
Fターム[5H560XA04]の内容
無整流子電動機の制御 (40,007) | 制御方式 (6,312) | フィードバック制御 (2,621) | 速度フィードバック (656)
Fターム[5H560XA04]に分類される特許
1 - 20 / 656
モータ制御装置
画像形成装置
モータ駆動制御装置及び集積回路装置
電気自動車のモータ制御装置
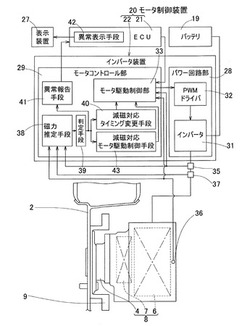
【課題】 埋込磁石型同期モータにおいて、永久磁石の減磁が生じた場合に、モータ駆動力の低下を抑えることのできる電気自動車のモータ制御装置を提供する。
【解決手段】 モータ6のロータの永久磁石の磁力を推定する磁力推定手段38と、その判定手段39と、減磁対応タイミング変更手段40とを、インバータ装置22またはECU21に設ける。磁力推定手段38は、モータ回転数、モータ電圧、およびモータ電流の内の少なくとも2つの検出信号から、定められた規則に従い、磁力の推定を行う。判定手段39は、減磁であるか否かを判定する。減磁対応タイミング変更手段40は、判定手段39による減磁であるとの判定結果に応じて、インバータ装置22によるモータ駆動につき、モータのリラクタンストルクが増大するように、ロータの位相に対する最大電流を流すタイミングを変更する。
(もっと読む)
永久磁石同期電動機のd軸電流を制御するモータ制御装置

【課題】過熱による永久磁石同期電動機の永久磁石の熱減磁が生じる事態を回避することができるモータ制御装置を提供する。
【解決手段】q軸電流及びd軸電流検出部11は、q軸電流Iq及びd軸電流Idを、U相電流IU、V相電流IV及びW相電流IW及びロータ52の回転角度θに基づいて検出する。q軸電流指令値生成部12は、q軸電流指令値Iqcomを速度指令値ωcomに基づいて生成する。d軸電流指令値生成部13は、永久磁石同期電動機5の定常時における永久磁石54a,54b,54c,54dの温度上昇量が最小になるd軸電流指令値Idcomを、ロータ52の回転速度ωに基づいて生成する。
(もっと読む)
モータ駆動装置、シート搬送装置及び画像形成装置
【課題】DCブラシレスモータを駆動源として用いて被駆動体の速度を自在に調整するとともに、回転センシング信号へのノイズの混入に起因するモータ回転の不安定化、及び負荷変動に起因する第1搬送ローラ16aの速度不安定化を抑える
【解決手段】DCブラシレスモータからなる搬送モータ210の励磁コイルの切り替えタイミングをドライバ回路212に把握させるために搬送モータ210の回転量を検知するホール素子217とは別に、同回転量をホール素子217よりも高精度に検知するモータエンコーダ211を搬送モータ210に搭載するとともに、ドライバ回路212を搬送モータ210に搭載し、モータエンコーダ211による検知結果に基づいてドライバ回路212からコイルに供給される励磁電圧の量を調整することで、搬送モータ210の回転速度を調整する速度調整処理を実施するように、モータ制御回路210を構成した。
(もっと読む)
モータ駆動装置、シート搬送装置及び画像形成装置
【課題】ドライバ回路に入力される回転センシング信号へのノイズの混入に起因するモータ回転の不安定化と、モータ起動時のギヤ歯の衝突に起因するギヤの寿命低下とを抑えつつ、搬送モータによって第1搬送ローラ16aを迅速に加速する。
【解決手段】DCブラシレスモータからなる搬送モータ210の回転量を検知するモータエンコーダ211と、ドライバ回路212とを搬送モータ210に搭載し、モータ起動時にて、搬送モータ210の回転速度を第1加速特性で加速させるように搬送モータ210を駆動しながら、モータエンコーダ211による検知結果と第1加速特性とに基づいて把握したタイミングが到来した後に、搬送モータ210の回転速度を第1加速特性よりも加速性に優れた第2加速特性で加速させるように搬送モータ210を駆動する加速度変更処理を実施するようにモータ制御回路200を構成した。
(もっと読む)
駆動装置及びそれを備えた画像形成装置
【課題】画像品質を向上させることができる駆動装置及びそれを備えた画像形成装置を提供する。
【解決手段】駆動装置は、位置・速度追従制御器130を備え、位置・速度追従制御器130は、PID制御器140と、減算器131と、PWM回路133と、ゲイン設定部134と、ゲイン設定指示部135と、を備え、ゲイン設定指示部135は、DCモータ101がホールド状態になった時刻以降において、位置偏差が予め定められた閾値以下、かつ、一定時間経過後に、ゲイン設定部134にホールド時ゲインを設定させ、スルーアップ制御が開始された場合に、ゲイン設定部134に駆動時ゲインを設定させる構成を有する。
