
Fターム[5H530CC01]の内容
Fターム[5H530CC01]の下位に属するFターム
位置精度を高めるもの (34)
許容位置誤差の大きいもの (1)
累積誤差を減少させるもの
Fターム[5H530CC01]に分類される特許
1 - 20 / 20
DCモータ天井扇風機
【課題】起動時の回転子の位置決めをすることなく、確実にモータを所望の方向に回転させ、使用者に逆転による不安感を与えないDCモータ天井扇風機を提供する。
【解決手段】ブラシレスDCモータの回転子磁石(磁石6)の磁極位置をセンサレスで検出する位置検出手段15を備え、天井扇風機を停止させるときに、ブラシレスDCモータの特定の相に一定の時間以上通電し、前記天井扇風機の羽根の停止位置が、最終の通電相に対して常に一定になるように制御する停止位置固定手段17を備えたので、停止した状態から、通常の回転動作に移行することが可能になる。
(もっと読む)
電動回転ベッドの回転装置

【課題】ベッドメイクなどの時間を短縮したり、使用者の利便性を高めたりすることができるよう、所定の位置で停止する電動回転ベッドを提供する事。
【解決手段】駆動源のモータ3と、モータ3の回転に連動して回転をするベッドと、ベッドがある特定位置になった時に信号を出す位置センサ14と、モータ3を制御する制御回路とがあり、位置センサ14からの信号をもとに、制御回路を用いて、モータ3の停止制御を行い、回転するベッドを所定の位置に停止する。
(もっと読む)
電動機の駆動制御方法
【課題】モータが負荷保持停止位置で停止する時間を各相コイルで均一になるように駆動制御することで、各相コイルの発熱温度を均一化させた電動機の駆動制御方法を提供する。
【解決手段】制御回路7はモータコイル3に通電状態で、かつロータ2が負荷保持状態で回転停止させたロータ2の回転停止位置である負荷保持停止位置を、前回ロータ2が回転停止した負荷保持停止位置に対して電気角で((180/n)°;nは相数であり、2以上の整数)だけ所定回転方向にロータ2を回転させた位置で停止させる。
(もっと読む)
減速装置
【課題】停止時のバックラッシを無くして、外力による画像のゆれを低減するとともに、動作時のバックラッシを確保して低負荷での円滑な回転駆動を行う。
【解決手段】2つのウォーム8,9が嵌合され、ウォーム8,9の回転により減速して回転するウォームホイール7と、ウォームホイール7の回転により回転し、制御対象を回転させる出力軸6と、各ウォーム8,9を個々に回転させる電動機16,17とを備えた。
(もっと読む)
モータ制御装置
【課題】直流電源に接続されたインバータ及び平滑コンデンサと、インバータで駆動される交流モータとを備えたモータ制御システムにおいて、交流モータで電気エネルギを消費して平滑コンデンサの電荷を放電する際に交流モータの意図しない回転を抑制する。
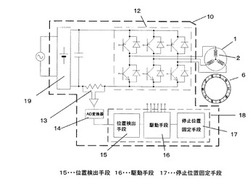
【解決手段】平滑コンデンサ33に蓄えられた電荷を放電する際に、ロータ回転位置センサ34で検出したロータ回転位置と目標位置との偏差を小さくするように交流モータ12の指令電圧ベクトルを制御する回転位置F/B(フィードバック)制御を実行する。その際、放電開始時に回転位置センサ34で検出したロータ回転位置を目標位置として設定することで、回転位置F/B制御によって、交流モータ12のロータ回転位置を放電開始時のロータ回転位置付近に維持する。これにより、交流モータ12をほとんど回転させないようにすることが可能となり、交流モータ12の回転による不具合を確実に防止する。
(もっと読む)
電動アクチュエータの制御装置
【課題】電動アクチュエータと外部制御装置との間における入出力点数と信号線の配線工数を少なくする。
