
Fターム[5H505LL12]の内容
交流電動機の制御一般 (51,584) | 検出変量、検出手段 (8,979) | 速度の検出 (1,620) | 速度検出器を用いないで速度を検出するもの (581)
Fターム[5H505LL12]の下位に属するFターム
電気的変量の検出によるもの (374)
磁気的変量の検出によるもの (9)
Fターム[5H505LL12]に分類される特許
1 - 20 / 198
インバータ装置
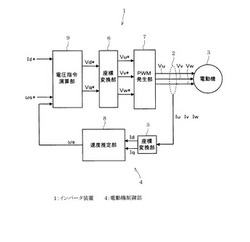
【課題】速度センサレス制御により電動機を駆動するものにおいて、フリーラン状態の電動機の回転速度を精度良く同定することができるインバータ装置を提供する。
【解決手段】本実施形態のインバータ装置は、電動機の回転速度を検出する速度検出手段を用いることなく速度センサレス制御により電動機を駆動する電動機制御部を備えたインバータ装置である。電動機制御部は、電動機がフリーラン状態であるときの回転速度を所定のパラメータを用いた条件に基づいて同定する速度サーチ機能と、電動機を実際の運転条件に基づいて運転させながらパラメータをティーチングするティーチング機能とを有する。
(もっと読む)
コンベヤ駆動装置

【課題】部品点数を削減して納期の短縮化とコストダウンを図り得ると共に、効率を高めて省エネルギ化とコンパクト化を図ることができ、更に外観向上をも図り得るコンベヤ駆動装置を提供する。
【解決手段】コンベヤ1の駆動軸2をダイレクトドライブ方式で回転駆動する永久磁石同期モータ3が、低保持力の永久磁石である可変磁石を備えた可変磁束モータ3aであり、回転数に応じて可変磁石に磁化電流を供給し磁束を制御することにより、可変磁束モータ3aが所定の回転数範囲内でトルク一定となるよう構成する。
(もっと読む)
永久磁石同期電動機の制御装置
【課題】永久磁石同期電動機の電気的定数に設定誤差が存在しても最大トルク/電流制御を実現する。
【解決手段】実施形態によれば、比例制御器と積分制御器の出力の和に非干渉化のためのフィードフォワード項を加算するフィードフォワード制御手段と、積分制御器の出力を用いて回転子速度および回転子位置を推定する推定手段と、電動機に流れる電流を最小としながら最大のトルクを得る最大トルク/電流制御の制御式に電動機の電気的定数を適用して補正前D軸電流指令値を出力するD軸電流指令手段と、最大トルク/電流制御を実行する場合に補正前D軸電流指令値の設定ずれを補正可能なように決定された補正角ΔθCompとQ軸電流指令値IqRefを用いて、IdRef′=IdRefcosΔθComp−IqRefsinΔθCompにより補正前D軸電流指令値IdRefを補正してD軸電流指令値IdRef′を出力する電流位相補正手段とを備えた。
(もっと読む)
電力変換装置
【課題】交流一周期に出力するPWMパルス数の減少による、基本波成分における電圧出力誤差拡大の影響を回避する。
【解決手段】べクトル切り替え位相角およびゼロ電圧ベクトル出力角度幅を、ベクトル切り替え位相角を電圧位相角とする第一の複素ベクトルと、ゼロ電圧ベクトル出力角に応じた位相角に2/3πの位相遅れおよび位相進み処理を行った第二、第三の複素ベクトルの三種類のベクトルの合成ベクトルが、虚数成分が0、且つ、実数成分が前記電圧指令値の振幅に比例した値となるよう決定する。
(もっと読む)
同期電動機のための回転子位相推定装置
【課題】 本発明は、回転子に永久磁石を有する同期電動機のための駆動制御装置に使用される回転子位相推定装置、特に、同一次元状態オブザーバに基づく回転子位相推定手段を有する回転子位相推定装置に関し、電動機パラメータに独立した安定性(安定性の度合いの指定を含む)、電動機パラメータに独立したフィルタ特性(通過帯域の中心周波数、幅の指定を含む)を状態オブザーバに付与できる回転子位相推定装置を提供することにある。
