
Fターム[5H540BB01]の内容
Fターム[5H540BB01]の下位に属するFターム
Fターム[5H540BB01]に分類される特許
1 - 20 / 40
リニアモータ制御装置
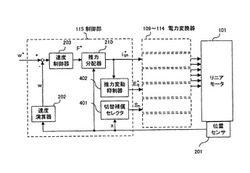
【課題】電力変換器の切替え時の出力電圧振幅制限に伴う推力リプルを低減させることができるリニアモータ制御装置を提供する。
【解決手段】固定子巻線が界磁可動子の移動方向に複数区分されたリニアモータを、位置センサが検出する界磁可動子位置に基づいて区分毎に備えられた電力変換器を切替えて、界磁可動子を移動させるように固定子巻線に電力を供給するリニアモータ制御装置であって、電力変換器を切替える際、電力変換器の出力電圧制限または出力電流応答遅れを防止するように構成した。
(もっと読む)
モータ駆動装置

【課題】磁極位置検出手段の情報を簡単に確認する方法を提供する。
【解決手段】磁極位置情報を出力する磁極位置検出手段と、磁極位置情報から磁極位置表示データ情報を出力する表示データ作成手段と、前記磁極位置表示データ情報を表示するデータ表示手段とを有することを特徴としたモータ駆動装置とする。
(もっと読む)
リニアモータの駆動システム及び制御方法
【課題】固定子が分散配置されたリニアモータにおいて、可動子の不必要な速度変動を防止してスムーズに駆動させながら位置制御を行う。
【解決手段】駆動装置は、制御装置からの位置指令と、対応する固定子の位置センサにより検出された位置と、の偏差を算出し、当該偏差と位置ゲインとに基づいて可動子の速度制御に用いられる速度指令を算出する位置制御を行い、対応する固定子の位置センサにより位置が検出される範囲のうち、磁石部の少なくとも一部の磁石が当該固定子のコイルと対向する制御範囲に可動子が進入してきたときに、可動子の運動速度を速度指令として偏差を逆算し、当該偏差と位置指令から可動子の位置を逆算し、算出された位置を、制御範囲に進入してきたときの可動子の位置として、位置センサにより検出された位置を補正して位置制御を行う。
(もっと読む)
モータ駆動装置
【課題】コストの低減を図りつつ、コイル間の特性のバラツキに起因する特性の劣化を抑制する。
【解決手段】入力される駆動指令信号S1及び設定された駆動特性値に基づいて駆動信号を出力するフィルタ11と、フィルタ11からの駆動信号に応じてコイル2に供給する電流を出力するPWM駆動部12と、複数のコイル2の特性毎に予め求められたパラメータが記憶されたメモリ14と、入力される特性選択信号S2に対応するパラメータに基づいて、フィルタ11が用いる駆動特性値を変更して設定する特性設定部13とを備えている。
(もっと読む)
多自由度アクチュエータ
【課題】本発明は、小型でありながら推力、浮上力、可変浮上力が大きく、Z方向の浮上とXY方向の推進、さらにθX、θY、θZ方向の微動を行う多自由度アクチュエータを提供する。
【解決手段】永久磁石114は極数P(Pは2以上の偶数)極性を逆にX方向に配置し、Z方向駆動用コイル104は永久磁石114の磁極と対向する位置にP個、永久磁石114とZ方向駆動用コイル104はY方向にn列(nは2以上の整数)配置し、X方向駆動用コイル105のコイル辺がZ方向駆動用コイル104の中心と一致する位置にX方向駆動用コイル105をP/2個配置し、Z方向駆動用コイル104のコイルエンドを折り曲げ、空心にX方向駆動用コイル105のコイル辺を埋め込むように配置する。
(もっと読む)
推力リップル解析方法及び補正方法
【課題】モータで生ずる推力リップルの解析及び補正を精確に行うことができる推力リップル解析方法及び補正方法を提供する。
