
Fターム[5H560DC05]の内容
無整流子電動機の制御 (40,007) | その他の検出 (3,633) | 温度、熱検出 (226)
Fターム[5H560DC05]に分類される特許
1 - 20 / 226
モータ制御装置
モータの制御装置
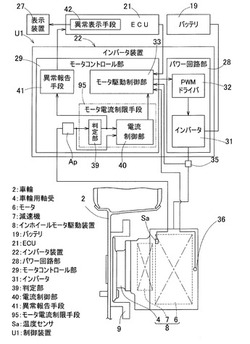
【課題】 車両の運転を急激に妨げることなく、モータを温度管理し、適切な対処が迅速に行えるモータの制御装置を提供する。
【解決手段】 モータ6のモータコイルに、このモータコイルの温度Tcを検出する温度センサSaを設ける。温度センサSaで検出される温度Tcに対し複数の閾値が設定され、各閾値で区分される温度領域毎に、互いに異なる電流制限条件が設定され、検出される温度Tcの含まれる前記温度領域の前記電流制限条件に応じてモータ6の電流値を制限するモータ電流制限手段95を設けた。
(もっと読む)
永久磁石同期電動機のd軸電流を制御するモータ制御装置

【課題】過熱による永久磁石同期電動機の永久磁石の熱減磁が生じる事態を回避することができるモータ制御装置を提供する。
【解決手段】q軸電流及びd軸電流検出部11は、q軸電流Iq及びd軸電流Idを、U相電流IU、V相電流IV及びW相電流IW及びロータ52の回転角度θに基づいて検出する。q軸電流指令値生成部12は、q軸電流指令値Iqcomを速度指令値ωcomに基づいて生成する。d軸電流指令値生成部13は、永久磁石同期電動機5の定常時における永久磁石54a,54b,54c,54dの温度上昇量が最小になるd軸電流指令値Idcomを、ロータ52の回転速度ωに基づいて生成する。
(もっと読む)
電気機械のロータ角度を推定する方法およびシステム
【課題】電気機械のロータ角度またはロータ位置を精度高く推定する。
【解決手段】永久磁石電気機械117に結合されたエンコーダ115から、位置サンプルが格納される。データ・プロセッサが、連続する位置サンプル間における第1位置変化と、連続する第1位置変化における第2変化とを判定する。データ・プロセッサは、各第1位置変化が全体的に増大しているか、減少しているか、または一定であるか判定を行う。第1位置変化が全体的に増大しているかまたは減少しているかに基づいて、格納された各位置サンプルに補正位置係数が適用される。データ・プロセッサは、位置サンプルの内特定の1つと、それぞれの時点に対応する位置サンプルの特定の1つと関連した、対応する第1位置変化とに基づいて、電気機械の最終ロータ角度を推定する。
(もっと読む)
モータ電流検出装置、モータ制御装置、及び電動工具
【課題】バッテリからブラシレスモータに流れる平均電流及び瞬間電流をそれぞれ簡素な構成で適切に検出できるようにする
【解決手段】バッテリからブラシレスモータに流れる電流を検出する1つの電流検出抵抗R0と、この電流検出抵抗R0により検出された電流から、第1カットオフ周波数fc1以下の周波数帯域の電流成分(平均電流)を抽出する第1フィルタ手段42と、電流検出抵抗R0により検出された電流から、第1カットオフ周波数fc1よりも高い第2カットオフ周波数fc2以下の周波数帯域の電流成分(瞬間電流)を抽出する第2フィルタ手段43と、を備えている。このような簡素な構成ながら、高効率・高出力のブラシレスモータにおいて回路保護のために検出すべき平均電流及び瞬間電流を適切に検出することができる。
(もっと読む)
電動車両の制御装置
【課題】複数のモータが同一の駆動軸にトルクを付加する電動車両において、必要なトータルトルクに対して、それぞれのモータのトルク分担を少ない計算負荷で適切に決定することが可能な技術を提供する。
【解決手段】本明細書は、同一の駆動軸にトルクを付加する2以上のモータを備える電動車両の制御装置を開示する。それぞれのモータは、制御方式が切替え可能である。その制御装置は、必要なトータルトルクから、それぞれのモータのトルク分担を計算する際に、それぞれのモータの制御方式の組み合わせに応じて、トルク分担の計算に用いるトルクマップを選択し、必要なトータルトルクと、選択されたトルクマップを用いて、それぞれのモータのトルク分担を計算する。