【解決手段】電動アクチュエータは、基台に往復動自在に装着されたスライドテーブルを有しており、スライドテーブルはモータにより回転される送りねじ軸により前進限位置と後退限位置との往復動ストローク端の間で駆動される。スライドテーブルを各ストローク端に移動させたときの当該ストローク端における送りねじ軸の回転数の基準回転数N0,N1は予めメモリに記憶されている。スライドテーブルが停止したときの送りねじ軸の駆動回転数Nと基準回転数N0,N1とを比較し、駆動回転数Nと基準回転数N0,N1とが一致したときには、スライドテーブルの停止位置がストローク端であることが判定される。
(もっと読む)
モータ制御装置およびモータ制御方法
【課題】往復移動するキャリッジを駆動するためのモータを制御する際に、キャリッジの動作が不安定になることを抑制する。
【解決手段】往復移動するキャリッジを駆動するためのモータを制御するモータ制御装置は、モータの回転数に相関する回転数相関値を検出する相関値検出部と、キャリッジとキャリッジの移動経路の端に配置された端部部材との接触を検出する接触検出部と、回転数相関値に基づきモータに駆動電圧を供給してモータの制御を実行する制御実行部と、を備える。制御実行部は、接触の検出後の所定の期間において回転数相関値に基づくモータの制御を実行しない。
(もっと読む)
モータ駆動装置及び光学機器
【課題】高速駆動が可能で、所定位置に駆動後、通電を切った時の停止位置精度を向上させ、省エネと高精度の両立を図ることのできるモータ駆動装置、及び該モータ駆動装置を備えた光学機器を提供する。
【解決手段】
モータ駆動装置は、コイルとロータを有するモータと、ロータの位置による信号を出力するロータ位置検出手段と、ロータ位置検出手段の出力に応じてモータのコイルへの通電状態を切り替える第1駆動モードと、決められた時間間隔によってコイルへの通電状態を切り替える第2駆動モードとを用いて目標位置にモータを駆動する制御手段と、を備えたモータ駆動装置であって、制御手段は、目標位置への駆動完了によりコイルへの通電を切った後、ロータ位置検出手段によってロータの位置が目標位置からずれていることを検出した場合は目標位置への駆動完了時における通電条件で所定時間の間、コイルに通電を行うことを特徴とする。
(もっと読む)
モータ制御回路およびカーナビゲーションシステム
【課題】モータ駆動する構造体が正常に停止したか障害物に衝突したかを正確に判断して、構造体が障害物に衝突したときには、構造体を障害物から隔離することができる技術を提供することを目的とする。
【解決手段】障害物検知部22は、モータ電流値の立ち上がりを検知することにより、モータ駆動部3の負荷状態を検知する。目標位置設定部23は、FGパルスのパルス数を計測することにより、モータ駆動部3の駆動範囲を計測する。目標位置設定部23が計測した駆動範囲がユーザが設定した駆動範囲に満たないにもかかわらず、障害物検知部22がモータ駆動開始時から次回にモータ電流値の立ち上がりを検知する場合がある。この場合には、モータ制御回路2は、モータ駆動部3が障害物に衝突したと判断して、モータ駆動部3を障害物から安全な場所に隔離することができる。
(もっと読む)
アクチュエータにおける原点出し方法およびアクチュエータにおける原点出しストッパ装置
【課題】 作動領域端で、高速での原点復帰が可能となり、装置の原点出し時間の短縮を図ることができるアクチュエータにおける原点出し方法およびアクチュエータにおける原点出しストッパ装置を提供する。
【解決手段】 ハウジング内に設けられた駆動機構によって一定の作動領域内で往復動操作されるスライダを、ストローク端で停止させるアクチュエータにおける原点出し方法において、上記ストローク端に、緩衝材25,26と剛体部8,9からなるストッパ装置を配設し、上記スライダ5を通常の駆動速度で上記ストローク端まで移動させてストッパ装置の緩衝材25,26に当接させて減速させ、さらにスライダ5を作動して、上記通常速度より極低速状態で上記ストッパ装置に押し当てて、緩衝材25,26の弾性に抗して緩衝材25,26を押し込み、該ストッパ装置の剛体部8,9によってスライダ5を停止させて原点出しをすることにある。