(もっと読む)
モータ制御装置、モータ制御方法
【課題】モータを精度良く制御することを可能にするモータ制御装置、及びモータ制御方法を提供する。
【解決手段】電流指令値から、電圧指令値を生成し、モータに流れる検出電流によりフィードバック制御するモータ制御装置であって、モータの速度制御を行う速度PI制御部303と、モータが一定速度で回転しているときの速度制御部の出力に基づく電圧指令値を測定する電圧測定部と、測定された電圧指令値に基づき、モータの回転位置に対する補正値を算出するオフセット算出部403と、を備える。
(もっと読む)
モータ制御装置、モータ制御方法
【課題】モータを精度良く制御することを可能にするモータ制御装置、及びモータ制御方法を提供する。
【解決手段】電流指令値から、電圧指令値を生成し、モータに流れる検出電流によりフィードバック制御するモータ制御装置であって、前記モータを一定速度で回転させ、一定電流量のd軸電流を流す速度指令値に基づいてモータの速度制御を行う速度PI制御部303と、モータが一定速度で回転し、一定電流量のd軸電流が流れているときの速度制御部の出力に基づく電流指令値を測定する電流測定部402と、測定された電流指令値に基づき、モータの回転位置に対する補正値を算出するオフセット算出部403と、を備える。
(もっと読む)
モータ制御装置
【課題】起動時間の短縮化が図れるモータ制御装置を提供する。
【解決手段】マイクロコンピュータ11は、速度比率指令値演算部21と、第1スイッチ22と、速度比率偏差演算部23と、速度制御部24と、電流比率指令値演算部25と、第2スイッチ26と、電流比率偏差演算部27と、q軸電流制御部28と、起動制御部43とを含んでいる。速度比率指令値演算部21は、予め設定されたロータの回転速度の最大値に対する速度指令値ω*の比率を、速度比率指令値として演算する。起動時には、第1スイッチ22は、速度比率指令値を第2スイッチ26に入力させ、第2スイッチ26は、第1スイッチ22から入力する速度比率指令値を、q軸電流比率指令値として電流比率偏差演算部27に入力させる。
(もっと読む)
ブラシレスモータ用制御装置およびそれを備えた洗濯機
【課題】簡単、安価な構成および簡単な演算での回転位置センサの取付誤差を補正して、振動、騒音を低減できるブラシレスモータ用制御装置およびそれを備えた洗濯機を提供する。
【解決手段】ブラシレスモータ用制御装置5は、ホールセンサ55u,55v,55wの出力に基づいて、複数のホールセンサ55u,55v,55wの複数の間隔データを得ると共に、複数の間隔データの平均値を求める誤差検出部80とを備える。上記複数の間隔データおよび平均値はセンサ誤差メモリ部65に記憶される。センサ誤差補正部66は、上記間隔データおよび平均値に基づいて、ホールセンサ55u,55v,55wの間隔のズレを補正する。これにより、角速度推定部67は、ホールセンサ55u,55v,55wの間隔のズレを補正した結果を示す信号に基づいて、ブラシレスモータ4のロータの回転速度を正確に求めることができる。
(もっと読む)
ブラシレスモータの駆動装置及び制御方法、ブラシレスファンモータの駆動装置及び制御方法
【課題】精度良くロータ停止位置を検出できるようにする。
【解決手段】ブラシレスモータのロータ停止位置を検出する際に、位置信号発生手段が、複数相の前記コイルに流す電流のあらかじめ定められた複数の通電パターンを指令する信号を発生させる。カウンタが、複数の前記通電パターンを指令する信号が出力されることで計数を開始する。制御装置は、複数の通電パターンのうち、第1の通電パターンによる通電を指令し、第1の通電パターンの通電を指令する信号を出力してから、カウンタから所定の時間が経過した信号を受け取ったら、続く第2の通電パターンによる通電を指令する信号を出力すると共に、カウンタのカウント値を初期化する。
(もっと読む)
同期電動機の制御装置及び制御方法
【課題】駆動する永久磁石同期電動機が任意のモータであっても、弱め界磁制御と最大トルク制御との切り換えを安定して行うことができる同期電動機の制御装置及び制御方法を提供する。
