
Fターム[5H560XA03]の内容
無整流子電動機の制御 (40,007) | 制御方式 (6,312) | フィードバック制御 (2,621) | 電圧フィードバック (234)
Fターム[5H560XA03]に分類される特許
1 - 20 / 234
電気自動車のモータ制御装置
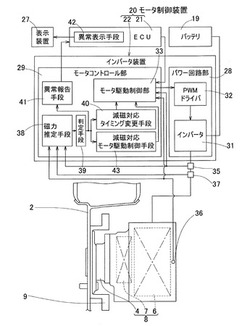
【課題】 埋込磁石型同期モータにおいて、永久磁石の減磁が生じた場合に、モータ駆動力の低下を抑えることのできる電気自動車のモータ制御装置を提供する。
【解決手段】 モータ6のロータの永久磁石の磁力を推定する磁力推定手段38と、その判定手段39と、減磁対応タイミング変更手段40とを、インバータ装置22またはECU21に設ける。磁力推定手段38は、モータ回転数、モータ電圧、およびモータ電流の内の少なくとも2つの検出信号から、定められた規則に従い、磁力の推定を行う。判定手段39は、減磁であるか否かを判定する。減磁対応タイミング変更手段40は、判定手段39による減磁であるとの判定結果に応じて、インバータ装置22によるモータ駆動につき、モータのリラクタンストルクが増大するように、ロータの位相に対する最大電流を流すタイミングを変更する。
(もっと読む)
交流電動機の制御装置

【課題】パルス幅過変調制御方式を使用するときのキャリア周波数に起因する雑音の官能上の感度を低減する。
【解決手段】ECU3は、モータの回転に伴って発生する雑音の周波数成分であり、且つ、その周波数がモータの回転数整数倍である高調波の周波数成分のうち、振幅が最大である高調波の周波数を求める周波数算出部35と、パルス幅過変調制御方式による制御を実施するときのキャリア周波数を、周波数算出部35によって求められた高調波の周波数に設定する周波数設定部36と、を備える。
(もっと読む)
電動オイルポンプ装置
【課題】円滑に起動し、センサレス制御で確実に駆動できるブラシレスモータを備えた電動オイルポンプ装置を提供する。
【解決手段】基板19と対向するロータ6の回転面には、周縁部から中心に向かう白色の線状の検出対象物21が等角度で複数形成されている。基板19には、ロータ6と対向する面上に、発光素子と受光素子の2つの赤外線素子同士が同一方向に並んで配置された反射型フォトセンサである光センサ22が搭載されている。光センサ22の発光部から出た赤外光は、ロータ6の回転面に形成された検出対象物21に反射して光センサ22の受光部に入射する。制御部20は、光センサ22から出力された検出対象物21の検出パターンの情報に基づき、ロータ6の角度位置を演算する。
(もっと読む)
単相ブラシレスモータ制御装置
【課題】単相コイルで構成されるモータにおいても、追加部品を必要とせず、駆動回路や電源回路などの耐圧破壊を防ぐ過電圧保護回路を備えた単相ブラシレスモータ制御装置を提供する。
【解決手段】モータコイル13を駆動するドライバ回路11と、ロータの位置を検出した信号と、ドライバ回路11の出力とに基づいて、ドライバ回路11を構成するドライバ回路用スイッチング素子M11〜M14の制御信号を生成するプリドライバ10と、ドライバ回路11の出力の電位が電源電圧から予め設定されたしきい値以上の電位に上昇したとき、回生経路を形成する過電圧検出回路12と、回生経路を構成する回生経路用スイッチング素子とを備える。
(もっと読む)
モータ駆動装置およびにこれを用いた電気機器
【課題】非常に負荷が軽く不安定なシステム状態もしくは非常に負荷が重い状態であっても、安定駆動できるとしたモータ駆動装置を提供すること。
【解決手段】端子電圧取得部5が取得した端子電圧の発生タイミングによって通電角を120度以上180度未満の間で決定する通電角決定部10と、周波数設定部9で設定した周波数と通電角決定部10で決定した通電角で第2の波形信号を出力する第2波形発生部12と、端子電圧取得部5が取得した端子電圧が所定の状態に近づくよう第2の波形信号を補正した補正波形信号を出力するので、広い負荷範囲で電流位相が安定し、安定したモータ駆動装置の提供が可能となる。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、正弦波PWM制御方式または過変調制御方式または矩形波制御方式でインバータを制御する制御部18とを含む。制御部18は、正弦波PWM制御方式の実行時に、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、インバータ16の入力電圧VHを低下させ、インバータ16の制御方式を正弦波PWM制御方式から過変調制御方式または矩形波制御方式に切り替える電圧低下制御部30を有する。