(もっと読む)
ブラシレスモータの駆動装置
【課題】ブラシレスモータの過渡状態において脱調が起こり難くする。
【解決手段】ブラシレスモータが第1の回転速度N1未満で回転駆動する低速運転領域では、非通電相の相電圧と閾値との比較結果に応じて通電モードを切り替える。ブラシレスモータが第1の回転速度N1以上かつ第2の回転速度N2以下で回転駆動する中速運転領域では、非通電相の相電圧が基準電圧を横切った第2の条件が成立し、かつ、その状態から所定角度回転するのに要する時間が経過したとき、又は、非通電相の相電圧が所定電圧を横切った第1の条件が成立したときに、通電モードを切り替える(S362〜S368)。また、ブラシレスモータが第2の回転速度N2より速く回転駆動する高速運転領域では、非通電相の相電圧が基準電圧を横切った第2の条件が成立したときに、通電モードを切り替える(S362、S369)。
(もっと読む)
ブラシレスモータの駆動装置
【課題】ブラシレスモータの脱調を抑制する。
【解決手段】複数の巻線を備えたブラシレスモータの各相に対するパルス電圧の通電モードを切り替えることで、ブラシレスモータを回転駆動するブラシレスモータの駆動装置は、非通電相の電圧(誘起電圧)と電圧閾値とに基づいて通電モードを順次切り替える(S36〜S40)。また、ブラシレスモータの駆動装置は、パルス電圧の印加直後に現われる誘起電圧の振れを検出しないように、PWM制御のデューティ比の下限値を設定すると共に(S33)、誘起電圧が低下しないように、通電モードの切り替えタイミングにおける誘起電圧変化と電圧閾値に基づいてデューティ比の上限値を設定する(S34)。そして、デューティ比をその上限値及び下限値で画定される範囲内に規制することで、ブラシレスモータの脱調を抑制する。
(もっと読む)
ブラシレスモータの駆動装置
【課題】ブラシレスモータにおける脱調の発生を抑制する。
【解決手段】3相ブラシレスモータの2相に通電する通電モードを非通電相に誘起される誘起電圧に基づいて切り替えるブラシレスモータの駆動装置において、目標回転速度に応じたPWM信号のデューティ比である目標デューティ比Dtが誘起電圧を検出可能なデューティ比の下限である検出限界値Dlim未満となった場合に、PWM信号の周期に応じて誘起電圧を検出するための検出タイミング(1/N)を設定し(S349)、検出タイミングにおけるPWM信号のデューティ比である検出時デューティ比D1をDlimに制限する(S350)。また、連続する検出タイミング間において、Dlimに制限された検出時デューティ比D1と、誘起電圧を検出しないときの非検出時デューティ比D2〜DNと、を加算平均した平均デューティ比がDtに近づくようにD2〜DNを設定する(S351)。
(もっと読む)
モータ駆動装置及び記録装置
【課題】ホール素子自体の実装位置がずれている場合であっても、あるいは加減速を頻繁に繰り返す駆動形態においてもモータの駆動上の誤差を正確に補正すること。
【解決手段】モータ駆動装置であって、複数相のコイルと、ロータの回転に応じて電圧を出力する複数の検出手段とを有するブラシレスモータと、制御信号に基づいて前記複数相のコイルに対する電流の供給先を切り替えることによって、前記ブラシレスモータを駆動する駆動手段と、前記複数の検出手段から出力される検出信号と、前記ロータの回転角に応じた予め求めた電圧と前記複数の検出手段から得られる前記ロータの回転角に応じた電圧との差に基づいた補正信号との加算結果に基づいて、前記制御信号を生成する生成手段とを備える。
(もっと読む)
モータ制御システム
【課題】矩形波制御実行中にコンバータによる昇圧動作の開始を適時に行ってシステム損失の増加を抑制することができるモータ制御システムを提供する。