(もっと読む)
移動体の緊急停止装置
【課題】サーボモータ208を使用して移動体(移動テーブル302)をμm単位で位置制御して精密に位置決めする位置決め装置300において、移動体(302)の衝突を避け、しかも、ブレーキのトルクによる衝撃を緩和する。
【解決手段】モータ(208)で駆動される移動体(302)を非常時に急停止させるための緊急停止装置において、移動体(302)の位置範囲をもとに、機械リミット306A、306Bに近い位置範囲(急減速範囲A、C)では制動力を強め、機械リミット306A、306Bから遠い位置範囲(通常減速範囲B)では制動力を弱める制御を行なう。
(もっと読む)
モータ制御装置およびそれを備えたステージ装置
【課題】 駆動軸に対する負荷のアンバランスがある状態で、異常発生時の停止を行なった場合でも、負荷のアンバランスに応じたバランスの取れた駆動力で駆動軸を駆動し、機械ストレスの発生を抑制することができるモータ制御装置およびそれを備えたステージ装置を提供する。
【解決手段】 第1軸である駆動軸に対する第2軸である負荷軸の、前記駆動軸に対する負荷の不平衡量を示す負荷情報に基づいて、前記駆動軸を制御停止または非常停止させる停止制御部を有する、モータ制御装置を備える。
(もっと読む)
3相ブラシレスDCモータの停止装置
【課題】従来、3相ブラシレスDCモータの3相コイルのうちの2相に励磁電流を流し続けてロータを外力に抗して所定の位置に停止し続ける電気式ブレーキは得られていない。
【解決手段】本発明の3相ブラシレスDCモータの停止装置は、3相ブラシレスDCモータの3相コイル駆動制御用パワー段を有し、上記3相ブラシレスDCモータのロータ停止位置をホールIC信号として検出し、この検出状況に応じて上記3相コイル中の2相の励磁を継続せしめる。
(もっと読む)
ローラーブラインドアクチュエータを制御する方法
本制御方法は、交流電圧によってモータ(MOT)に通電する電力線路上でそれぞれ一方がもう一方の上流側に配置された遠隔制御ユニット(RCU)およびモータ駆動用ユニット(MCU)によって、第1の方向(DIR1)および第2の方向(DIR2)に建物の可動器具(LD)を操作する前記モータを備える電気機械式アクチュエータ(ACT)に適用される。停止指令が、その信号の極性に係らない半波整流信号を備えることを特徴とする。 (もっと読む)
モータ制御装置
【課題】 移動終点に移動体が到達しない状態ではモータに対して駆動電流を確実に供給し続けるモータ制御装置を得る。
【解決手段】 本モータ制御装置10では、ロック電流が流れるよりも前にモータMに流れる電流の最大値に対応した信号電圧の電圧値がオペアンプA1を含めて構成されるピークホールド部28に記憶される。ここで、モータMの駆動開始直後には、その後にモータMに定常的に流れる駆動電流よりも遥かに大きな突入電流が瞬間的に流れる。したがって、ピークホールド部28には、突入電流の電流値に対応した信号電圧の電圧値が記憶される。また、ロック電流が流れた際に、このロック電流の電流値に対応した信号電圧の電圧値がピークホールド部28に記憶されている電圧値以上になるとMOSFETQ1のゲート端子に入力される信号電圧がHighレベルからLowレベルに切り替わり、モータMに対する駆動電流の供給が停止される。
(もっと読む)
固定装置におけるモータ制御
【課題】 モータによって駆動される移動部を所定の位置に固定する装置の構成が複雑化することを抑制する技術を提供する。