(もっと読む)
モータ制御システム
【課題】矩形波制御実行中にコンバータによる昇圧動作の開始を適時に行ってシステム損失の増加を抑制することができるモータ制御システムを提供する。
【解決手段】モータ制御システムは、電源、コンバータ、インバータおよび交流モータと、コンバータおよびインバータの作動を制御することにより、正弦波PWM制御、過変調制御および矩形波制御のいずれかの制御方式でモータを駆動させる制御部とを備える。制御部は、電源から供給される直流電圧をコンバータで昇圧せずにインバータに供給し、モータについて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御が実行されるように制御する。この場合において、制御部は、電流ベクトルが昇圧開始前後でシステム損失が等しくなるモータトルクT2に相当する電流位相になったときにコンバータによる昇圧動作を開始させる。
(もっと読む)
同期電動機の制御システム
【課題】
同期電動機を120度通電方式から180度通電方式に切り替える際に、切換速度より小さい速度付近で120通電方式のでは電流位相が進んで力率が悪化する問題があった。停止状態から中高速域に至る広い速度範囲において、トルクショックの小さいシームレス駆動を行うことができる同期電動機の制御システムを提供する。
【解決手段】
同期電動機を120度通電方式で起動し、その後、180度通電方式に切り替えて駆動する制御システムで、120度通電方式から180度通電方式へ切り替える際に、120度通電中の力率を改善する力率改善手段を設け、この力率の改善された120度通電方式から180度通電方式に切り替えて同期電動機を駆動する。
(もっと読む)
電力変換装置の制御装置
【課題】 インバータを利用したモータ駆動システムにおいて、同期PWMモードでのインバータの運転時に、トルク不足の問題を発生させることなく、モータの損失の増加を回避し、効率低下を抑える。
【解決手段】 インバータ制御部110は、インバータ40のスイッチング素子のON/OFF切替を行うためのゲート信号の生成モードとして、非同期PWMモードと同期PWMモードとを有する。直流電圧指令値演算部143は、インバータ制御部110が同期PWMモードでゲート信号を生成している場合に、インバータ40からモータ50に供給される電流のうちd軸電流が0または負になるように、DC−DCコンバータ20からインバータ40に供給する直流電圧を指示する指令値を演算する。
(もっと読む)
電気洗濯機
【課題】脱水性能確保と、過大パワーの防止による保護を実現すること。
【解決手段】衣類を収納するドラム21を回転駆動する電動機26、電動機26に交流電力を供給するインバータ回路35を有し、電動機入力電圧可変手段42、電動機入力電流検知手段43、位置検知手段34を有し、脱水時に電動機26の出力トルクを所定値に制限する第1の速度範囲よりも高速側に、電動機入力パワーを略一定に制限する第2の速度範囲を有することにより、第1の速度範囲での過大トルクの防止と、第2の速度範囲での電動機の入力パワーの制限が可能となり、良好な脱水性能が確保と共に、信頼性の高い装置の実現、また電源系統に対する負担低減を行うことができる。
(もっと読む)
モータ制御システム
【課題】1つのコンバータの出力電圧で複数のモータを駆動するモータ制御システムにおいて、各モータに対応して行われるフィードバック制御同士の干渉を防止してシステム電圧の可変制御を安定して滑らかに行えるようにする。