【解決手段】 状態オブザーバの性能を支配するオブザーバゲインGi、Gmに関し、駆動用固定子電圧の正相分(または逆相分)から回転子磁束推定値の正相分(または逆相分)に至る伝達関数が、予め定めた安定2次複素フィルタに概ね等しくなるように、複素フィルタの実数係数を利用してオブザーバゲインGi、Gmを設定するようにし、課題を解決した。
(もっと読む)
交流電動機の制御装置
【課題】 運転状態によって電動機特性が大きく変動してもロバストで高効率な位置センサレス駆動を可能とする交流電動機の制御装置を提供する。
【解決手段】 トルク指令T*を制御位相θ∧を用いて分解し、交流電動機の機械出力に寄与する成分をδ軸電流指令、寄与しない成分をγ軸電流指令として出力する電流分配器3Aと、前記δ軸、γ軸電流指令とδ軸、γ軸電流検出のそれぞれが一致するように制御する電流制御器5と、前記電流制御器の出力と前記交流電動機のインダクタンスでの電圧降下量との加算量のγ軸成分がゼロとなる位相を算出し、前記制御位相θ∧として出力する位相推定器8と、を備える。
(もっと読む)
モータ
【課題】不平衡なV結線の巻線構成においてセンサレスで制御するモータを提供する。
【解決手段】端子間インピーダンスが不平衡であるため各相電圧が不平衡となるV結線のモータにおいて、端子間電圧とY相の電流IyとZ相の電流Izを検出し、自己インダクタンスの電圧成分、相互インダクタンスの電圧成分、巻線抵抗による電圧降下成分を計算して巻線の誘起電圧成分を求め、この誘起電圧成分よりロータ回転位置θreを検出し、電圧、電流を制御するモータ。
(もっと読む)
モータ制御装置
【課題】永久磁石同期モータのセンサレス制御の安定性を向上することができるモータ制御装置を提供する。
【解決手段】モータの回転数を回転数検出手段によらないで変化させる所定の監視対象の変化量を検出し、コントローラで認識される回転数を補正するフィードフォワード制御手段を備える。
(もっと読む)
モータ制御装置
【課題】永久磁石同期モータのセンサレス制御の安定性を向上することができるモータ制御装置を提供する。
【解決手段】ロータ位置検出手段(10)は、検出した誘起電圧波高値と推定誘起電圧波高値との間の誘起電圧差をなくすべくパラメータを補正するモータパラメータ補正手段(30)を有し、該補正したパラメータに基づいて前記ロータ位置を検出する。
(もっと読む)
モータ制御システム
【課題】2相以上のスイッチング素子のターンオンを同期させることなく、常に1相とすることでダイオードに流れるリカバリ電流のピーク電流を1相分に抑制し、素子や搭載される構成部品の信頼性,低損失,低騒音,低ノイズを比較的に安価な構成で実現することができるモータ制御装置,モータ制御システム,モータ制御モジュールを提供することを目的とする。
【解決手段】PWM制御器は、インバータを駆動するためのPWM制御信号を演算するPWM制御信号変換器と、PWM制御信号変換器から各相の制御信号を受け、当該各相の制御信号が各々所定時間の間隔を空けていない場合には、所定時間の間隔を空けるように少なくとも一の相の制御信号を補正するPWM制御信号補正器とを有するモータ制御システム。
(もっと読む)
PWMインバータの制御装置およびPWMインバータの制御装置を備えた鉄道車両
【課題】鉄道車両において、非同期PWMから同期PWMにかけてPWMパルスの出力を変調でき、電動機から発生する電磁騒音を抑制する高調波抑制手段を提供する。
【解決手段】速度検出部101、ベクトル制御演算部102、PWM制御演算部103、キャリア周波数104、変調率制御量生成部105より構成されるPWMインバータ制御装置9において、不連続かつ不規則に平均値≒0となるテーブルにより値を変化させ、キャリアの半周期ごとに符号を反転させることを特徴とする変調率制御量ΔVcを、変調率基準値Vc0に加算し、PWM制御演算部に入力することを特徴とするPWMインバータ制御装置。
