
Fターム[5H540FC10]の内容
Fターム[5H540FC10]に分類される特許
1 - 20 / 37
電気負荷装置の診断装置
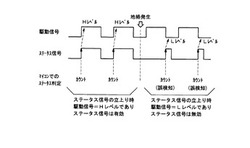
【課題】 電気負荷装置(ソレノイド)の地絡等の故障を確実に診断する。
【解決手段】 制御装置(マイコン)から駆動回路への駆動信号と、駆動回路の出力状態に応じたステータス信号とを比較する。具体的には、ステータス信号の立ち上がり時に、駆動信号のレベルを判定し、例えばHレベルで整合性があれば、ステータス信号は有効と判断し、ステータス信号のカウントにより正常と診断する。ソレノイドの地絡故障を生じた場合は、駆動回路の出力が固定され、ステータス信号は発生しなくなる。また、仮に擬似的信号を発生したとしても、その立ち上がり時の駆動信号のレベルを判定し、Hレベルでなければ、ステータス信号は無効と判定する。それゆえ、誤診断を防止できる。
(もっと読む)
検知方法、露光方法、及びデバイス製造方法

【課題】固定子と可動子との間の距離の変化を検知可能な検知方法、この検知方法による検知結果に基づいて基板にパターンを転写露光する露光方法、及びこの露光方法を利用してデバイスを製造するデバイス製造方法を提供すること。
【解決手段】検知方法は、第1方向に沿って配列された複数の固定子に対して可動子を第1方向に沿って第1の速度で等速移動させ、等速移動させたときの可動子の第1方向における第1の推力の大きさを検出し、複数の固定子に対して可動子を第1方向に沿って第1の速度とは異なる第2の速度で等速移動させ、等速移動させたときの可動子の第1方向における第2の推力の大きさを検出し、第1及び第2の速度と、第1及び第2の推力の大きさとを用いて、固定子と可動子との間に作用するコギング力の大きさを算出し、算出ステップによって算出されたコギング力の大きさに基づいて、固定子と可動子との間の距離の変化を検知する。
(もっと読む)
洗濯機の制振装置
【課題】洗濯槽重量のアンバランスに応じた最適な制振制御を、リニアモータのベクトル
制御を用いることでリアルタイムに行うことができる制振装置を提供する。
【解決手段】洗濯槽と筐体の間に配置されたリニアモータおよび弾性体と、前記リニアモ
ータの巻線に通電される電流を検出し、電流信号を出力する電流検出手段と、前記リニア
モータの可動子の相対位置を検出して前記可動子の移動距離を演算する位置演算部と、前
記洗濯槽または前記筐体の加速度を検出し、加速度信号を出力する加速度センサと、前記
移動距離、前記加速度信号および前記弾性体の弾性定数に基づき、加振力信号を演算する
加振力演算部と、前記加振力信号と目標振動値との差分に基づき、指令q軸電流値を出力
するトルク制御部と、前記電流信号と、前記指令q軸電流値に基づいて、前記巻線に対す
る通電を制御する通電制御手段とを有することを特徴としている。
(もっと読む)
リニア振動モータの駆動制御回路
【課題】リニア振動モータがどのような状態であっても、その固有振動数にできるだけ近い周波数で駆動する。
【解決手段】駆動信号生成部10は、コイルL1に正電流と負電流とを非通電期間を挟んで交互に流すための駆動信号を生成する。駆動部20は、駆動信号生成部10により生成された駆動信号に応じた駆動電流を生成し、コイルL1に供給する。誘起電圧検出部30は、非通電期間において、コイルL1に発生する誘起電圧を検出する。ゼロクロス検出部40は、誘起電圧検出部30により検出された誘起電圧のゼロクロスを検出する。駆動信号生成部10は、ゼロクロスの検出位置からリニア振動モータ200の固有振動数を推定し、駆動信号の周波数を、当該固有振動数に近づける。
(もっと読む)
制振制御システム及び電気機器
【課題】急峻に変化する振動に対する応答性を向上させ、その上で電力回生することができる制振制御システム,及びその制振制御システムを提供する。