【解決手段】最大線間電圧演算部11によって演算された最大線間電圧VmaxとPMモータ1の電気角速度ωeとを用いて弱め界磁制御用のd軸電流演算値を演算するd軸電流演算部12と、最大線間電圧VmaxとPMモータ1の電気角速度ωeとに基づいて、弱め界磁制御用のd軸電流演算値と最大トルク制御用のd軸電流設定値とのいずれかをd軸電流指令値Id*として出力させる弱め界磁制御切換部13とを設ける。また、d軸電流演算部12によって、最大線間電圧Vmaxと、PMモータ1の電気角速度と、PMモータ1のモータパラメータである逆起電力係数及びd軸インダクタンスとからd軸電流演算値を演算する。
(もっと読む)
駆動装置及びそれを備えた画像形成装置
【課題】ホールド制御時に発生するモータ振れを従来のものよりも短時間で抑制することができる駆動装置及びそれを備えた画像形成装置を提供する。
【解決手段】駆動装置は、位置・速度追従制御器130を備え、位置・速度追従制御器130は、PID制御器140と、減算器131と、PWM回路133と、ゲイン設定部134と、ゲイン設定指示部135と、位置偏差補正部136と、を備え、ゲイン設定指示部135は、減算器131が出力する位置偏差が予め定められた±eパルス相当であり、かつ、その位置偏差がホールド状態になったホールド時から予め定められたt時間継続した場合は、ゲイン設定部134に、位置偏差をキャンセルするために予め実験により取得されたホールド時ゲインを設定させる構成を有する。
(もっと読む)
3相ブラシレスモータの駆動制御装置
【課題】簡易な構成で上位コントローラの位相計数機能を利用してモータ駆動制御を行なえる3相ブラシレスモータの駆動制御装置を提供する。
【解決手段】モータドライバ回路2は、3相分のホールセンサ信号HUHVHWを2相分のエンコーダ出力形式の信号ABに変換して生成した変換信号を上位コントローラ5に出力するセンサ信号変換回路3と、上位コントローラ5から出力されるモータの回転方向及び回転速度指令に基づいて3相ブラシレスモータ1を駆動するモータ駆動回路4と、を具備した。
(もっと読む)
永久磁石形同期電動機の制御装置
【課題】過渡状態においても磁極位置検出回路を用いずに磁極位置と速度を正確に演算する。
【解決手段】回転子に同期した直交回転座標軸γδ軸を定義し、高周波電圧を前記γ軸基本波電圧指令値に加算してγ軸電圧指令値を印加する。検出した電動機電流δ軸成分から前記高周波電圧と同じ周波数の余弦波成分のフーリエ級数を演算し、位置推定誤差を演算する。
(もっと読む)
モータ制御装置
【課題】PWM制御における搬送波周期内で、2相の電流の高周波成分を確実に検出できるように3相のPWM信号パターンを生成可能なモータ制御装置を提供する。
【解決手段】実施形態によれば、電流検出素子をインバータ回路の直流側に接続して電流値に対応する信号を発生させ、PWM信号生成手段は、モータ磁極位置に追従するように3相のPWM信号パターンを生成する。電流検出手段が電流検出素子に発生した信号とPWM信号パターンとに基づいてモータの相電流を検出すると、PWM信号生成手段は、電流検出手段が、PWM信号の搬送波周期内における4点のタイミングで2相の電流をそれぞれ2回検出できるように3相のPWM信号パターンを生成する。更に電流微分手段が、前記2相のそれぞれについて2回検出した電流値の差を電流微分値として出力すると、磁極位置推定手段は、その電流微分値に基づいてモータの磁極位置を推定する。
(もっと読む)
モータ制御装置
【課題】モータの磁束を検出し、エンコーダ等の位置検出器を用いずに過渡応答時でも起動時でも正弦波駆動を安価に実現することを可能にするものである。
【解決手段】モータ100にモータの磁束を検出する磁束検出器102が取り付けられている。本実施例では説明の都合上、モータ100は三相の同期モータであるとする。磁束検出器102は図2に示すように、モータの磁石が発生する磁束を検出して、それぞれの位相差が約120度の正弦波状の磁束信号CS1 ,CS2 ,CS3を出力する。3相の巻線うち2相を励磁し、励磁時の前記位置検出手段の検出位置を前記制御手段が前記ブラシレスモータを駆動する出力波形の原点とすることで、起動時から正弦波駆動を可能とし、さらに過渡時においても、常に効率の良い正弦波駆動が安価に実現可能となる。
(もっと読む)
永久磁石形同期電動機の制御装置
【課題】過渡状態においても磁極位置検出回路を用いずに磁極位置と速度を正確に演算する。
【解決手段】回転子に同期した直交回転座標軸γδ軸を定義し、高周波電圧を前記γ軸基本波電圧指令値に加算してγ軸電圧指令値を印加する。検出した電動機電流δ軸成分微分値から前記高周波電圧と同じ周波数のフーリエ級数を演算し、位置推定誤差を演算する。
(もっと読む)
1 - 20 / 656
[ Back to top ]