【解決手段】 移動部がストッパと接触する固定位置に移動部を固定する固定装置は、モータとギアとを用いて移動部を移動させる駆動部と、モータ電流を制御するモータ制御部と、固定位置を含む移動制限範囲内に移動部が位置するか否かを検知可能な位置センサと、を備えている。モータ制御部は、移動部が移動制限範囲内に無い場合には、設定停止電流以下に制限した状態でのモータ電流の供給を、移動部がストッパに接触して停止した後まで続けることによって、移動部を固定位置に固定する。また、モータ制御部は、移動部が移動制限範囲内に位置する場合には、設定停止電流よりも大きな開始電流をモータに供給することによって、固定位置から離れる方向への移動部の移動を開始させる。
(もっと読む)
アクチュエータ装置
【課題】 一対のリニア駆動式駆動部をその同期を図りながら作動させ、これにより被駆動部材を駆動させる。
【解決手段】 アクチュエータ装置10では、制御回路部66が、各回転数検出器17からのパルス数に基づいて一対の駆動部14L,14Rの各駆動モータ16のうち回転数の高い方の駆動モータ16を判別すると共に、各回転数検出器17からのパルス数が等しくなるように回転数の高い方の駆動モータ16を回転数の低い方の駆動モータ16に同期させる。そして、アクチュエータ装置10において、別体に形成された一対の駆動部14L,14Rのそれぞれは、駆動モータ16の回転駆動力を回転直動変換機構18により直動駆動力に変換して出力軸20を進退動させるリニア駆動式の構成となっている。
(もっと読む)
DCブラシレスモータの制御装置
【課題】モータが外力によって回転している場合に、ロータを所定位置に確実に停止させることができるDCブラシレスモータの制御手段を提供すること。
【解決手段】DCブラシレスモータ1と1つの磁極位置センサ2と、前記DCブラシレスモータ1に供給するインバータ回路3と、スイッチング素子を駆動する駆動手段5と、前記磁極位置センサ2の信号からモータ回転数および減速度の演算を行う演算手段6と、演算手段6の結果に基づき前記駆動手段5が出力するPWM信号のデューティを制御するデューティ制御手段7とを備え、前記DCブラシレスモータ1の起動前にファンが外力により回転している場合に前記磁極位置センサの出力信号に同期して、2つのパターンの直流励磁信号を切り換え、前記直流励磁信号を減速度に応じてデューティを制御することにより、モータの個体差や特性が変化した場合でも確実に制動、停止させることが可能となる。
(もっと読む)
乗員保護装置
【課題】 車両の衝突時に、乗員への衝撃を緩和する。
【解決手段】 シート1は、フレーム13の下にシートを支え、かつ左右方向、前後方向にシートを駆動する、シート左右方向駆動機構14Bとシート前後方向駆動機構14Aを備えている。シート前後方向(左右方向)駆動機構は、バネ9A(9B)とDCモータ4A(4B)、ピニオンギア8A(8B)、ラックレール3A(3B)を有し、バネ力とDCモータの回転により前後方向(左右方向)にシートを駆動可能である。コントロールユニット21は、衝突センサ32からの信号により衝突を検出したとき、バネ9A(9B)を解放して、後方(左右方向内方)へシートを移動させ、さらにモータ駆動回路5A(5B)を制御し、シート減速度を所定のパターンに合うように、コンデンサ6に蓄えられた電力によりDCモータを駆動させる。
(もっと読む)
遮断型のリミットスイッチを備えたアクチュエータ
アクチュエータ(30)は、ギアトレーンを介して出力装置に接続されたシャフトを回転させるモータと、出力装置に接続され、出力装置の移動に一致する経路中を移動可能に構成された遮断羽根と、出力装置の移動の限界に一致する位置に、遮断羽根の経路に沿って互いに間隔をあけられた、少なくとも二つの遮断スイッチ(34,36)、例えば光遮断スイッチと、を有する。コントローラは、コマンド信号に応じてモータを駆動し、出力装置が移動の限界に達したか又は近づいていることを示す、遮断スイッチ(32,34)の一つからの指示に応じて、モータを停止させる。アクチュエータは、ロータリーアクチュエータ又はリニアアクチュエータでも良いし、特にエビオニクスの応用に適していても良い。  (もっと読む)
(もっと読む)
1 - 20 / 20
[ Back to top ]