(もっと読む)
電動オイルポンプ用モータ制御装置及び制御方法
【課題】ブラシレスモータ駆動オイルポンプを、脱調せず、安定に制御する。
【解決手段】機械式と電気式オイルポンプの給油を切替る給油切替機構と、給油情報を用いて、電動機トルクを定める第1の電流指令信号と電動機速度偏差で定まる第2の電流指令信号の和信号を与える制御指令発生手段と、制御指令発生手段の出力とセンサレス電動機の負荷電流の差からベクトル制御を実行する電動機制御手段を備え、制御指令発生手段は、第2の電流指令信号を得るための速度制限手段を備え、速度制限手段は、第1の上限値と第1の下限値を有し、回転速度がこの範囲を逸脱するときに回転速度変動を抑制する方向の第2の電流指令信号を与え、かつ所定時間以上逸脱状態が継続したときに、逸脱継続方向に変化した回転速度についての新しい第1の上限値と第1の下限値を設定する。
(もっと読む)
電動オイルポンプ用モータ制御装置及び制御方法
【課題】安定制御ができるセンサレス電動オイルポンプ用モータ制御装置。
【解決手段】機械式と,電気式オイルポンプからの給油を選択する給油切替機構と、上位制御装置からの給油情報を用いて、電動機トルクを定める信号と電動機の速度偏差で定まる信号の和信号を与える制御指令発生手段と、制御指令発生手段の出力とセンサレス電動機の負荷電流の差からベクトル制御を実行する電動機制御手段とを備え、電動機起動の第1段階では、電動機をトルク一定とする信号で起動し、第2段階ではトルク一定とする信号と速度偏差に基づく信号の和を目標値とする電流帰還信号により駆動し、第3段階では上位制御装置からの給油の情報を用いて定めたトルクと速度の目標信号から定めた電流指令信号による電流帰還信号により駆動する。
(もっと読む)
回転機の制御装置
【課題】過変調領域においてモデル予測制御を行うと、制御量の平均値と指令値との間に乖離が生じること。
【解決手段】操作状態決定部34の評価関数Jは、電圧ベクトルVi(i=0〜7)のそれぞれに対応する予測電流ide,iqeと指令電流idr,iqrとの差が小さいほど、該当する電圧ベクトルを高く評価する。評価関数Jの評価が最も高い電圧ベクトルが次回の操作状態に設定される。ハイパスフィルタ40,50では、予測電流ide,iqeから高調波成分を抽出し、これに応じて高調波電流補正量idh,iqhが算出される。評価関数Jの入力パラメータとしての指令電流idr,iqrは、高調波電流補正量idh,iqhによって補正される。
(もっと読む)
インバータ負荷模擬装置
【課題】インバータと接続された状態において、処理が複雑化するのを回避しつつ相電圧が平衡するように運転することが可能なインバータ負荷模擬装置を提供する。
【解決手段】電圧補正部22は、2相/3相変換部21から出力された相電圧指令を、インバータ負荷模擬装置100の相電圧を各相の間で互いに平衡した状態にするための補正指令へと変換する。ローパスフィルタ7は線間電圧から基本波成分を取り出す。線間電圧検出部6は、ローパスフィルタ7によって取り出された線間電圧の基本波成分を用いて線間電圧を検出する。電圧補正部22は、補正指令と相電圧指令との差としての補正量を算出するとともに、その補正量に対してローパスフィルタ7と同じフィルタ処理を実行する。電圧補正部22は、フィルタ処理後の補正量と線間電圧検出部6によって検出された線間電圧とを用いて線間電圧の変化分を補正する。
(もっと読む)
制御装置
【課題】モータの動作に精度が要求されるときに、インバータのPWM方式の切り替えに伴い発生するモータのトルク変動の影響を回避でき、モータの動作に精度が要求されないときに、PWM方式の切り替えによる効果を得ることができる制御装置を得ること。