【解決手段】洗濯機21の基部12と水槽14との間に、リニアモータ1とスプリング15とを組み合わせてなる電磁式サスペンション11を配置しリニアモータ1の固定子7側に位置センサ8を配置する。制御装置41は、位置演算部55により位置センサ8より出力される位置信号に基づいて位置θeを検出し、微分器57により速度vを検出すると、位置θe及び速度v及び基部12に取り付けられた加速度センサ16より出力される加速度信号aとモータ電流Ia,Ib,Icとに基づきリニアモータ1をベクトル制御して、洗濯運転時に水槽14について生じる振動を目標値まで抑制し、かつ、そのときに得られる最大の電力を回生する。
(もっと読む)
リニア型永久磁石同期モータの制御装置
【課題】モータの一方向のみの移動により、初期磁極位置を高精度かつ少ない演算量で推定し、制御装置の演算や構成を簡略化する。
【解決手段】位相角指令演算手段17は、摩擦脱出モードにおいて位相角指令値を所定値に固定する機能と、移動速度が制限値以上になった時に位相角指令値の増加割合を低減させる機能等を備える。電流指令演算手段16及びd軸電流指令手段8は、摩擦脱出モードにおいて電流指令値をランプ関数的に増加させる機能、移動検出時に電流指令値を第1の設定値まで低下させる機能、磁極位置検出モードにおいて電流指令値をランプ関数的に増加させる機能、移動速度が制限値に達した時に電流指令値を減少させて移動速度を低下させる機能、停止するまで電流指令値をランプ関数的に増加させて磁極位置を印加電圧の位置に一致させ、磁極位置を検出する機能等を備える。
(もっと読む)
駆動制御装置、駆動制御方法および撮像装置
【課題】簡素な回路により移動部材を駆動するコイルから発生する磁気成分を相殺して、安定した移動部材の駆動を制御する。
【解決手段】駆動制御装置100は、移動部材14を駆動するための移動部材駆動部106と、移動部材14の制御目標位置を演算する目標位置演算部102と、移動部材駆動部106から発生する磁気成分を検出する磁気成分検出部108と、磁気成分検出部108により検出された磁気成分のうち、所定の磁気成分を相殺する磁気成分相殺部110と、磁気成分相殺部110により相殺された所定の磁気成分に基づいて、移動部材14が目標位置演算部102により演算された制御目標位置へ追従するように、移動部材14の駆動を制御する制御部104と、を備える。
(もっと読む)
三相モータの駆動装置、及びこれを備えている駆動制御装置
【課題】三相モータの各相に供給する電流のオフセット電流を抑える。
【解決手段】オフセット電流検知モードの際、各相駆動部11u,11v,11wは、三相モータ30の各相31u,31v,31wを順次、電流指令値0に応じて電流で単独駆動させる。この際、三相モータ30の中性点Nの電流値は、中性点電流検知器27で検知され、各相のオフセット電流値として、オフセット電流記憶部21に記憶される。通常運転モードの際には、このオフセット電流記憶部21に記憶された各相のオフセット電流値が、各相駆動部11u,11v,11wの補正器19に送られ、この補正器19で、電流指令値が補正される。
(もっと読む)
磁気浮上制御装置
【課題】 任意の位置でゼロパワー制御が可能な磁気浮上制御装置を提供する。
【解決手段】 可動部,浮上アクチュエータ,位置センサ,およびコントローラとを備えた磁気浮上制御装置において、前記浮上アクチュエータは永久磁石23による吸引力または反発力を可変とした永久磁石磁力可変モータであり、該永久磁石磁力可変モータは永久磁石23による吸引力または反発力を変化させるためのアクチュエータである磁力操作モータ15を備え、コントローラ100は磁力操作モータ15の可動子位置を制御する磁力操作モータ制御器195を備え、磁力操作モータ15の可動子位置を操作することによって永久磁石磁力可変モータの発生する推力を操作する。
(もっと読む)
モータ用ドライブ回路
【課題】 ヒューズの断線を確実に検出することができるモータ用ドライブ回路を提供する。