【解決手段】モータ制御システムは、コンバータと、2つのインバータと、2つの交流モータと、制御部とを備える。制御部は、少なくとも一方のモータついて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御されるようにシステム電圧を電流位相のフィードバック制御により可変するにあたり、電流ベクトルからそれぞれ求めたシステム電圧偏差が大きい方のモータをフィードバック制御の対象として選択する(S20〜S28)。
(もっと読む)
同期電動機の駆動システム及び同期電動機
【課題】
位置センサを用いない同期電動機においては、同期電動機の発生する誘起電圧(速度起電圧)に基づいて位置を求めているため、誘起電圧の小さい零速度近傍(停止状態)や低速度域では誘起電圧の検出感度が低下してしまい位置情報がノイズに埋もれるという課題があった。
【解決手段】
同期電動機の三相固定子巻線の2相を順次選択して駆動する際に、非通電相への誘起電圧を検出し、この非通電相の誘起電圧と回転子位置情報を予め関係付けしておき、検出した誘起電圧から回転子位置情報を逆算することで回転子の位置推定を行い、更にその回転子位置情報の変化率から回転速度の検出を行って位置制御や速度制御を高精度に実現する。
(もっと読む)
交流電動機の駆動装置およびそれを搭載する車両、ならびに交流電動機の制御方法
【課題】変調PWM制御および正弦波PWM制御を切換えて制御する交流電動機の駆動装置において、交流電動機の回転速度が急変した場合の緊急切換動作時におけるトルク急減を抑制する。
【解決手段】車両100は、ECU300によってPWM制御を用いてインバータ130が制御されてモータジェネレータ140を駆動することによって走行する。ECU300は、正弦波PWM制御および過変調PWM制御を含む複数の制御モードを切換えてインバータ140を制御する。ECU300は、過変調PWM制御を実行中に、駆動輪160がスリップ状態からグリップ状態に変化することに伴って電流が急増した場合に、過変調PWM制御から正弦波PWM制御に強制的に切換えるとともに、正弦波PWM制御における変調率の上限値を緩和して、正弦波PWM制御において通常時よりも大きなトルクが出力できるようにする。
(もっと読む)
モータ制御システム
【課題】交流モータにおいて最適電流進角ライン上か又はその近傍での電流位相による矩形波制御を積極的に用いることによってシステム全体の損失を効果的に低減する。
【解決手段】モータ制御システム10は、バッテリ11からの直流電圧を昇降圧可能なコンバータ20と、コンバータ20による昇圧直流電圧を交流電圧に変換するインバータ22と、インバータ22から交流電圧が印加されて駆動される交流モータM1と、入力されるトルク指令値に応じてコンバータ20およびインバータ22を作動制御することにより交流モータを矩形波制御等の複数の制御方式で駆動制御可能な制御部26とを備える。制御部26は、交流モータM1が矩形波制御中であるとき、交流モータM1に流れるモータ電流のd軸q軸平面上における電流ベクトルの電流位相(id,iq)が最適電流進角ライン上に近づくようにシステム電圧指令値VH*を補正する。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、実変調度となまし変調度との間に乖離が生じても、PWM制御モードと過変調制御モードとの間の制御モード切替に際し、過大な電流が生じることを抑制することである。
【解決手段】回転電機制御システム10は、回転電機20と、回転電機20を駆動する電源回路ブロック12と、電流フィードバックの制御ブロック22と、制御装置40で構成される。制御装置40は、実変調度と、なまし変調度とを求める変調度取得部42と、実変調度となまし変調度の間について予め定めた所定条件に基づいて、PWM制御モードと過変調制御モードとの間で制御モードを切り替える制御モード切替部44を含んで構成される。
(もっと読む)
電動パワーステアリング装置
【課題】インバータ装置を構成しているスイッチング素子に過電流が流れた場合でも、昇圧回路を構成するスイッチング素子を保護することができる電動パワーステアリング装置を提供すること。