【解決手段】制御装置は、複数のPWM方式のうちインバータのPWM動作に用いるためのPWM方式の切り替えを行う切り替え部と、動作指令信号により第1の動作が指令されたと判断した場合、前記切り替え部によるPWM方式の切り替えを不許可とし、前記動作指令信号により第2の動作が指令されたと判断した場合、前記切り替え部によるPWM方式の切り替えを許可する指令判断部とを備え、前記切り替え部は、前記指令判断部により切り替えが不許可とされた場合、PWM方式の切り替えを行わず、前記指令判断部により切り替えが許可された場合、PWM方式の切り替えを行う。
(もっと読む)
モータ駆動装置及び圧縮機及び冷凍サイクル装置及び洗濯機及び洗濯乾燥機及び送風機
【課題】モータ駆動中の振動抑制及び振動による機器の劣化や騒音発生によるユーザ不満を解消する。
【解決手段】この発明に係るモータ駆動装置100は、負荷を駆動するモータ3と、モータ3に電圧を印加するインバータ2と、インバータ2が出力する電圧を制御するインバータ制御手段4と、モータ3の所定の箇所に取り付けられて、モータ3の振動を検出する振動検出手段5と、振動検出手段5の出力からモータ3の回転軸に対して接線方向の振動成分を分離する振動分離手段6と、振動分離手段6の出力に基づいて、振動を抑制するための信号を出力する振動抑制制御手段7と、を備え、インバータ制御手段4は、振動抑制制御手段7の出力に基づいてインバータ2にて印加する電圧を制御するものである。
(もっと読む)
モータ駆動制御装置及びこれを使用した電動パワーステアリング装置
【課題】電圧利用率を改善しつつ、デューティ制約を満たすことができるモータ駆動制御装置及びこれを使用した電動パワーステアリング装置を提供する。
【解決手段】直流電源41に接続された3相モータ12を駆動するモータ駆動回路40と、3相モータのモータ電流を検出する単一のモータ電流検出部42と、モータ電流検出値に基づいて3相モータの各相電流値を求める各相電流演算部35と、電流指令値を演算するモータ電流指令部34と、演算した電流指令値と前記各相電流値との電流偏差に応じて3相駆動電圧値を演算する3相駆動電圧演算部37と、電圧利用率改善及び3相駆動電圧波形補正を行う補正演算式に従って前記3相駆動電圧値を補正して3相駆動電圧補正値を演算する3相駆動電圧補正部38と、演算した3相駆動電圧補正値に基づいて前記モータ駆動回路を制御するパルス幅変調信号を生成するパルス幅変調信号生成部39とを備えている。
(もっと読む)
駆動装置、駆動方法、及び装置
【課題】簡易な構成でありながら位置決め精度を高められる駆動装置、駆動方法、及び装置を提供する。
【解決手段】駆動装置(1a)は、回転駆動する駆動部(10)と、駆動部(10)の駆動出力軸の回転角度位置を検出し第1の位置情報を生成する第1の位置検出器(31)と、駆動部(10)の駆動出力軸に接続された減速機(20)と、減速機(20)の減速出力軸の回転角度位置を検出し第2の位置情報を生成する第2の位置検出器(32)と、第1の位置情報と前記第2の位置情報とを選択的に用いて駆動部(10)を制御する制御部(100a)と、を備える。
(もっと読む)
電動機の制御装置および制御方法
【課題】1台の電圧形インバータで誘導電動機と同期電動機の双方を所望の速度に制御する。
【解決手段】誘導電動機速度制御器12は、誘導電動機1の回転速度指令値ωIM*と、誘導電動機1の回転速度ωIMとの偏差から比例積分制御等により磁極方向電流指令値Id*を演算する。同期電動機速度制御器13は、同期電動機2の回転速度指令値ωSM*と、同期電動機2の回転速度ωSMとの偏差から比例積分制御等により磁極直交方向電流指令値Iq*を演算する。dq軸電流制御器14は、磁極方向電流指令値Id*と磁極方向電流値Idとの偏差、および、磁極直交方向電流指令値Iq*と磁極直交方向電流値Iqとの偏差から、比例積分制御等により磁極方向電圧指令値Vd*および磁極直交方向電圧指令値Vq*を演算する。
(もっと読む)
1 - 20 / 198
[ Back to top ]