【解決手段】平面モータ1は固定子としての格子プラテン10と可動子としてのスライダ部20とを備えており、モータ制御装置30の制御によってスライダ部20が格子プラテン10上で移動されるとともに位置決めされる。平面モータ1で生ずる推力リップルを解析する場合には、格子プラテン10に対するスライダ部20の位置を変えながらスライダ部20を微小振動させたときの平面モータ1の応答特性を測定し、格子プラテン10に対するスライダ部20の位置に応じた平面モータ1の応答特性の変化から推力リップルを求める。
(もっと読む)
超電導リニアモータの制御装置、それを用いた露光装置及びデバイスの製造方法
【課題】超電導性に起因した外乱力を抑え、高精度な制御が可能となる超電導リニアモータの制御装置を提供する。
【解決手段】超電導線を用いたコイル204と、永久磁石を用いた磁石ユニット203a、203bとを有する超電導リニアモータと、コイル204に電流を供給する電流ドライバ107と、磁石ユニットの駆動指令dを受信し、電流ドライバ107に駆動指令dに基づく指令値を送信して磁石ユニット203a、203bの位置を制御する位置制御系101と、を有する超電導リニアモータの制御装置において、更に、コイルの温度情報とコイルと磁石ユニットとの相対位置情報とを引数にした制御指令テーブル105を有する変換指令算出部104を備え、変換指令算出部104は、制御指令テーブル105を参照して、超電導性に起因する外乱力を低減するように制御指令を変換し、制御指令を位置制御系101に送信する。
(もっと読む)
位置決め装置
【課題】安価で簡易な構成によりスライダの位置検出を安定して行うことができるとともに、設計の自由度の高い位置決め装置を実現する。
【解決手段】互いに直交するX軸およびY軸の少なくとも1軸方向に位置制御されるスライダ1と、このスライダ1と対向する面に磁極の歯が形成されてスライダ1と平面モータを構成するプラテン10とを備えた位置決め装置において、
スライダ1の1軸方向の位置を検出するレゾルバ2と、
このレゾルバ2のスライダ1の進行方向側に隣接して配置されたレゾルバ2a,2bと、
このレゾルバ2a,2bの出力に基づいてレゾルバ2の出力を補正する補正部と、
この補正部からの出力に基づいてスライダ1の位置を算出する位置算出部と、
を備えたことを特徴とする。
(もっと読む)
リニアモータ用ブレーキ回路
【課題】 スイッチング動作時の消費電力を少なくしかつリニアモータの制動力を外部から制御することが可能なリニアモータ用ブレーキ回路を提供する。
【解決手段】 リニアモータの負荷に並列に接続された3相全波整流回路20と、この整流回路から出力されるブレーキ電流を制限する電流制限抵抗3(R11〜R14)と、電流制限抵抗R11、R13に接続された第1のトランジスタM0、M2とこれらのトランジスタに制御信号を出力する制御信号発生回路6a、6bを有する定電流回路4a、4bと、各定電流回路に流れる電流を2段階に調整する第2のトランジスタM11、M14を有するスイッチ回路5a、5bと、これらのトランジスタをオンオフさせるベース駆動回路7を有する。
(もっと読む)
磁気浮上制御装置
【課題】 任意の位置でゼロパワー制御が可能な磁気浮上制御装置を提供する。
【解決手段】 可動部,浮上アクチュエータ,位置センサ,およびコントローラとを備えた磁気浮上制御装置において、前記浮上アクチュエータは永久磁石23による吸引力または反発力を可変とした永久磁石磁力可変モータであり、該永久磁石磁力可変モータは永久磁石23による吸引力または反発力を変化させるためのアクチュエータである磁力操作モータ15を備え、コントローラ100は磁力操作モータ15の可動子位置を制御する磁力操作モータ制御器195を備え、磁力操作モータ15の可動子位置を操作することによって永久磁石磁力可変モータの発生する推力を操作する。
(もっと読む)
振動素子
【課題】装置の構成の複雑化を抑制するとともに、可動部の振動状態の検出期間を拡大することが可能な振動素子を提供する。