【解決手段】インバータ装置に流れる少なくとも1相以上の電流値が所定値1(I0)以上になった場合(ステップ、S101:YES)が、所定時間T1以上経過(ステップ、S102:YES)し、かつ、出力電圧検出手段から検出した出力電圧が所定値2(V1)以下になった場合(ステップ、S103:YES)には、第1および第2のスイッチング素子のオン/オフ比を50%に制限する(ステップ、S104)。昇圧回路の第1、および第2のスイッチング素子のオン/オフ比を50%に制限するので、昇圧回路内に流れる電流の急激な増加を抑えることができる。
(もっと読む)
回転機の制御装置
【課題】デッドタイム付与後の実際のスイッチング状態の切替タイミングが複数のレッグ間で重なることで、サージ電圧が大きくなるおそれがあること。
【解決手段】ノルム設定部30では、要求トルクTrと電気角速度ωとに基づき、インバータINVの出力電圧ベクトルのノルムを設定する。位相設定部26では、推定トルクTeを要求トルクTrにフィードバック制御するための操作量として位相δを設定する。操作状態設定部34では、ノルム設定部30によって設定されたノルムVnと、位相設定部26によって設定された位相δとに基づき操作信号を生成してインバータINVに出力する。操作状態設定部34には、デッドタイム付与後における実際のスイッチング状態の切り替えが複数レッグで同時になされない波形が記憶されている。
(もっと読む)
単相ブラシレスモータの駆動回路
【課題】 ホール素子などの位置検出素子を用いないで単相ブラシレスモータを駆動することで、モータの小型化や低コスト化を実現する。
【解決手段】 単相ブラシレスモータの駆動コイルに第1および第2駆動電流をいずれも供給しない非通電期間を挟んで、駆動コイルに第1駆動電流と第2駆動電流とを交互に供給するための駆動信号を生成する駆動信号生成回路と、駆動信号に応じて駆動コイルに第1または第2駆動電流を供給する出力回路と、非通電期間に、駆動コイルに発生する誘起電圧のゼロクロスを検出するゼロクロス検出回路と、を有し、駆動信号生成回路は、出力回路が駆動コイルに第1または第2駆動電流を供給する通電期間の開始から、ゼロクロス検出回路がゼロクロスを検出するまでの駆動周期に基づいて、次の通電期間の長さを決定し、ゼロクロス検出回路は、非通電期間の開始から所定時間経過後にゼロクロスの検出を開始する。
(もっと読む)
モータの駆動制御プログラム、駆動制御方法及び駆動制御装置
【課題】従来のモータ制御方法では、モータの制御性を十分に確保することができない問題がある。
【解決手段】本発明にかかるモータ駆動制御プログラムは、モータの回転位置に応じて生成するPWM信号の状態を遷移させる演算コア10と、ドライバ回路3を介して前記PWM信号をモータに出力する出力インタフェース13と、ドライバ回路3がPWM信号に基づき生成した3相の駆動信号から選択した比較対象検出信号SPと3相の駆動信号の中点電圧を示すのセンタータップ電圧CTとを比較するコンパレータ15と、を有するプロセッサにおいて演算コア10で実行されるモータの駆動制御プログラムであって、コンパレータ15の出力信号の値に基づきコンパレータ積分値を増減し、コンパレータ積分値がカウント初期値に達したことに応じてモータの回転位置が遷移したことを検出し、検出結果に応じてPWM信号の状態を次状態に遷移させる。
(もっと読む)
ブラシレスモータ起動装置および起動方法
【課題】ロータ停止位置判定の誤差を少なくすることのできるブラシレスモータ起動装置および起動方法を提供する。
【解決手段】実施形態のブラシレスモータ起動装置1は、誘導電圧検出回路11が、ブラシレスモータ101の界磁コイルLU、LV、LWの中性点CN1に発生する界磁コイルの誘導電圧と、界磁コイルLU、LV、LWに並列に接続された抵抗RU、RV、RWの共通接続点である仮想中性点CN2に発生する仮想中性点電圧と、の差電圧に比例する電流を生成する。ブラシレスモータ起動装置1は、積分回路12が、1対の通電相に順方向および逆方向の電流を流したときに誘導電圧検出回路から出力される電流を、それぞれ一定期間、積分する。ブラシレスモータ起動装置1は、極性判定回路13が、積分回路12の積分値の極性を判定する。
(もっと読む)
1 - 20 / 234
[ Back to top ]