【解決手段】 断線検出回路5は、直流電源8と、この直流電源8に接続された発光ダイオード91と検出信号を制御回路7に出力するフォトトランジスタ92からなるフォトカプラ9と、発光ダイオード91の出力端子に接続された抵抗10とカソード側が給電ライン3に接続されたダイオード11とを有する。断線検出回路5は、電源回路とは別の直流電源で作動するように構成されているので、過電流でヒューズが溶断した場合にのみ断線検出信号を出力することができる。
(もっと読む)
リニアモータシステム
【課題】リニアモータの推力定数誤差(バラツキ)を簡便に自動補正し、低減できるようにする。
【解決手段】リニアモータと、そのリニアモータのコイルに電流を供給する電流アンプとを備えるリニアモータシステムにおいて、リニアモータに抵抗器28を取り付け、その抵抗器28はリニアモータの推力定数誤差に対応する抵抗値を有するものとする。電流アンプ40には抵抗器28の抵抗値を読み取る手段と、その読み取った抵抗値から推力定数誤差を演算し、その演算した推力定数誤差に基づき、電流を調整する手段(演算回路41)を設ける。
(もっと読む)
作業用搬送装置
【課題】リニアブロックの数を増減させることにより走行路を容易に変更可能で且つ走行体の走行駆動制御手段の変更を抑制できる作業用搬送装置を提供する。
【解決手段】複数のリニアブロック1と、ガイドレール上を摺動案内される複数の走行体と、ガイドレール延設方向に並列配置された複数の固定電磁石及び走行体側に設けられた可動永久磁石等により構成されるリニアモータと、走行体を走行駆動させる制御部とを備え、単一の走行路3に沿って走行体により搬送される被処理物の流れ作業を行うことが可能な作業用搬送装置において、走行路3を複数のポイントPに区画し、走行体がどのポイントPにいるかを検出する位置検出手段を設け、制御部が走行体の現ポイントPでの作業が完了したこと又は作業が不必要であることを判断するとともに次ポイントPに他の走行体がいないことを検出することにより該走行体を次ポイントPに変位させる。
(もっと読む)
運動体に作用する動推力の測定装置及び測定方法、電磁力の測定装置
【課題】リニアアクチュエータの可動子をはじめとする運動体に作用する動推力を正確に測定することができる力の測定方法を提供する。
【解決手段】試験用リニアアクチュエータ1の可動子3と負荷用リニアアクチュエータ2の可動子4との間に力センサ5を装着する。試験用リニアアクチュエータ1の可動子3の加速度を加速度センサ6によって測定する。試験用リニアアクチュエータ1の可動子3の変位を変位センサ7によって測定する。そして、力センサ5の出力と加速度センサ6の出力とに基づいて、または、力センサ5の出力と加速度センサの出力と変位センサ7の出力とに基づいて試験用リニアアクチュエータ1が発生する動推力(電磁力)を推定する。
(もっと読む)
位置決め装置、露光装置及びデバイス製造方法
【課題】 テーブルを駆動するアクチュエータへの電流供給路の断線の検知を、簡単な構成でかつ確実に行うことができる位置決め装置を提供すること。
【解決手段】 ステージ1を駆動するアクチュエータ2と、アクチュエータ2に電流を供給するドライバ3との間に電流供給路42が接続され、この電流供給路42に途中には電流検出器8が設けられる。電流供給路42は複数の経路を有し、電流検出器8は、上記複数の経路のうちの少なくとも1つの経路の電流に基づいて電流供給路42の断線を検知する。
(もっと読む)
特に工作機械の、傾斜した駆動軸の特性量の確定方法、並びにその適切な使用方法、対応する装置及びその使用方法
【課題】特に機械の傾斜した駆動軸の特性量を確定するための方法において従来の問題点を解決し得る方法を提供する。
【解決手段】機械の駆動軸の少なくとも1つの特性量K1〜K8を確定するための方法であって、軸は回転式の駆動ユニットないし直線式の駆動ユニットを用いて駆動され、軸のあらかじめ与えられた変位経路に沿って駆動ユニットに作用する順方向及び逆方向のトルクMF、MRないしそれに対応する力が測定され、エネルギーを保存するモーメントK2〜K4、K8ないしエネルギーを保存する力及び摩擦に依存するモーメントK1、K5〜K7ないし摩擦に依存する力の少なくともいずれかが、所属のトルクないし力の値の計算による重畳によって、方向に依存しない少なくとも1つの特性量K1〜K8として確定される。
