動装置を低コストで提供する。
【解決手段】モータ80を駆動する2系統電動機駆動装置2において、電流検出器751、752が検出したインバータ601、602の出力電流は各相毎に加算され、出力電流の和であるIu、Iv、Iwが3相2相変換手段25にフィードバックされ、座標変換される。また、2相3相変換手段35は、同一の3相電圧指令値PWMu、PWMv、PWMwを2個のインバータ601、602へ分岐して出力する。これにより、3相2相変換手段25の個数、2相3相変換手段35の個数はいずれも1個であり、インバータの個数である2個より少ない。そのため、マイコンの演算負荷を低減することができ、低コストで2系統電動機駆動装置2を提供できる。
(もっと読む)
絶縁劣化検知装置及び車載高電圧系統
【課題】簡易な構成により、絶縁劣化の発生検知及び絶縁劣化箇所の特定を容易に行うこと。
【解決手段】電力ラインL上に設けられ、インピーダンス成分を有するコイル11と、電力ラインL上において、コイル11よりも車載コンポーネント2側に設けられた接続点P1と車体アースとの間に直列的に接続されたコンデンサ12および電圧検出用抵抗13と、コンデンサ12および電圧検出用抵抗13と直列に接続されるとともに、コンデンサ12およびコイル11とで決定される共振周波数よりも高い周波数の電圧を印加する発振源14と、電圧検出用抵抗13の両端電圧を検出する電圧検出部15と、電圧検出部15によって検出された両端電圧に基づいて、車載コンポーネント2の絶縁劣化を判定する判定部16とを具備する絶縁劣化検知装置3を提供する。
(もっと読む)
駆動装置、駆動方法、及び装置
【課題】簡易な構成でありながら位置決め精度を高められる駆動装置、駆動方法、及び装置を提供する。
【解決手段】駆動装置(1a)は、回転駆動する駆動部(10)と、駆動部(10)の駆動出力軸の回転角度位置を検出し第1の位置情報を生成する第1の位置検出器(31)と、駆動部(10)の駆動出力軸に接続された減速機(20)と、減速機(20)の減速出力軸の回転角度位置を検出し第2の位置情報を生成する第2の位置検出器(32)と、第1の位置情報と前記第2の位置情報とを選択的に用いて駆動部(10)を制御する制御部(100a)と、を備える。
(もっと読む)
回転電機の減磁判定システム
【課題】回転電機の運転状態に拘わらず精度良く、永久磁石の減磁を判定する技術を提供する。
【解決手段】減磁判定システム10は、永久磁石型の回転電機の多相コイルに流れる電流を永久磁石が発生する磁界の方向であるd軸と当該d軸に直交するq軸とのベクトル成分に座標変換してフィードバック制御する際のq軸目標電圧を実q軸電圧vqとして取得する実q軸電圧取得部1と、永久磁石に減磁が生じていない状態でのq軸目標電圧を基準q軸電圧vqrとして取得する基準q軸電圧取得部2と、少なくとも力行運転状態か回生運転状態かの区分を表す運転状態区分と実q軸電圧vqと基準q軸電圧vqrとに基づいて永久磁石の減磁の状態を判定する減磁判定部7とを備える。
(もっと読む)
電源システムの制御装置およびそれを搭載する車両
【課題】電源システムの制御装置において、部品追加を行なうことなく、コンバータのリアクトルを流れる電流を検出するための電流センサの異常を検出することによって、コンバータの信頼性を向上する。
【解決手段】電源システム20は、蓄電装置28と、リアクトルL1を有するコンバータ12と、リアクトルL1を流れる電流を検出するための電流センサ18とを含み、負荷装置45に電源を供給する。そして、電源システム20の制御装置30は、電圧制御部210と、電流制御部220と、電流制御部220の制御出力に基づいてコンバータ12の駆動指令を生成する駆動指令生成部230と、電流制御部220の制御出力を変更するための変更量を生成する指令変更部260と、電流制御部220の制御出力が変更されている期間における、電流センサ18により検出された電流検出値に基づく電流変化量と、変更量に基づいて演算により求められた基準となる電流変化量との比較によって、電流センサ18の異常を検出するセンサ監視部280とを備える。
(もっと読む)
電動機の制御装置
【課題】高応答な電流制御を行う電動機の制御装置を提供する。
【解決手段】IP制御のKpおよびKiは、埋込磁石同期モータに流れる電流の目標値であるIrefと埋込磁石同期モータに流れる電流であるIdetとの比を伝達関数により表したIdet/Iref=Ki/{L*s2+(Kp+R)*s+Ki}(ただし、Lは埋込磁石同期モータのインダクタンス、Rは埋込磁石同期モータの電機子巻線抵抗)に基づいて決定され、IP制御にFFを付加した2自由度の制御にて、埋込磁石同期モータに流れる電流の目標値であるIref′と埋込磁石同期モータに流れる電流であるIdet′との比であるIdet′/Iref′=(Ki+FF*s)/{L*s2+(Kp+R)*s+Ki}を用いて算出されるステップ指令に対する定常偏差に最終値の定理を適用し、ステップ指令に対する定常偏差をゼロにするFFを求める。
(もっと読む)
モータの電流制御方法及び制御装置
【課題】モータの能力を極力引き出し,安定性を確保しながらの高速高出力化を実現する電流制御方法及び制御装置を提供する。
【解決手段】交流電源を整流・平滑して直流の主回路電圧を出力するコンバータ部1と,主回路電圧を用いてモータ5を駆動させる為の電流を流すインバータ部2と,モータ5に流れる電機子電流を検出する電流検出器4と,モータ5に取り付けられたモータ速度を検出する位置検出器6と,q軸電流指令Iqrを受けて,電流検出器4からのデータと位置検出器6からのデータとを用い,インバータ部2を駆動する信号を出力し,モータ5に流れる電機子電流を制御する電流制御部3とを備えた。
(もっと読む)
41 - 60 / 118
[ Back to top ]