【解決手段】モータ制御システムは、電源、コンバータ、インバータおよび交流モータと、コンバータおよびインバータの作動を制御することにより、正弦波PWM制御、過変調制御および矩形波制御のいずれかの制御方式でモータを駆動させる制御部とを備える。制御部は、電源から供給される直流電圧をコンバータで昇圧せずにインバータに供給し、モータについて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御が実行されるように制御する。この場合において、制御部は、電流ベクトルが昇圧開始前後でシステム損失が等しくなるモータトルクT2に相当する電流位相になったときにコンバータによる昇圧動作を開始させる。
(もっと読む)
モータ制御システム
【課題】1つのコンバータの出力電圧で複数のモータを駆動するモータ制御システムにおいて、各モータに対応して行われるフィードバック制御同士の干渉を防止してシステム電圧の可変制御を安定して滑らかに行えるようにする。
【解決手段】モータ制御システムは、コンバータと、2つのインバータと、2つの交流モータと、制御部とを備える。制御部は、少なくとも一方のモータついて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御されるようにシステム電圧を電流位相のフィードバック制御により可変するにあたり、電流ベクトルからそれぞれ求めたシステム電圧偏差が大きい方のモータをフィードバック制御の対象として選択する(S20〜S28)。
(もっと読む)
モータ制御システム
【課題】交流モータにおいて最適電流進角ライン上か又はその近傍での電流位相による矩形波制御を積極的に用いることによってシステム全体の損失を効果的に低減する。
【解決手段】モータ制御システム10は、バッテリ11からの直流電圧を昇降圧可能なコンバータ20と、コンバータ20による昇圧直流電圧を交流電圧に変換するインバータ22と、インバータ22から交流電圧が印加されて駆動される交流モータM1と、入力されるトルク指令値に応じてコンバータ20およびインバータ22を作動制御することにより交流モータを矩形波制御等の複数の制御方式で駆動制御可能な制御部26とを備える。制御部26は、交流モータM1が矩形波制御中であるとき、交流モータM1に流れるモータ電流のd軸q軸平面上における電流ベクトルの電流位相(id,iq)が最適電流進角ライン上に近づくようにシステム電圧指令値VH*を補正する。
(もっと読む)
ブロアモータ駆動装置
【課題】ブロアモータ側に付いている制御装置の基準クロックである動作クロックの精度が低いブロアモータ制御装置でも、実回転速度の検出誤差を抑制し、バラツキの少ない回転動作を可能とする。
【解決手段】上位システムからPWM信号デューティ比を用いて、目標回転速度を与えられるブロアモータ駆動装置であり、PWM信号の周期誤差を算出し、位置検出センサから算出されたロータ回転速度を、周期誤差に基づき乗算補正し速度制御を実施する。
(もっと読む)
ブラシレスモータおよびこれを備える車両
【課題】ロータの回転が不安定になることが抑制される構成を備え、そのうえでコストの低減に貢献することのできるブラシレスモータおよびこれを備える車両を提供する。
【解決手段】モータは、第1U相コイル32Aおよび第2U相コイル32Bと、第1V相コイル32Cおよび第2V相コイル32Dを有する2相の第1コイル32と、第1U相コイル42Aおよび第2U相コイル42Bと、第1V相コイル42Cおよび第2V相コイル42Dとを有する2相の第2コイル42とを有している。そして、各U相コイル32A,32Bおよび各V相コイル32C,32Dの周方向Wの位置と、各U相コイル42A,42Bおよび各V相コイル42C,42Dの周方向Wの位置とが互いに異なる。
(もっと読む)
インバータ制御装置及びインバータ制御方法
【課題】安定な制御系である、インバータ制御装置及び制御方法を提供する。