【解決手段】この電磁駆動式ミラー(振動素子)100は、所定の共振周波数およびその近傍で振動する可動部11と、パルス電流Ipを周期的に供給することにより可動部11を振動させるパルス電流供給部32と、可動部11の振動状態を検出する逆起電力検出部33とを備え、パルス電流供給部32は、少なくとも起動時には、可動部11の共振周波数と略同じ第1周波数f1でパルス電流Ipを供給するとともに、可動部11の振動状態の検出時には、第1周波数f1よりも小さい第2周波数f2でパルス電流Ipを周期的に供給するように構成されている。
(もっと読む)
平面パルスモータ、露光装置およびデバイス製造方法
【課題】平面パルスモータにおける可動子の回転制御に有用な技術を提供する。
【解決手段】平面パルスモータは、可動子4および固定子12を有する。可動子4は、磁性体を含んで構成され、固定子12に対向する面に複数の凸部を有する。固定子12は、可動子4を駆動するための複数の磁気発生ユニット6a、6bを有する。平面パルスモータの制御部は、複数の磁気発生ユニット6a、6bのうち、可動子12の駆動方向に沿った可動子4の中心線Cを跨がず、かつ、可動子4が存在する領域からはみ出していない磁気発生ユニットから選択される磁気発生ユニットを動作させることによって可動子4の回転を制御する。
(もっと読む)
リニア振動モータの駆動制御方法
【課題】低コスト、且つ、効率よく巻線へ電流を流す駆動制御を行う。
【解決手段】振幅検出部7が、非通電期間中に起電圧のサンプリングを行い、その中での最大点により振幅を算出する。これにより、サンプリング時間が多少ずれても十分に振幅を検出でき、次の巻線1への通電タイミングまでの時間に余裕がある。このため効率の良いタイミングで巻線へ通電することができ、モータ駆動の効率化、省電力化となる。
(もっと読む)
テーブルの制御方法およびその装置
【課題】ガントリータイプのテーブルにおいて、塗布速度への立ち上げが指令速度に対して遅れるために有効な塗布面を得るには塗布速度の高速化や除外距離(塗布を始めてから塗布膜厚の変動率が要求仕様に収まるまでの走行距離)の短縮も望まれており、速度制御への要求内容は厳しいものとなっているため、これに対応する。
【解決手段】クロスカップリング制御とゲイン切替制御の方式において、塗布速度到達時のオーバーシュートをおさえ、それ以降は速度ムラをおさえるために、中心速度コントローラのゲイン切替のみを行っていたが、左右偏差コントロールのゲインを加速時に大きくして加速終了後に小さくした。
(もっと読む)
電磁アクチュエータ
【課題】電磁アクチュエータの構造が複雑になるのを抑制しながら、可動部の振動の周波数を所定の周波数まで効率よく上昇させることが可能な電磁アクチュエータを提供する。
【解決手段】この電磁アクチュエータ100は、電磁石12を含む固定部1と、固定部1に対向するように配置され、永久磁石21を含む可動部2とを備え、電磁石12に交流の電流を印加することにより、可動部2は、少なくとも2つ以上の位置を周期的に繰り返し移動することにより振動し、交流の電流の周波数は、所定期間一定の周波数を維持しながら段階的に上昇するように構成されている。
(もっと読む)
固定子が分散配置された永久磁石型リニア同期モータの制御方法
【課題】エア浮上搬送装置の駆動用として、一次側固定子が分散配置された永久磁石型のリニア同期モータを使う場合に、固定子の進行磁界と可動子磁界の同期を取る必要がある。従来の光学式センサを用いた同期制御方法は、走行軌道に対する走行台車の拘束度が低いエア浮上搬送の場合には、信頼性の低下につながる恐れがあった。
【解決手段】本発明では、一対のホール素子センサの一方を固定子の内部に他方を外部に設置し、それらの間隔を固定子内に形成される進行磁界の波長と等しくすることにより、可動子が固定子に進入する前に前記の外部センサを通過する時のこれらの一対のセンサの出力から、固定子の進行磁界と可動子磁界の同期情報を簡単に且つ高い信頼性をもって、求めることが出来る。