(もっと読む)
リニア圧縮装置およびその制御方法
【課題】 ピストンの位置検出器が不要で、演算処理を行うプロセッサの負担が小さく、電気ノイズの影響を受け難く、精度の高いピストン位置制御のできるコストの安いリニア圧縮装置および位置検出器を用いず、電気ノイズの影響を受け難く、演算処理を行うプロセッサの負担が小さく、精度の高い位置制御が出来るリニア圧縮装置の制御方法を提供すること。
【解決手段】 リニアモータを有するリニア圧縮機2と、リニアモータに電力を供給する電源31と、電源部3を制御する制御部4とを備えるリニア圧縮装置であって、制御部の電圧測定演算と、電流測定演算と、変位測定演算の各ステップの3つ以上の異なる位相角で測定した電圧、電流、変位から各振幅と各位相角を演算し、該演算値からリニアモータのコイルのインダクタンスと逆起電力係数を求め、リニア圧縮装置を制御する。
(もっと読む)
リニアパルスモータ
【課題】加速度を上げても振動が発生せず、なめらかに位置指令値に追従できるリニアパルスモータを実現する。
【解決手段】電流指令値と、位置指令値より変換される電気角指令値に基づいてスライダをマイクロステップ駆動するリニアパルスモータにおいて、前記スライダに与えられる加速度信号と前記スライダの質量に基づいて前記スライダの必要推力量を算出する必要推力算出手段と、算出された前記必要推力量と前記電流指令値に基づいて電気角フィードフォワード量を算出する電気角フィードフォワード量算出手段と、算出された前記電気角フィードフォワード量に応じて前記電気角指令値を補正する補正手段と、を備える。
(もっと読む)
リニアモータ駆動装置
【課題】停電時等に確実にダイナミックブレーキをかけてリニアモータの破損を防止する。
【解決手段】励磁切り換え型MM方式のリニアモータ2を駆動するリニアモータ駆動回路において、駆動回路からの電力の供給が不十分になったとき、モータコイル9同士を短絡させてダイナミックブレーキを働かせる第2のスイッチ6,7,8を、モータコイル9の励磁を切り換える第1のスイッチの出力側に設けた。
(もっと読む)
リニア誘導機の定数測定装置
【課題】二次導体を拘束することなく一次回路から見て停止状態を実現して短時間に電気的定数の測定が可能になるリニア誘導機の定数測定装置を得ること。
【解決手段】定数測定装置6aは、一次回路3と二次導体4とバックヨーク5とを備えたリニア誘導機1aの状態を、一次回路3に所定の給電周波数の元で3相のうち少なくとも2相は逆相の関係にある交流電圧を供給して二次導体4が一次回路3から観察して停止している状態に制御する制御回路と、一次回路3を流れる電流を検出する電流検出器7と、前記給電周波数と供給電圧と電流検出器7が検出した電流値との関係から、少なくともリニア誘導機1aの二次抵抗と一次インダクタンスと相互インダクタンスのいずれかひとつを算出する定数演算器とを備えている。
(もっと読む)
平面モータ
【課題】推力発生時におけるスライダの傾きを防止できる平面モータを提供する。
【解決手段】コアCX1−1,CX1−2,CX2−1,CX2−2によりスライダ3にX方向への推力が与えられている場合には、コアCY1−1,CY1−2,CY2−1,CY2−2によりスライダ3にZ軸方向(垂直方向)への推力が与えられることでトルクが打ち消される。コアCY1−1,CY1−2,CY2−1,CY2−2によりスライダ3にY方向への推力が与えられている場合には、コアCX1−1,CX1−2,CX2−1,CX2−2によりスライダ3にZ軸方向(垂直方向)への推力が与えられることでトルクが打ち消される。
(もっと読む)
1 - 20 / 37
[ Back to top ]