【解決手段】 直流電源から入力される直流電力を交流電力に変換し、モータに供給するインバータ6と、インバータ6から出力される交流電圧の指令値を、交流電流の検出値に基づき算出する指令値算出手段と、指令値の位相又は検出値の位相を補償する位相補償手段と、位相補償手段により補償された指令値又は検出値に基づき、インバータ6を制御するインバータ制御手段と、モータ8の回転速度を検出するモータ回転速度検出手段とを備え、位相補償手段は、所定の位相余裕を得るために設定された位相補償時間及び回転速度に基づき位相進み量を算出し、位相進み量に応じて、モータ8の固有の特性に基づく位相を補償する。
(もっと読む)
駆動装置および車両
【課題】モータを良好に駆動するのに必要な電圧センサに検出誤差がある異常を判定する。
【解決手段】モータのトルク指令Tm*に基づいてPWM制御モードと矩形波制御モードとのうちいずれかの制御モードでインバータを制御するものにおいて、矩形波制御モードは、電圧センサにより検出された駆動電圧系の電圧VHとモータの回転数Nmとに基づいて電圧位相上限θlimを設定すると共に、設定した電圧位相上限θlimを用いてトルク指令Tm*に基づいて電圧位相指令θ*を設定して矩形波信号を出力する制御モードであり、インバータの制御モードCmの過変調制御モードから矩形波制御モードへの切り替え直前の過変調制御モードにおけるモータの電圧位相θovmが切り替え直後の矩形波制御モードで設定すべき電圧位相上限θlimより大きい場合には(S310)、電圧センサに検出誤差があるセンサ異常と判定する(S330)。
(もっと読む)
インバータ制御装置および車両
【課題】矩形波制御から過変調制御に切り替えた後のモータのトルク変動を抑制する。
【解決手段】過変調制御によってインバータを制御するときに、d軸,q軸の電流Id,Iqと電流指令Id*,Iq*との差分と比例項,積分項の制御ゲインと積分項の積分区間とを用いた電流フィードバック制御によってd軸,q軸の電圧指令Vd*,Vq*を設定してインバータを制御するものにおいて、矩形波過変調切替時に、矩形波過変調切替によるモータのトルク変動が大きくなりやすい変動想定状態のときには(S110,S120)、変動想定状態でないときに比して比例項,積分項のゲインを大きくすると共に積分項の積分区間を短くする(S140)。
(もっと読む)
モータ制御装置
【課題】モータを素早く起動することが可能なモータ制御装置を提供する。
【解決手段】モータ制御装置100は、3相モータ10に供給する電圧で規定された制御条件、又は、3相モータ10に供給する電圧及び3相モータ10を制御するPWM信号の周波数の関係で規定された制御条件の少なくともいずれか一方が記憶されてある制御条件記憶部3と、3相モータ10を動力源とするポンプ30で流通させる粘性流体の温度に基づいて、制御条件記憶部3から制御条件を抽出する制御条件抽出部2と、3相モータ10の起動時に、抽出された制御条件に基づくPWM信号でインバータ11が有するトランジスタQ1−Q6を制御するPWM制御部1と、を備える。
(もっと読む)
モータ制御装置
【課題】電流によるインダクタンス変動に追従した電流指令を生成して、トルク制御の精度を向上させる。
【解決手段】電流指令ベクトルの向きを示す電流位相角βrefとトルク指令Trefとを入力し、電流位相角βrefの示す方向を向く複数の電流指令ベクトルのうち、トルク指令Trefに対応する総合トルクを発生させ得る電流指令ベクトルを示すd軸電流指令Id及びq軸電流指令Iqを生成する電流指令生成部24を備え、モータに流れる電流値に応じて変化するd軸及びq軸のインダクタンス(Ld,Lq)を電流値Iaに関連付けたインダクタンス情報Da3を予め設定しておき、d軸及びq軸の電流指令(Id,Iq)を生成するにあたり、既に出力したd軸及びq軸の電流指令(Id,Iq)によってモータに流れたとみなせる電流値Iaに対応するd軸及びq軸のインダクタンス(Ld,Lq)を用いてd軸及びq軸の電流指令(Id,Iq)を生成する。
(もっと読む)
1 - 20 / 226
[ Back to top ]