(もっと読む)
作業用搬送装置
【課題】リニアブロックの数を増減させることにより走行路を容易に変更可能で且つ走行体の走行駆動制御手段の変更を抑制できる作業用搬送装置を提供する。
【解決手段】複数のリニアブロック1と、ガイドレール上を摺動案内される複数の走行体と、ガイドレール延設方向に並列配置された複数の固定電磁石及び走行体側に設けられた可動永久磁石等により構成されるリニアモータと、走行体を走行駆動させる制御部とを備え、単一の走行路3に沿って走行体により搬送される被処理物の流れ作業を行うことが可能な作業用搬送装置において、走行路3を複数のポイントPに区画し、走行体がどのポイントPにいるかを検出する位置検出手段を設け、制御部が走行体の現ポイントPでの作業が完了したこと又は作業が不必要であることを判断するとともに次ポイントPに他の走行体がいないことを検出することにより該走行体を次ポイントPに変位させる。
(もっと読む)
リニアモータ駆動システムとその制御方法。
【課題】 高価な絶対値エンコーダやホールセンサを使用せず、短時間で磁極位置を同定し原点サーチのできるリニアモータ駆動システムとその制御方法を提供する。
【解決手段】 リニアモータ駆動システムにおいて、モータ制御装置(7)は、電源投入時に固定子巻線全てに通電して磁極位置を同定する磁極位置同定部(9)と、同定時の磁極位置を同定時磁極位置として記憶する同定時磁極位置記憶部(10)と、原点サーチ指令を生成する原点サーチ指令生成部(13)と、原点サーチ指令により固定子巻線全てに通電して原点をサーチするモータ駆動部(8)と、原点を見つけたら原点位置を記憶する原点位置記憶部(11)と、原点位置と同定時磁極位置とから可動子の位置を演算し、通電すべき固定子巻線を選択して巻線選択信号を生成する巻線選択部(12)と、を備え、
原点サーチ以後は、推力発生に有効な固定子巻線を選択して通電するようにした。
(もっと読む)
リニア誘導機の定数測定装置
【課題】二次導体を拘束することなく一次回路から見て停止状態を実現して短時間に電気的定数の測定が可能になるリニア誘導機の定数測定装置を得ること。
【解決手段】定数測定装置6aは、一次回路3と二次導体4とバックヨーク5とを備えたリニア誘導機1aの状態を、一次回路3に所定の給電周波数の元で3相のうち少なくとも2相は逆相の関係にある交流電圧を供給して二次導体4が一次回路3から観察して停止している状態に制御する制御回路と、一次回路3を流れる電流を検出する電流検出器7と、前記給電周波数と供給電圧と電流検出器7が検出した電流値との関係から、少なくともリニア誘導機1aの二次抵抗と一次インダクタンスと相互インダクタンスのいずれかひとつを算出する定数演算器とを備えている。
(もっと読む)
リニアアクチュエータ
【課題】 ヨーイング角度を規定値内に抑えた状態で、姿勢制御に要する駆動電流値を最小とすることができるリニアアクチュエータを実現する。
【解決手段】 夫々に位置検出手段を備えた一対のリニアモータを所定距離を隔てて平行に配置し、前記リニアモータのスライダ間をアーム部材で結合したリニアアクチュエータにおいて、
前記一対の位置検出手段の出力の和に基づき、前記スライダ間の中点位置信号を算出する中点位置検出手段と、
前記一対の位置検出手段の出力の差に基づき、前記スライダ間の姿勢位置信号を算出する姿勢位置検出手段と、
前記中点位置信号と位置指令信号との偏差に基づく推力指令により前記スライダを駆動する駆動電流値を操作する中点位置制御部と、
制御された中点位置における最適な姿勢目標値信号を生成する姿勢目標値生成部と、
前記姿勢位置信号と前記姿勢目標値信号との偏差を演算した補正信号を利用して前記推力指令を補正する姿勢制御部と、
を備える。
(もっと読む)
1 - 20 / 40
[ Back to top ]